Изобретение относится к медицине, а именно к протезированию и протезостроению, и касается протезов нижних конечностей.
Известен протез нижней конечности, содержащий электропривод, механический аккумулятор, механизм зарядки и периодической разрядки аккумулятора, гильзу бедра, коленный шарнир, гильзу голени, коленостопный шарнир, искусственную стопу. Электропривод заряжает аккумулятор в течение 85-90% времени двойного шага, а в конце фазы опоры на протез аккумулятор, соединенный с искусственной стопой, осуществляет подошвенное сгибание стопы, ..что обеспечивает активное отталкивание протезом от опоры 1 .
Однако пользование таким протезом затруднено, поскольку протез работает как автомат с заданным временем зарядки и периодической разрядки аккумулятора, и в нем отвутствует управление временем начала активного отталкивания протезом от опоры и не обес.печивается предупреждением случаев неправильного или несвоевременного срабатывания аккумулятора протеза, осуществляющего отталкивание.
Наиболее близким к предлагаемому потехнической сущности является устройство управления движениями конечностей экзоскелетона, которое содержит последовательно соединенные, механический аккумулятор и блок механической передачи, а также исполнительный механизм с электроприводом и подключенные к его входу тактильный датчик и датчик накопленной аккумулятором энергии, вход которого соединен с выходом механического аккумулятора. Кроме того, устройство содержит программирующий блок, элемент сравнения, тазобедренный щарнир, искусственную стопу и электромагнитные муфты 2.
Однако известное устройство не обеспечивает активного отталкивания от опоры искусственной конечностью. Кроме того, в данном устройстве отсутствует управление таким параметром как время начала подачи энергии от аккумулятора в требуемый щарнир и не обеспечивается предупреждение случаев неправильного или несвоевременного срабатывания аккумулятора в усложненных условиях ходьбы, например, по неровной поверхности, скользкой дороге и т.п. Последнее объясняется тем, что тактильный датчик, подающий команду на подключение аккумулятора к требуемому щарниру, срабатывает по заданной программе только при снятии нагрузки с конечностИ независимо от условий ходьбы. Для того, чтобы организовать устойчивую ходьбу в усложненных условиях, инвалиду потребуется часто перестраивать программирующий блок, что .значительно затрудняет пользование таким устройством, так как не обеспечивает его оперативное управление.
Цель изобретения - повышение устойчивости ходьбы инвалида в усложненных условиях дороги.
Поставленная цель достигается тем, что в устройство управления протезом нижней конечности, содержащее последовательно соединенные механический аккумулятор и блок механической передачи, а также первым двум входам соответственно тактильный датчик и датчик накопленной аккумулятором энергии, вход которого соединен со вторым выходом механического аккумулятора, введены последовательно соединенные датчик биопотенциалов, усилитель напряжения, выпрямитель, фильтр, первый компаратор и первый усилитель мощности, последовательно соединенные второй компаратор, счетный триггер, второй усилитель мощности и механизм сцеплення-расцеп ленйя, включенный между выходом исполнительного механизма и вхо..а,ом механического аккумулятора,, причем первый вход второго компаратора соединен с выходом фильтра, вторые входы первого к второго
5 компаратора соединены соответстйенно с первой и второй шинами опорных напряжений, а выходы первого и второго усилителей мощности соединены соответственно с третьим и четвертым входами исполнительного механизма.
0 Кроме того, электропривод исполнительного механизма подключен к источнику питания через последовательно соединенные первый ключ и контакты перЕюго, второго и третьего реле, второй ключ подключен параллельно контактам первого реле, третий ключ подключен параллельно контактам второго реле, а контакты четвертого реле подключены параллельно последовательно соединенным контактам первого и второго реле.
0 При этом управляющий вход первого реле соединен с выходом первого усилителя мощности, управляющий вход второго реле - с выходом тактильного датчика, управляющий вход третьего реле - с выходом второго усилителя мощности, а управляющий вход четвертого реле - с выходом датчика накопленной аккумулятором энергии.
