Изобретение относится к оборудованию для подъема и дальнейшего перемещения автомс Гчсчн н целях ремонта
и установки в заданное положение на ограниченных площадях гаражей и автостоянок.
Целью изобретения является повышение надежности работы устройства.
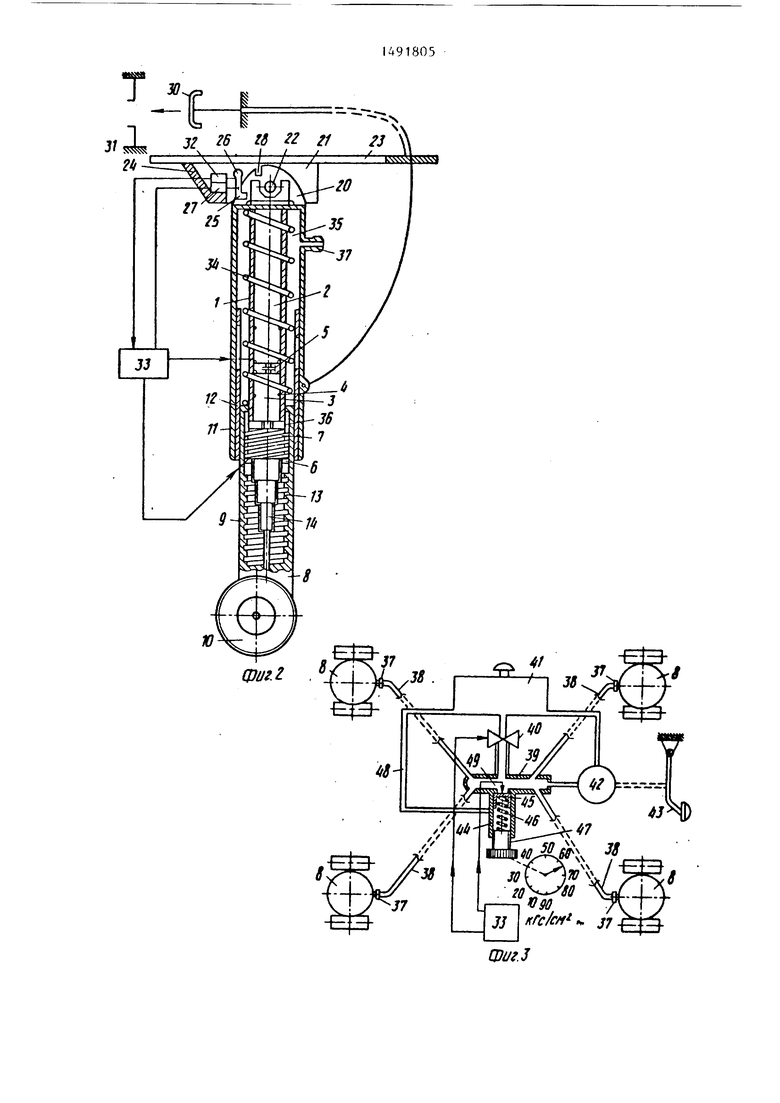
На фиг.1 приведено устройство в исходном положении, общий вид, разрез; на фиг,2 - то же, в рабочем положении, общий вид, разрез; на фиг.3 принципиальная схема соединения четырех устройств для подъема транспортного средства; на фиг,4 - принципиальная схема системы управления че- тьфех устройств для подъема транспортного средства.
Устройство состоит из полого цилиндрического корпуса 1, в котором неподвижно установлены кинематически связанные электродвигатель 2 и замедляющий редуктор 3 при помощи установочных штифтов 4. Вал электродвигателя 2 соединяется с валом редуктора 3 муфтой 5. Выходной, вал замедляющего редуктора 3 через электромагнитную муфту 6 связан с шестерней 7 привода подъемника 8, состоящего из телескопической стойки 9 и опорных катков 10, Телескопическая стойка 9 установлена скользящей посадкой между цилиндрическим корпусом 1 и кожухом 11 на направляющих 12, которые в верхней части имеют отрезок спиральной формы, а в нижней - прямолинейной формы и представляет собой выемки указанной формы в телескопической стойке 9 и выступы в кожухе 11, установленные со скользящей посадкой. Протяжённость спирального участка направляющих 12 в верхней части имеет величину, позволяющую осуществлять поворот подъемника 8 на 90 вокруг своей оси одновременно с вертикальным перемещением.
