1
Изобретение отсится к классу устройств предназначенных для измерения скорости вращения, и может использоваться например в следящих системах и системах стабилизации скорости бесконтактных двигателей постоянного тока (БДПТ) с широтно-импульсными датчиками положения ротора (ДПР), а также в системах автоматического управления с широтно-импульсной модуляцией для выработки реверсивных тахомет рических корректирующих сигналов.
Известно устройство измерения скорости вращения бесконтактного двигателя постоянного тока, содержащее широтно-импульсвый ДПР, три схемы совпадения, схему сборки, схему задержки импульсов на период несущей частоты и сумматор по модулю два, причем выходы трех датчиков ДПР подключены к попарно соединенным входам трех схем совпадения, выходы которых через
схему сборки соединены с первым входом сумматора по модулю два и с входом схемы задержки импульйов на период несущей частоты, выход которой подключен ко второму входу сумматора по модулю два.
Однако известное устройство не позволяет получать информацию о знаке скорости вращения, то есть является нереверсивным. Тем более , что в ряде случаев применение реверсивных тахогенераторов позволяет упростить устройства управления приводом, улучшить качественные показатели переходных процессов в следяпших системах и др.
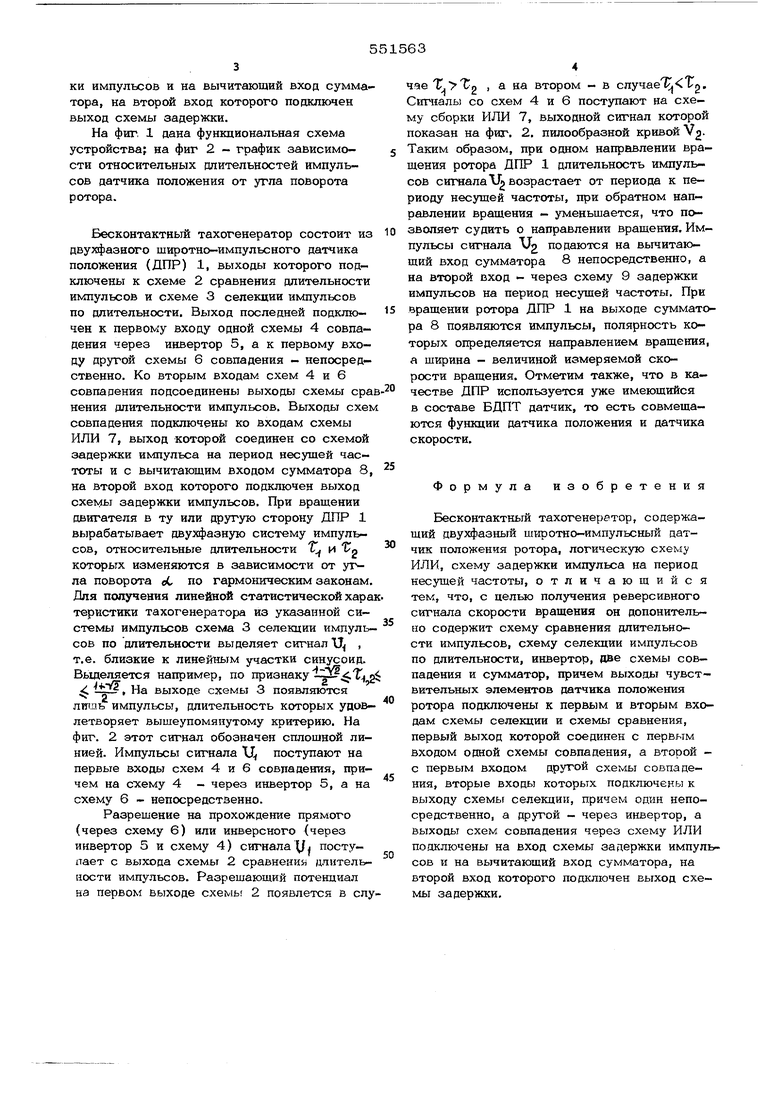
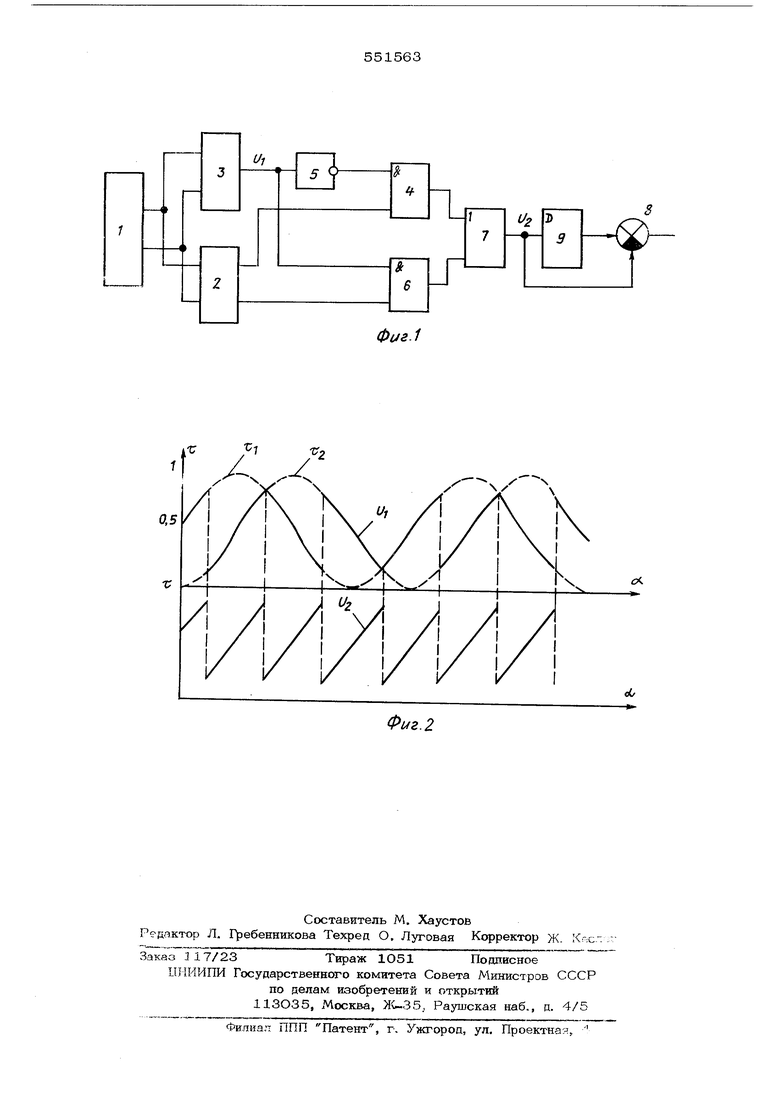
С целью получения реверсивного сигнала скорости вращения тахогенератор дополнительно содержит схему сравнения длительности импульсов, схему селекции импульсов по длительности, инвертор, две схемы совпадения и сумматор, причем выходы чувствительных элементов датчика положения ротора подключены к первым и вторым входам схемы селекции и схемы сравнения, первый выход которой соединен с первым входом одной схемы совпадения , а второй - с первым входом другой схемы совпадения, вторые входы которых подключены к пыходу схемы селекции, причем один непосредственно, а другой - через инвертор, а выходы схем совпадения через схему ИЛИ подключены на вход схемы задержки импульсов и на вычитающий вход сумматора, на второй вход которого подключен выход схемы задержки. На фиг, 1 