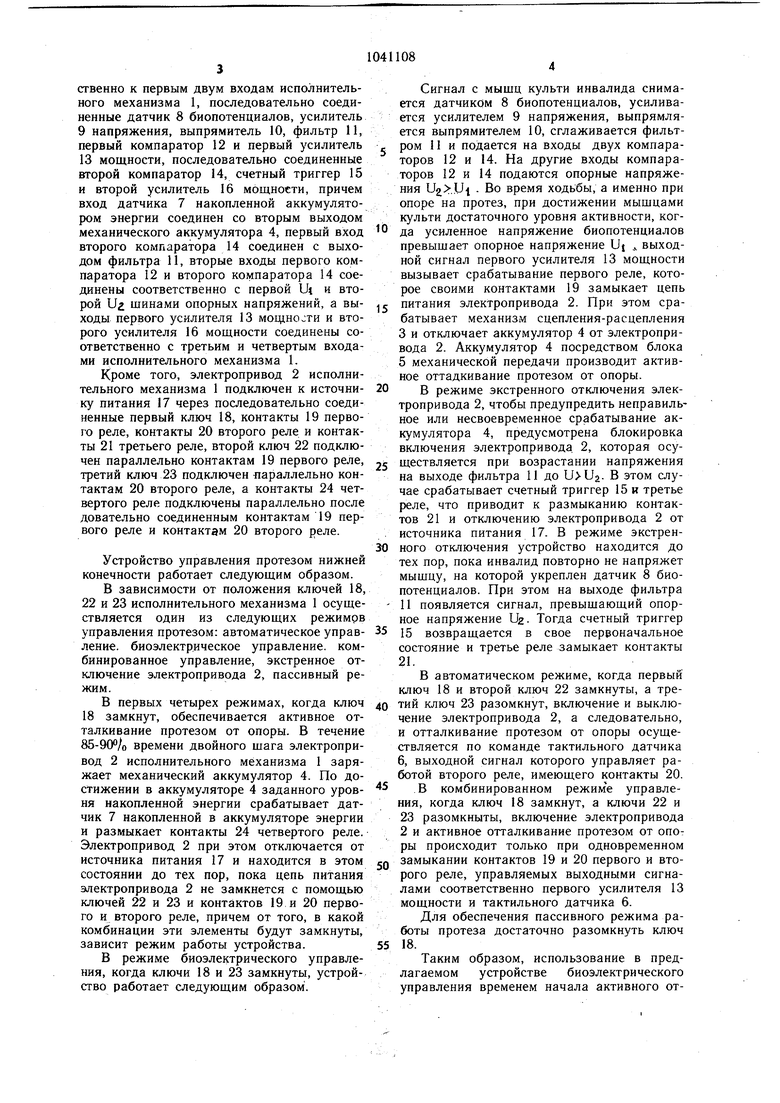
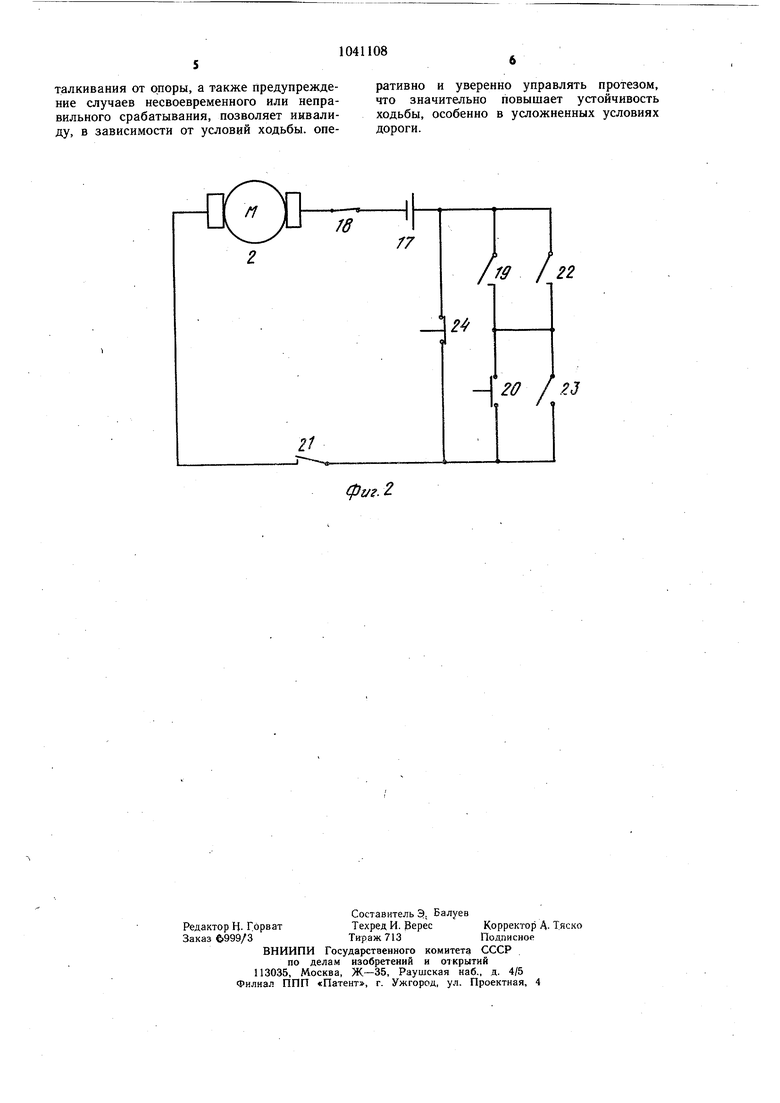
На фиг. 1 изображена структурная схема ус ройства управления протезом нижней конечности; на фиг. 2 - электрическая схеQ ма подключения электропривода исполнительного механизма к источнику питания..
Устройство содержит последовательно соединенные исполнительный механизм 1 с электроприводом 2, механизм 3 сдеплек.ия5 расцепления, механический аккумулятор 4 и блок 5 механической передачи, тактильный датчик 6 и датчик 7 накопленной аккумулятором энергии, подключенные соответственно к первым двум входам исполнительного механизма 1, последовательно соединенные датчик 8 биопотенциалов, усилитель 9 напряжения, выпрямитель 10, фильтр 11, первый компаратор 12 и первый усилитель 13 мощности, последовательно соединенные второй компаратор 14, счетный триггер 15 и второй усилитель 16 мощноети, причем вход датчика 7 накопленной аккумулятором энергии соединен со вторым выходом механического аккумулятора 4, первый вход второго компаратора 14 соединен с выходом фильтра 11, вторые входы первого компаратора 12 и второго компаратора 14 соединены соответственно с первой Ut и второй 1/2 шинами опорных напряжений, а выходы первого усилителя 13 мощности и второго усилителя 16 мощности соединены соответственно с третьим и четвертым входами исполнительного механизма 1.