Внутри телескопическая стойка 9 имеет прямоугольную винтовую резьбу 13, в зацепление с которой входит спиральная шестерня 7, Внутри последней установлен шлицевый диск электромагнитной муфты 6, связывающий шестерню 7 с валом редуктора 3 при обесточенной обмотке электромагнитной муфты 6 и связьшающей вал редуктора 3 с телескопическим шлицевым валом червяка 14 при подаче напряжения на электромагнитную муфту 6, Червяк 14 установлен в корпусе подъемника 8 на подшипнике 15 и связан с шестерней 16 привода опорных катков 10, которые состоят из ступиц 17, напрессованных на ось 18, и армированных колец 19 из профилированной резины. Суммарная площадь колец
0
5
0
5
0
5
0
5
0
5
определяется весом поднимаемого автомобиля и для легковых автомобилей
Г)
не превышает 12 см на асфальто-бе- тонном покрытии.
Цилиндрический корпус 1 жестко соединен с кожухом 11 и имеет проушину 20, подвижно установленную между кронштейнами 21 на оси 22, Кронштейны 21 приварены к несущему корпусу 23 автомобиля и соединены между собой скобой 24 для увеличения прочности, Между кронштейнами 21 подвижно установлен фиксатор 25 на оси 26, На скобе 24 закреплен электромагнит 27, связанный с фиксатором 25, который при попадании своим выступом в выемки 28 на проушине 20 запирает ее от возможных поворотов на оси 22, Кожух 11 с проушиной 20 имеют тро совый привод установки подъемника в горизонтальное транспортное положение, состоящий из троса 29, приводной ручки 30 с защелками 31,
Положение фиксаторов 25 контролируется концевыми выключателями 32, которые связаны через систему 33 управления с электродвигателем 2, электромагнитной муфтой 6 и электромагнитами 27,
Между цилиндрическим корпусом 1 и телескопической стойкой 9 установлена пружина 34 в полости 35, которая отделена от полости 36 в верхней части телескопической стойкой 9 и снабжена штуцером 37, Штуцеры 37 нескольких подъемников 8 соединяются трубопроводами 38 с коллектором 39, к которому подключен через управляемый вентиль 40 бак 41 с гидромаслом и гидронасос 42, например, с ножным приводом 43, Коллектор 39 снабжен регулятором 44 давления, который состоит, например, из поршня 45 с пружиной 46, ручки 47 со шкалой (кг/см) перепускного трубопровода 48, Поршень 45 регулятора 44 давления кинематически связан с концевым выключателем 49, который подключен к системе 33 управления вместе с упомянутыми управляемым вентилем 40, фиксатором 25, электромагнитной муфтой 6 и электродвигателем 2,
Система 33 управления (фиг. 4) состоит из логической микросхемы И 50, соединенной по входам с концевыми выключателями 32 и со светодиодами 51 с ограничивающим ток резистором 52, а по выходу - с усилителем мощ
НОСТИ 53 и обмоткой реле 54, контакты 55 которого коммутируют цепь +12 В на тумблеры 56-60.
Устройство работает следующим образом.
Водитель тумблером 56 включает через систему 33 управления питание электромагнитов 27, которые прекращают фиксацию проушин 20 с подъемниками 8 в горизонтальном транспортном положении за счет выхода фиксаторов 25 из выемок 28 проушин 20. После этого водитель снимает ручку 30 тросового привода подъемников 8 с защелок 31 и отпускает ее вниз. При этом четьфе подъемника, расположенные на универсальных кронштейнах 21 на корпусе автомобиля, под действием собственного веса занимают вертикальное рабочее положение, поворачиваясь на осях 22, установленных в кронштейнах 21 на корпусе 23 автомобиля .
