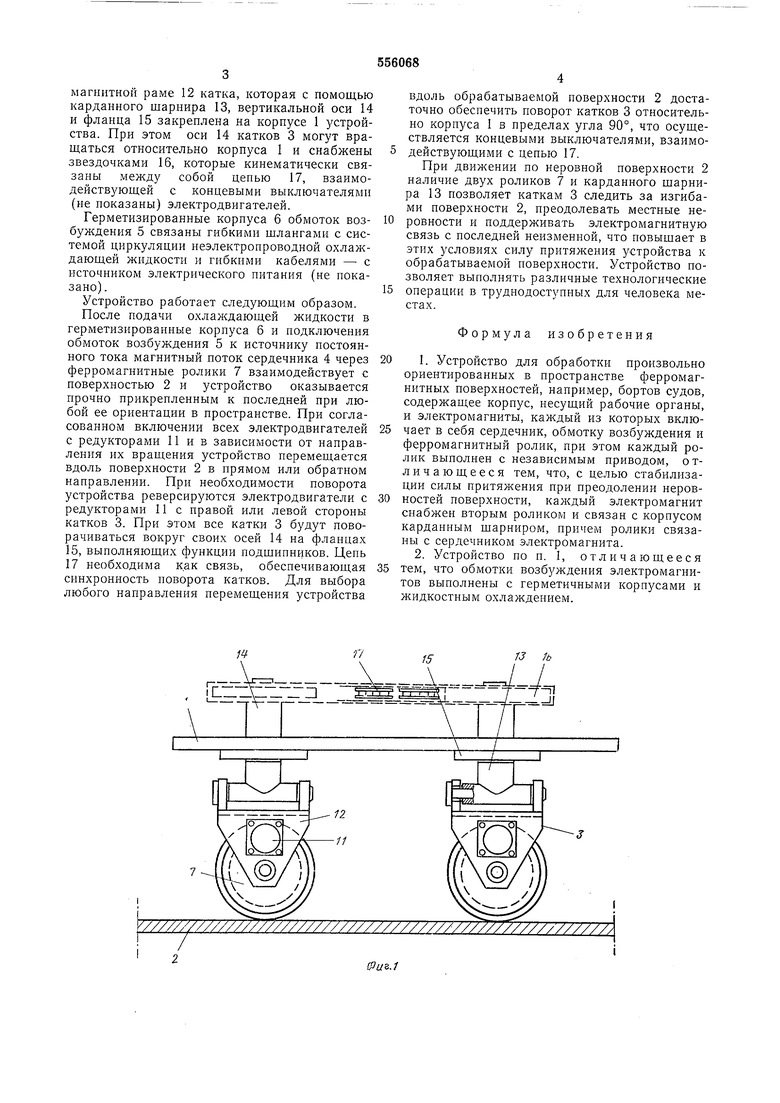
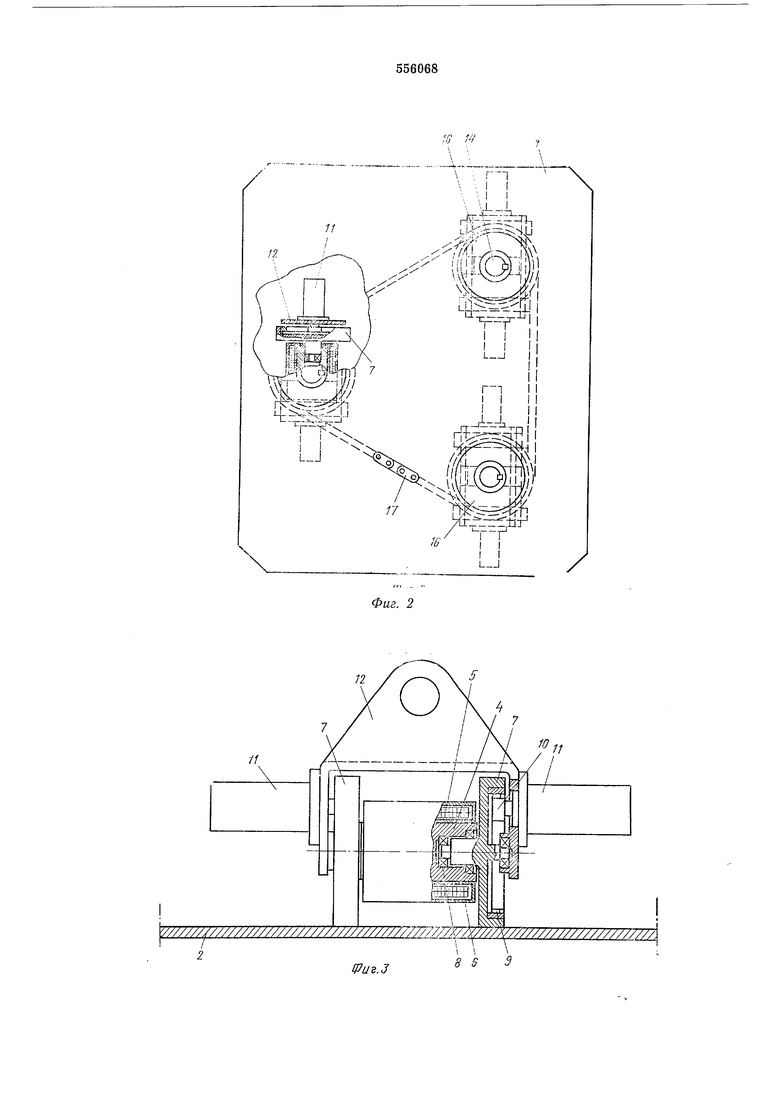
магнитной раме 12 катка, которая с помощью карданного шарнира 13, вертикальной оси 14 и фланца 15 закреплена на корпусе 1 устройства. При этом оси 14 катков 3 могут вращаться относительно корпуса 1 и снабжены звездочками 16, которые кинематически связаны между собой цепью 17, взаимодействующей с концевыми выключателями (не показаны) электродвигателей. Герметизированные корпуса 6 обмоток возбуждения 5 связаны гибкими шлангами с системой циркуляции неэлектропроводной охлаждающей жидкости и гибкими кабелями - с источником электрического питания (не показано). Устройство работает следующим образом. После подачи охлаждающей жидкости в герметизированные корпуса 6 и подключения обмоток возбуждения 5 к источнику постоянного тока магнитный иоток сердечника 4 через ферромагнитные ролики 7 взаимодействует с поверхностью 2 и устройство оказывается прочно прикрепленным к последней при любой ее ориентации в пространстве. При согласованном включении всех электродвигателей с редукторами 11 и в зависимости от направления их вращения устройство перемещается вдоль поверхности 2 в прямом или обратном направлении. При необходимости поворота устройства реверсируются электродвигатели с редукторами 11 с правой или левой стороны катков 3. При этом все катки 3 будут поворачиваться вокруг своих осей 14 на фланцах 15, выполняющих функции подшипников. Цепь 17 необходима как связь, обеспечивающая синхронность поворота катков. Для выбора любого направления перемещения устройства вдоль обрабатываемой поверхности 2 достаточно обеспечить поворот катков 3 относительно корпуса 1 в пределах угла 90°, что осуществляется концевыми выключателями, взаимодействующими с цепью 17. При движении по неровной поверхности 2 наличие двух роликов 7 и карданного шарнира 13 позволяет каткам 3 