дана функциональная схема устройства; на фиг 2 - график зависимости относительных длительностей импульсов датчика положения от угла поворота ротора. Бесконтактный тахогенератор состоит из двухфазного широтно-импульсного датчика положения (ДПР) 1, выходы которого подключены к схеме 2 сравнения длительности импульсов и схеме 3 селекции импульсов по длительности. Выход последней подключен к первому входу одной схемы 4 совпадения через инвертор 5, а к первому входу другой схемы 6 совпадения - непосредственно. Ко вторым входам схем 4 и 6 совпадения подсоединены выходы схемы сра нения длительности импульсов. Выходы схем совпадения подключены ко входам схемы ИЛИ 7, выход которой соединен со схемой задержки импульса на период несущей частоты и с вычитающим входом сумматора 8, на второй вход которого подключен выход схемы задержки импульсов. При вращении двигателя в ту или другую сторону ДПР 1 вырабатывает двухфазную систему импульсов, относительные длительности Т и Тр которых изменяются в зависимости от угла поворота вС по гармоническим законам. Для получения линейной статистической хара теристики тахогенератора из указанной системы импульсов схема 3 селекции импульсов по длительности выделяет сигнал 11, , т.е. близкие к линейным участки синусоид. Вьвделяется например, по признаку li, На выходе схемы 3 появляются t, На выходе схемы 3 появл$потся 2 лишь импульсы, длительность которых удовлетворяет вышеупомянутому критерию. На фиг. 2 этот сигнал обозначен сплошной линией. Импульсы сигнала ХТ поступают на первые входы схем 4 и 6 совпадения, причем на схему 4 - через инвертор 5, а на схему 6 - непосредственно. Разрешение на прохождение прямого (через схему 6) или инверсного (через инвертор 5 и схему 4) сигнала У j поступает с выхода схемы 2 сравнения длительности импульсов. Разрешающий потенциал на первом выходе схемь 2 появлется в слу чае втором - в случаеТ) Ug. Сигналы со схем 4 и 6 постзшают на схему сборки ИЛИ 7, выходной сигнал которой показан на фиг. 2. пилообразной кривой Vg. Таким образом, при одном направлении вращения ротора ДПР 1 длительность импульсов сигнала XIj возрастает от периода к периоду несущей частоты, при