Водитель через устройство 33 уп- равления выключает питание электромагнитов 27, которые под действием возвратных пружин устанавливают фиксаторы 25 в выемки 28 проушин 20, устраняя возможные перемещения емников 8 на осях 22 в режиме работы. При этом срабатывают концевые выключатели 32. Если все четьп: е фиксатора 25 вошли в выемки проушин 20 и надежно удерхо1вают их, то включается электродвигатель 2, с вала которого при выключенной электромагнит- Чюй муфте 6 крутящий момент через редуктор 3 передается на шестерню 7.
портное продольное по1тожение на корпусе транспортного средства, принять поперечное положение относительно корпуса автомобиля (фиг.2). Изменение расположе шя опорных катков позволяет обеспечить автомобилю максимальный клиренс (дорожный просвет) в транспортном положении и заданное
10 направление бокового перемещения автомобиля в рабочем положении.
При максиматьном выходе телескопических стоек 9 вниз (фиг,2) вес автомобиля переносится на опорные
15 катки 10, которые неподвижно фиксируются от вращения на осях 18 червяком 14, и поэтому автомобиль может удерживаться на катках при небольших уклонах поверхности дороги.
20 Подвеска автомобиля этом разгружается и основные колеса зависают на небольшом расстоянии от поверхности дороги. При этом телескопический шлицевый вал червяка 14 из
25 исходного положения (фиг,1) переходит в рабочее положение (фиг. 2), удлиняясь за счет скольжения телескопических валов друг относительно друга, в то же время оставаясь кине30 матически соединенными между собой за счет пшицевых соединений и связанными с червяком 14 редуктора привода катков 10. При этом пружина 34, находящаяся в исходном положении
У (фиг.1) в сжатом состояНИИ,расширяется за счет упругих сил и, воздействуя на телескопическую стойку 9, способствует более быстрому ее вы- движению в рабочее положение (фиг.2)
Это происходит потому, что при вьпчлю- 40 электродвигателем 2 с меньшими затратами электроэнергии. Через открытый унравляемьш вентиль 40 из бака 41 по трубопроводам 38 в полость 35 каждого подъемника поступает 1видромасло. 45 После того, как телескопические стойки 9 всех четьфех подъемников 8 займут нижнее положение и шестерни 7 выйдут из винтовой резьбы 13 в полость 36, водитель тумблером 59 выключает управляемый вентиль 40, который закрывается. Ручкой 47 по шкапе давления (кг/см) водитель устанавливает величину необходимого давления в коллекторе 39 с учетом массы транспортного средства и перевозимого груза. Затем гидронасосом 42,
ченной обмотке электромагнитной муфты 6 верхний ее диск, снабженный радиальными шлицами, входит в зацепление со шлицами на внутренней поверхности шестерни 7 под действием упругих элементов. Крутящий момент передается с вала редуктора 3 через муфту 6 ria шестерню 7. Поэтому при вращении шестерни 7.телескопическая стойка 9 перемещается вниз, скользя между цилиндрическим корпусом 1 и кожухом 11 по направляющим 12, которые имеют в верхней части отрезок спиральной формьц а в нижней части - прямолинейной формы, поэтому телескопическая стойка 9 в начальной фазе движения вниз одновременно поворачивается вокруг своей оси на 90 . Это позволяет опорным каткам 10, занимавшим транс50
55
например, с ножным приводом из бака 41 в коллектор 39 подается дополнительная порция гидромасла, которая
портное продольное по1тожение на корпусе транспортного средства, принять поперечное положение относительно корпуса автомобиля (фиг.2). Изменение расположе шя опорных катков позволяет обеспечить автомобилю максимальный клиренс (дорожный просвет) в транспортном положении и заданное
0 направление бокового перемещения автомобиля в рабочем положении.