Кроме того, электропривод 2 исполнительного механизма 1 подключен к источнику питания 17 через последовательно соединенные первый ключ 18, контакты 19 первого реле, контакты 20 второго реле и контакты 21 третьего реле, второй ключ 22 подключен параллельно контактам 19 первого реле, третий ключ 23 подключен параллельно контактам 20 второго реле, а контакты 24 четвертого реле подключены параллельно после довательно соединенным контактам 19 первого реле и контактам 20 второго реле.
Устройство управления протезом нижней конечности работает следующим образом.
В зависимости от положения ключей 18, 22 и 23 исполнительного механизма 1 осуществляется один из следующих режимов управления протезом: автоматическое управление. биоэлектрическое управление, комбинированное управление, экстренное отключение электропривода 2, пассивный режим.
В первых четырех режимах, когда ключ 18 замкнут, обеспечивается активное отталкивание протезом от опоры. В течение 85-90% времени двойного шага электропривод 2 исполнительного механизма 1 заряжает механический аккумулятор 4. По достижении в аккумуляторе 4 заданного уровня накопленной энергии срабатывает датчик 7 накопленной в аккумуляторе энергии и размыкает контакты 24 четвертого реле. Электропривод 2 при этом отключается от источника питания 17 и находится в этом состоянии до тех пор, пока цепь питания электропривода 2 не замкнется с помощью ключей 22 н 23 и контактов 19 и 20 первого и второго реле, причем от того, в какой комбинации эти элементы будут замкнуты, зависит режим работы устройства.