обратном направлении вращения - уменьшается, что по- зволяет судить о направлении вращения. Импульсы сигнала V2 подаются на вычитающий вход сумматора 8 непосредственно, а на второй вход - через схему 9 задержки импульсов на период несущей частоты. При вращении ротора ДПР 1 на выходе сумматора 8 появляются импульсы, полярность которых определяется направлением вращения, а ширина - величиной измеряемой скорости вращения. Отметим также, что в качестве ДПР используется уже имеющийся В составе БДПТ датчик, то есть совмещаются функции датчика положения и датчика скорости. Формула изобретения Бесконтактный тахогенеретор, содержащий двухфазный широтно-импульсный датчик положения ротора, логическую схему ИЛИ, схему задержки импульса на период несущей частоты, отличающийся тем, что, с целью получения реверсивного сигнала скорости вращения он допонительно содержит схему сравнения длительности импульсов, схему селекции импульсов по длительности, инвертор, две схемы совпадения и сумматор, причем выходы чувствительных элементов датчика положения ротора подключены к первым и вторым входам схемы селекции и схемы сравнения, первый выход которой соединен с первым входом одной схемы совпадения, а второй с первым входом другой схемы совпадения, вторые входы которых подключены к выходу схемы селекции, причем один непосредственно, а другой - через инвертор, а выходы схем совпадения через схему ИЛИ подключены на вход схемы задержки импульсов и на вычитающий вход сумматора, на второй вход которого подключен выход схемы задержки.
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения скорости вращения бесконтактного двигателя постоянного тока | 1977 |
|
SU662867A1 |
| Бесконтактный привод постоянного тока | 1975 |
|
SU655037A1 |
| Бесконтактный тахогенератор | 1981 |
|
SU949504A1 |
| Тахогенератор вентильного электродвигателя | 1981 |
|
SU966597A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Датчик положения ротора вентильного двигателя | 1978 |
|
SU748701A1 |
| Регулируемый ветнильный электродвигатель | 1977 |
|
SU684684A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Следящая система | 1975 |
|
SU545969A1 |
X
Фиг.2 N