При максиматьном выходе телескопических стоек 9 вниз (фиг,2) вес автомобиля переносится на опорные
5 катки 10, которые неподвижно фиксируются от вращения на осях 18 червяком 14, и поэтому автомобиль может удерживаться на катках при небольших уклонах поверхности дороги.
0 Подвеска автомобиля этом разгружается и основные колеса зависают на небольшом расстоянии от поверхности дороги. При этом телескопический шлицевый вал червяка 14 из
5 исходного положения (фиг,1) переходит в рабочее положение (фиг. 2), удлиняясь за счет скольжения телескопических валов друг относительно друга, в то же время оставаясь кине0 матически соединенными между собой за счет пшицевых соединений и связанными с червяком 14 редуктора привода катков 10. При этом пружина 34, находящаяся в исходном положении
(фиг.1) в сжатом состояНИИ,расширяется за счет упругих сил и, воздействуя на телескопическую стойку 9, способствует более быстрому ее вы- движению в рабочее положение (фиг.2)
например, с ножным приводом из бака 41 в коллектор 39 подается дополнительная порция гидромасла, которая
увеличивает давление в коллекторе 39 и в полостях 35 до установленной величины. Величина давления на шкале регулятора 44 калибруется таким образом, что с учетом массы автомобиля и перевозимого груза в полости 35 создается давление, немного превышающее фактическое удельное давление транспортного средства на подъем- |Нике 8, поэтому телескопическая стойка 9 дополнительно вьщвигается, и шестерня 7 располагается в средней части полости 36. О достижении заданного давления в полостях 35 подъемников водитель информируется сигналом выключения светодиода 51 (У 5) концевым выключателем 49 при нажатии на привод 43 гидронасоса 42. Затем водитель через систему 33 управления включает питание электромагнитной муфты 6. При этом крутящий момен с электрического мотора 2 передается через редуктор 3 на муфту 6, а с нее - через телескопический пшицевый вал червяка 14 на шестерню 16 привода опорных катков 10, которые, равномерно вращаясь, перемещают автомобиль в боковом направлении налево или направо в зависимости от полярности напряжения +12 В, поданного тумблером 60 системы 33 управления на электрический мотор 2.
Система управления работает следующим образом.
При надежной фиксации всех, например четырех подъемников в рабочем положении происходит срабатьша- ние всех, например четырех;концевых выключателей 32, через которые уровень напряжения логической 1 подается на светодиоды 51 (У 1 - У 4), выполняющих световую индикацию исправности системы фиксации подъемников, и на входы микросхемы И 50. С выхбда микросхемы И логическая 1 поступает на усилитель 53 мощности, который включает реле 54, а оно своими контактами 55 коммутирует цепь +12 В на тумблер 57 включения электродвигатели 2, тумблер 60 изменения направления вращения электродвигателя 2 и тумблер 58 включения электромагнитной муфты. Включение электромагнитов 27 фиксаторов 25 производится тумблером 56.
Если хотя бы один из подъемников 8 не зафиксирован в рабочем положении, что может-вызвать неустой0
5
0
5
0
5
0
5
0
5
чивость автомобиля, то с микросхемы И на усилитель 53 мощности выдается логический О, который оставляет реле 54 в выключенном положении, когда через его контакты 55 не выдается +12 В на управляющие тумблеры. Светодиоды при этом указывают номер несработавшего фиксатора. Водитель повторно тpocoвьп 1 приводом устанавливает данный подъемник в рабочее положение, когда сработает его фиксатор.
Работа устройства при выводе автомобиля со стоянки происходит в обратной последовательности.
