1
Изобретение относится к медицинской технике, а именно к области протезирования и прсгтезостроения.
Известны распознающие устройства для управления механизмами и устройствами, содержащие усилители биопотенциалов, устройства для определения среднеквадратичной величины биоэлектрического сигнала, весовые резисторы, суммирующие усилители, детекторы, вентили и серводвигатели.
Однако для обучения таких устройств необходимо проводить расчет величины сопротивлений весовых резисторов для каждого инвалида в отдельности, что требу ет привлечения ЭВМ. Это ограничивает применение методов распознавания в практике протезирования.
С целью управления, например, многофункциональными протезами верхних конечностей и оперативного обучения системы определению биоэлектрических образов, действительных и фантомных движений, в ней установлены наборное поле, индикаторный блок, логические ячейки «И и «ИЛИ, усилители мощности, причем наборное поле выполнено в виде совокупности выходов блоков триггеров Шмнтта и входов логических ячеек «И, электрически связанных с логическими- ячейками «ИЛИ, выходы которых соединены с усилителями мощности сервоприводов-.
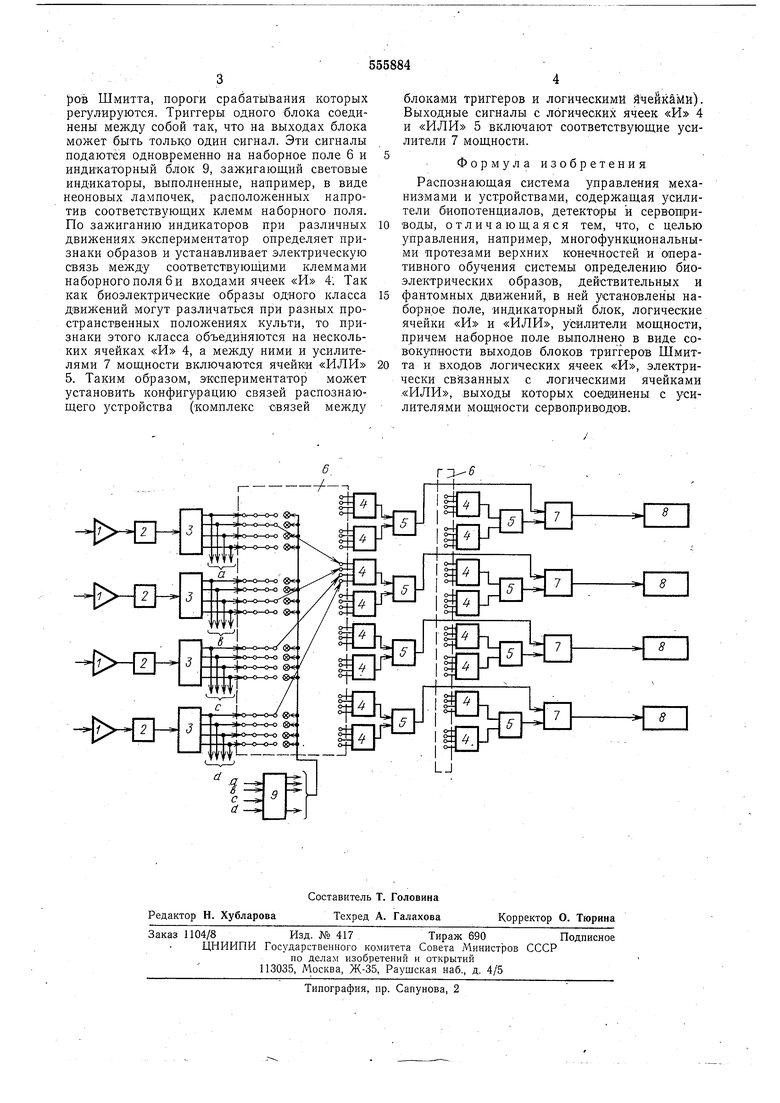
На чертеже представлена блок-схема предлагаемой распознающей системы управления механизмами и устройствами.
Распознающая система управления механизмами и устройствами содержит усилители 1 биопотенциалов, на выходе которых подключены детекторы 2, блоки 3 триггеров Шмитта, логические ячейки «И 4 и «ИЛИ 5, наборное поле б, выполненное в виде совокупности выходов блоков 3 триггеров Шмитта и входов логических ячеек «И, электрически связанных с логическими ячейками «ИЛИ 5, выходы которых соединены с усилителями 7 мощности сервоприводов 8, . и индикаторный блок 9. Причем триггеры Шмитта расположены в возрастающем порядке с затормаживанием триггеров с низщими порогами при возбуждении триггеров с высшими порогами срабатывания и дискретизацией огибающих биоэлектрических сигналов посредством сетчатки на число уровней, соответствующих потребному числу признаков биоэлектрических образов, группируемых на наборном поле 6.
Обучение и работа распознающей системы происходит следующим образом. Биоэлектрические сигналы от усеченных мыщц культи во время движения после усиления усилителями 1 биопотенциалов и детектирования детекторами 2 подаются на блоки.3 триггеров Шмитта, пороги срабатывания которых регулируются. Триггеры одного блока соединены между собой так, что на выходах блока может быть только один сигнал. Эти сигналы подаются одновременно на наборное поле 6 и индикаторный блок 9, зажигающий световые индикаторы, выполненные, например, в виде неоновых лампочек, расположенных напротив соответствующих клемм наборного поля. По зажиганию индикаторов при различных движениях экспериментатор определяет признаки образов и устанавливает электрическую связь между соответствуюп ими клеммами наборного поля 6 и входами ячеек «И 4; Так как биоэлектрические образы одного класса движений могут различаться при разных пространственных положениях культи, то признаки этого класса объединяются на нескольких ячейках «И 4, а между ними и усилителями 7 мощности включаются ячейки «ИЛИ 5. Таким образом, экспериментатор может установить конфигурацию связей распознающего устройства (комплекс связей между
блоками триггеров и логическими йчейк&Ми). Выходные сигналы с логических ячеек «И 4 и «ИЛИ 5 включают соответствующие усилители 7 мощности.
Формула изобретения
Распознающая система управления механизмами и устройствами, содержащая усилители биопотенциалов, детекторы и сервошриводы, отличающаяся тем, что, с целью управления, например, многофункциональными протезами верхних конечностей и оперативного обучения системы определению биоэлектрических образов, действительных и
фантомных движений, в ней установлены наборное поле, индикаторный блок, логические ячейки «И и «ИЛИ, усилители мощности, причем наборное поле выполнено в виде совокупности выходов блоков триггеров Шмитта и входов логических ячеек «И, электрически связанных с логическими ячейками «ИЛИ, выходы которых соединены с усилителями мощности сервоприводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез предплечья с биоэлектрическим управлением для детей | 1978 |
|
SU766594A1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| СИСТЕМА УПРАВЛЕИИЯ БИОЭЛЕКТРИЧЕСКИМИ ПРОТЕЗАМИ ВЕРХНИХ КОНЕЧИОСТЕЙ | 1970 |
|
SU278023A1 |
| Биолектрическая система управления протезом верхнейКОНЕчНОСТи | 1978 |
|
SU728232A1 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Устройство для управления биоэлектрическим протезом | 1983 |
|
SU1220657A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ С БИОЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ | 1973 |
|
SU396113A1 |
| ПРОТЕЗ ПЛЕЧА С БИОЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ | 1969 |
|
SU240176A1 |
| Устройство управления протезом нижней конечности | 1982 |
|
SU1041108A1 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
HMI
ими