В режиме биоэлектрического управления, когда ключи 18 и 23 замкнуты, устройство работает следующим образом.
Сигнал с мышц культи инвалида снимается датчиком 8 биопотенциалов, усиливается усилителем 9 напряжения, выпрямляется выпрямителем 10, сглаживается фильтром 11 и подается на входы двух компараторов 12 и 14. На другие входы компараторов 12 и 14 подаются опорные напряжения U2.U| . Во время ходьбы, а именно при опоре на протез, при достижении мышцами культи достаточного уровня активности, когда усиленное напряжение биопотенциалов превышает опорное напряжение Uj выходной сигнал первого усилителя 13 мощности вызывает срабатывание первого реле, которое своими контактами 19 замыкает цепь питания электропривода 2. При этом срабатывает механизм сцепления-расцепления 3 и отключает аккумулятор 4 от электропривода 2. Аккумулятор 4 посредством блока 5 механической передачи производит активное оттадкивание протезом от опоры.
В режиме экстренного отключения электропривода 2, чтобы предупредить неправильное или несвоевременное срабатывание аккумулятора 4, предусмотрена блокировка включения электропривода, 2, которая осуществляется при возрастании напряжения на выходе фильтра 11 до . В этом случае срабатывает счетный триггер 15 и третье реле, что приводит к размыканию контактов 21 и отключению электропривода 2 от источника питания 17. В режиме экстренного отключения устройство находится до тех пор, пока инвалид повторно не напряжет мышцу, на которой укреплен датчик 8 биопотенциалов. При этом на выходе фильтра 11 появляется сигнал, превышающий опорное напряжение Ug. Тогда счетный триггер 15 возвращается в свое первоначальное состояние и третье реле замыкает контакты 21.
В автоматическом режиме, когда первый ключ 18 и второй ключ 22 замкнуты, а третий ключ 23 разомкнут, включение и выключение электропривода 2, а следовательно, и отталкивание протезом от опоры осуществляется по команде тактильного датчика 6, выходной сигнал которого управляет работой второго реле, имеющего контакты 20.
В комбинированном режиме управления, когда ключ 18 замкнут, а ключи 22 и 23 разомкныты, включение электропривода 2 и активное отталкивание протезом от опоры происходит только при одновременном замыкании контактов 19 и 20 первого и второго реле, управляемых выходными сигналами соответственно первого усилителя 13 мощности и тактильного датчика 6.
Для обеспечения пассивного режима работы протеза достаточно разомкнуть ключ 18.
Таким образом, использование в предлагаемом устройстве биоэлектрического управления временем начала активного отталкивания от опоры, а также предупреждение случаев несвоевременного или неправильного срабатывания, позволяет инвалиду, в зависимости от условий ходьбы, оперативно и уверенно управлять протезом, что значительно повышает устойчивость ходьбы, особенно в усложненных условиях дороги.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления биоэлектрическим протезом | 1983 |
