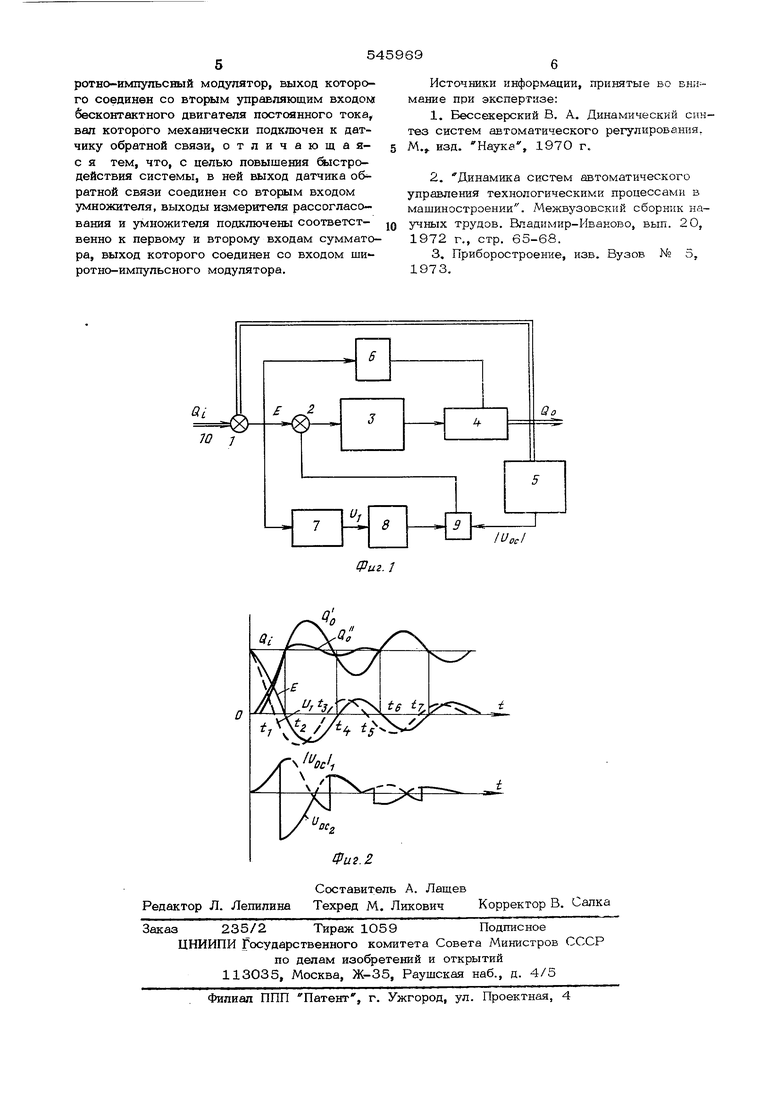
Изобретение относится к области автоматики, а именно к следящим электроприводам с бесконтактными двигателями постоянного тока, и может быть использовано для повышения быстродействия приводов. Известны следящие приводы, содержащие реверсивный датчик скорости, выполненный в виде асинхронного тахогенератора с демодулятором и широтно-импульсным модулятором, управляемый выпрямленным напряжением, которое получается путем вычитания сигнала реверсивной скоростной обратной связи из сигнала ощибки ll. Однако отмечается низкое быстродействие по сравнению со следящими приводами без обратной связи Известны также следящие приводы с бесконтактным двигателем постоянного тока (БДПТ), содержащие амплитудный канал с широтно-импульсным модулятором и канал .реверса, в который включается фазоопережающее (дифференцирующее) корректирующее устройство 2, Отмечается, однако, слабая помехозащищенность, потому что хорощий эффект коррекции достигается при большом фазовом опережении корректирующего устройства. Кроме того, системы работоспособны только для узкого диапазона частот. Следует также отметить, что некоторые типы входного воздействия, например син соидальное, системы на выходе воспроизводят с большими искажениями. Известна также следящая cHCTei ia с бесконтактным двигателем постоянного тока, содержащая сумматор, измеритель рассогласования, первый и второй входы которого механически соединены соответственно с валом бесконтактного - двигателя постоянного тока и задающим валом, выход тгзмерг теля рассогласования через блок реверса подключен к первому управляющему входу бесконтактного двигателя постоянного тока и через последовательно соединенные фазоопережающее звено и блок сигнатуры - к первому входу умножителя, широтно-т мпупьсный модулятор, выход которого соединен со вторым управляющим входом бесконтактного двигателя постоянного тока, ват которого механически подключен к датчику обратной связи З. В этой системе реверс осуществляется умножением сигнала сигнатуры на выходной сигнал нереверсивного, широгно-ии пульсного модулятора, при этом коррекция системы также осуществляется по каналу реверса, потому что сигнал сигнатуры формируется из разности сигнала рассогласова ния системы и напряжения реверсивного тахогенератора, предварительно пропущенного через фильтр и корректирующее устройство (дифференцирующее). Однако реализация такой коррекции встречает некоторые затруднения, поскольку в условиях, при которых обычно работают БДПТ, щеточные тахогенераторы постоянного тока не приемлемы из-за низкой надежности, асинхронные вследствие больщих габаритов и необходимости использования источников переменного напряжения, а применение синхронных тахогенераторов без сложных логических устройств невозможно, потому что их выход ной сигнал нереверсивный. Следует также отметить, что все перечисленные скорректированные следяшие приводы имеют меньшее быстродействие по сравнению с нескорректированными. Цель изобретения повышение быстродействия системы. Это достигается тем, что выход датчика обратной связи соединен со вторым входом умножителя, выходы измерителя рассогласования и умножителя под ключены соответственно к первому и второму входам сумматора, выход которого соединен со входом широтно-импульсного моду лятора. На фиг. 1 представлена структурная схе ма следящей системы на фиг. 2 - диаграм мы, поясняющие работу. Система содержит измеритель 1 рассогласования, сумматор 2, щиротно-импульсны модулятор 3 (ШИМ), бесконтактный двигатель 4 постоянного тока (БДПТ), датчик 5 обратной связи, блок 6 реверса, фазоопережаюшее звено 7, блок 8 сигнатуры, умно житель 9, U - напряжение фазоопережающего звена, UQJ. - напряжение датчика обратной связи, UQC напряжение обратной связи, Е - сигнал ошибки, - входной сигнал, Qjj - выходной сигнал, 1О задающий вал. Входной сигнал