следить за изгибами поверхности 2, преодолевать местные неровности и поддерживать электромагнитную связь с последней неизменной, что повышает в этих условиях силу притяжения з стройства к обрабатываемой поверхности. Устройство позволяет выполнять различные технологические операции в труднодоступных для человека местах. Формула изобретения 1.Устройство для обработки произвольно ориентированных в пространстве ферромагнитных поверхностей, например, бортов судов, содержащее корпус, несущий рабочие органы, и электромагниты, каждый из которых включает в себя сердечник, обмотку возбуждения и ферромагнитный ролик, при этом каждый ролик выполнен с независимым приводом, о тличающееся тем, что, с целью стабилизации силы притяжения при преодолении неровностей поверхности, каждый электромагнит снабжен вторым роликом и связан с корпусом карданным шарниром, причем ролики связаны с сердечником электромагнита. 2.Устройство по п. 1, отличающееся тем, что обмотки возб)окдения электромагнитов выполнены с герметичными и жидкостным охлаждением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1984 |
|
SU1362241A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| Швартовное устройство | 1985 |
|
SU1310281A1 |
| Устройство для переработки электрических кабелей в утиль | 1989 |
|
SU1705935A1 |
| Устройство для подъема и перемещения транспортного средства | 1987 |
|
SU1491805A1 |
| ВОЛНОВОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2289186C2 |
| Электромагнитный механизм для перемещения по произвольно ориентированным ферромагнитным поверхностям | 1975 |
|
SU556069A1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ И ПОВОРОТНЫМ УСТРОЙСТВОМ | 2023 |
|
RU2816413C1 |
| ГЕНЕРАТОР ЭЛЕКТРОСНАБЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2001 |
|
RU2185980C1 |
| Стенд для испытаний рулевых механизмов | 1988 |
|
SU1548693A1 |
/J Л