|
SU1220657A1 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| Устройство для управления биоэлектрическим протезом плеча | 1985 |
|
SU1344351A1 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Протез нижней конечности | 1984 |
|
SU1342493A1 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475653A1 |
| Устройство для управления протезами нижних конечностей | 1985 |
|
SU1447366A1 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475652A1 |
| Протез плеча | 1989 |
|
SU1666104A1 |
1; УСТРОЙСТВО УПРАВЛЕНИЯ ПРОТЕЗОМ НИЖНЕЙ КОНЕЧНОСТИ, содержащее последовательно соединенные механический аккумулятор и блок механической передачи, а также исполнительный механизм с электроприводом и подключенные к его первым входам соответственно тактильный датчик и датчик накопленной аккумулятором энергии, вход кбторого соединен со вторым выходом механического аккумулятора, отличающееся тем, что, с целью повышения устойчивости ходьбы инвалида в усложненных условиях дороги, в него введены последовательно соединенные датчик бнопотенцналов, усилитель напряжения, выпрямитель, фильтр, первый компаратор и первый усилитель мощности, последовательно соединенные второй компаратор, счетный триггер и второй усилитель мощности, и механизм сцепления-расцепления, включенный между выходом исполнительного механизма и входом механического аккумулятора, причем первый вход второго компаратора соединен с выходом фильтра, вторые входы первого и второго компараторов соединены соответственно с первой и второй шинами опорных напряжений, а выходы первого и второго усилителей мощности соединены соответственно с третьими и четвертым вхосоответственно с третьим и четвертым входами исполнительного механизма. i 2. Устройство по п. 1, отличающееся тем, что электропривод исполнительного (Л механизма подключен к источнику питания через последовательно соединенные первый ключ и контакты первого , второго и третьего реле, второй ключ подключен параллельна контактам первого реле, третий ключ подключен параллельно контактам второго реле, а контакты четвертого реле подключены параллельно последовательно соединенным контактам первого и второго реле. 00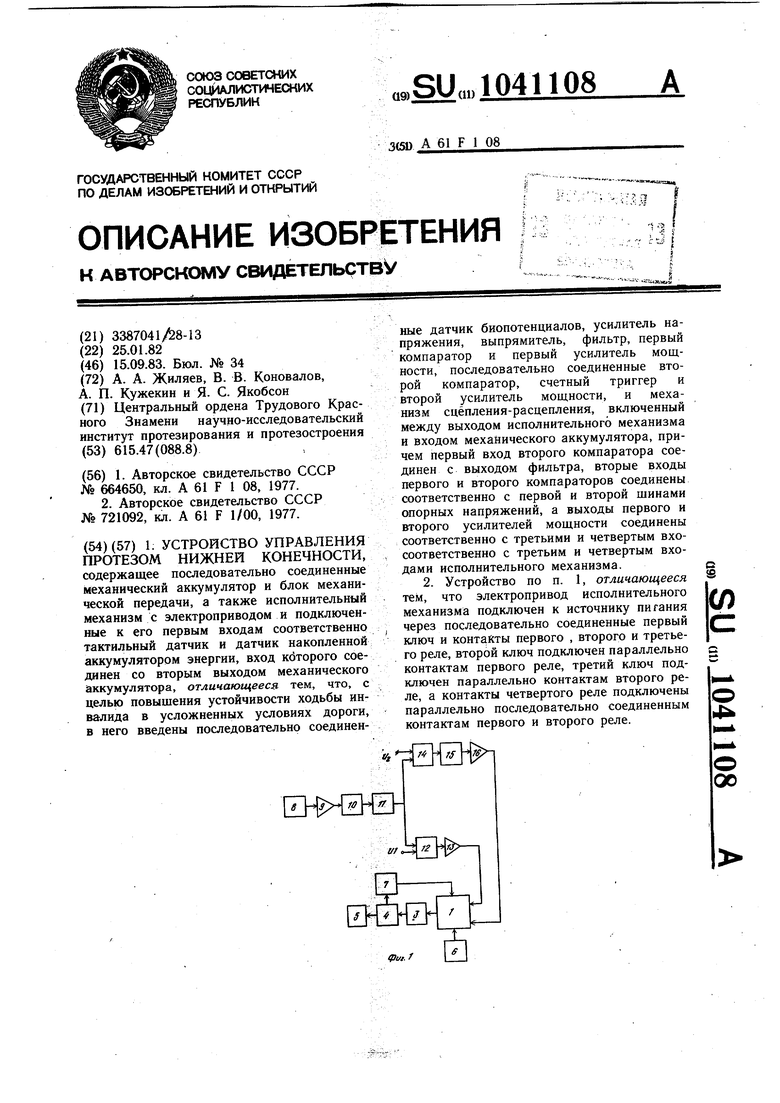
77
Л7
22
Н/ Л
фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Протез нижней конечности | 1977 |
|
SU664650A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления движениями конечностей экзоскелетона | 1977 |
|
SU721092A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