поступает на один из входов измерителя рассогласования 1, выход которого подключен на первый вход суммато ра 2. Выход сумматора 2 через ШИМ 3 подключен на вход коммутатора БДПТ 4, управляющий величиной скорости двигателя. На выходном валу двигателя укреплен датчик обратной связи 5. Выход измерителя 1, кроме того, подсоединяется на вход блока реверса 6, упрдаляющего направлением вращения БДПТ 4, и ко входу звена 7, выход которого через блок сигнатуры 8 подключен к первому входу умножителя 9. Ко второму входу умножителя 9 подсоединен выход датчика 5, а выход умножителя 9 подключен ко второму входу сумматора 2. Выходной вал двигателя соединен со вторым входом измерителя рассогласования 1. Работа следящей системы иллюстрируется диаграммами (фиг. 2). Следящая система с отключенной обратной связью (напряжение обратной связи ) при подаче на ее вход сигнала Q воспроизводит на выходе сигнал QQ . При этом сигнал ощибки системы представлен кривой , а напряжение датчика обратной связи 5 - кривой ( UQC. ). Напряжение с выхода звена 7 - U меняет знак в моt , tj, и т.д. менты времени - , i Умножая напряжение U на напряжение и формируем напряжение обратной свр. На участке О - i сигнал скорости складывается с сигналом ощибки , заставляя двигатель более интенсивно разгоняться. На участке t получаем торможение БДПТ, поскольку напряжение обратной связи вычитается из сигнала ощибки, В дальнейшем работа следящего привода аналогична. Подк;почение в контур следящего привода обратной связи, напряжение которой сформировано согласно предложенному алгоритму, улучшает динамику системы (выходной сигнал QQ ). Уменьщение перерегулирования в предложенной системе не сопровождается ухудщением быстродейстВИЯ. Напротив, соответствующим выбором коэффициента обратной связи можно получить быстродействие лучще, чем в системе без обратной связи. Кроме того, обладая преимуществами в динамике, предложенная следящая система использует простые и надежные синхронные тахогенераторы, обладающие лучщими весогабаритными характеристиками по сравнению с асинхронными и щеточными таходатчиками постоянного тока. Формула изобретения Следящая система, содержащая сумматор, измеритель рассогласования, первый и второй входы которого механически соединены соответственно с валом бесконтактного двигателя постоянного тока и задающим валом, выход измерителя рассогласования через блок реверса подключен к первому управляющему входу бесконтактного двигателя лостоянного тока и через последовательно соединенные фазоопережающее звено и блок сигнатуры - к первому входу умножителя, широтно-импупьсный модулятор, выход которого соединен со вторым управляющим входом бесконтактного двигателя постоянного тока, вал которого механически подключен к датчику обратной связи, отличающаяс я тем, что, с целью повышения бастродействия системы, в ней выход датчика о6 ратной связи соединен со вторым входом умножителя, выходы измерителя рассогласования и умножителя подключены соответственно к первому и второму входам сумматора, выход которого соединен со входом широтно-импульсного модулятора.
Источники информации, принятые во БНН-мание при экспертизе:
1.Бессекерский В. А. Динамический синтез систем автоматического регулирования.
М. изд. Наука, 1970 г.
2. Динамика систем автоматического управления технологическими процессами в машиностроении . Межвузовский сборник научных трудов. Владимир-Иваново, вып. 20, 1972 г., стр. 65-68.
3.Приборостроение, изв. Вузов № 5, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU788076A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Следящая система | 1978 |
|
SU763851A1 |
| Бесконтактная следящая система постоянного тока | 1975 |
|
SU525925A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1979 |
|
SU900255A1 |
| Серводин | 1986 |
|
SU1667000A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU525921A1 |