При движении одного или нескольких опорных катков 10 по неровности дороги телескопические стойки 9 указанных подъемников В перемещаются в кожухе 11. При этом гидромасло перетекает по гидропроводам 38, перераспределяясь между полостями 35 подъемников 8, демпфируя совместно с пружинами 34 вибрации и удары.Так же демпфирующим элементом является поршень 45 с пружиной 46, которые гасят вибрации и удары, передаваемые гидромаслом через коллектор 39, что повьш1ает надежность работы устройства и быстродействие за счет устранения перегрузок и поломок деталей подъемника и повышения скорости передвижения, вывешенного на емниках автомобиля по неровной дороге. В исходное состояние устройство возвращается следующим образом.
Тумблером 58 водитель выключает электромагнитную муфту 6 и тумблерами 57 и 60 включает электродвигатель 2 в направлении вдвижения телескопической стойки 9 в кожух 1 Т.Тумблером 59 включается управляемый вентиль 40, который открывается и под действием веса автомобиля с грузом гидромасла вытесняется из полостей 35 подъемников в бак 41. Телескопическая стойка 9 вдвигается в кожух 11 и винтовая резьба 13 входит в зацепление с шестерней 7. Электродвигатель 2 через редуктор 3 и электромагнитную муфту 6 передает усилия на шестерню 7, которая поднимает телескопическую стойку 9 в верхнее исходное положение, сжимая пружину 34 и вытесняя остатки гидромасла из полости 35 в бак 41.
Для промьшшенного использования изобретения необходим окончательный
этап опытных работ с включением в план освоения предприятия изготовителя. Суммарный положнтельный эффект, полученный при испытании модели опытного образца устройства, достаточно высок и определяется не только повышением надежности и быстродействия работы устройства за счет использования механизма демпфирования вибрации и ударов и механизма равномерного распределения нагрузки между несколькими подъемниками, но и расширением возможностей использования устройства на дорогах с неровностями.
Формула изобр етения
1. Устройство для подъема и перемещения транспортного средства, содержащее четыре вьщвижных стойки, каждая из которых включает в себя полый цилиндрический корпус, закрепленный с возможностью поворота на транспортном средстве, смонтированную в корпусе полую выдвижную секцию с внутренней резьбой, закрепленные в корпусе и кинематически связанные между собой электродвигатель, редуктор, электроуправляемую муфту и винт для зацепления с выдвижной секцией, фиксаторы рабочего и транспортного положений стойки, систему управления, включающую в себя логический элемент И, входы которого связаны через конечные выключатели, взаимодействующие с фиксаторами, выход подключен к реле управления электромагнитом фиксатора, параллельно которому подключены выключатели цепей питания упомянутых муфты и тродвигателя, отличающее- 0 с я тем, что, с целью повышения надежности, оно снабжено механизмом равномерного распределения нагрузки и демпфирования вибраций, включающим в себя пружины, каждая из кото- 5 рых размещена в полости корпуса между вьодвижной секцией и корпусом, во внутренней стенке этой секции выполнена цилиндрическая проточка диаметром, большим наруткного диаметра вин- 0 та, бак с гидрожидкостью, сообщенный параллельно установленными гидронасосом и электроуправляемым вентилем с коллектором, сообщенным с полостями корпусов стоек, напорньй 5 гидроклапан со шкалой настройки, подключенный к коллектору, причем вентиль подключен параллельно выключателям.
Q 2. Устройство по п. 1, отличающееся тем, что оно снабжено световой индикацией со свето- диодом, связанным с конечным выключателем, установленным в напорном гидроклапане.
50,
Ik
32 2В 28
22 21 ;
W
uti
-, jrl J. f f /





| название | год | авторы | номер документа |
|---|---|---|---|
| Автолет | 2021 |
|
RU2768060C1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| АВТОМОБИЛЬНОЕ ПАРКОВОЧНОЕ УСТРОЙСТВО | 2012 |
|
RU2489282C2 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 2001 |
|
RU2188920C1 |
| Режущий аппарат косилки | 1985 |
|
SU1301338A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| ПОДКАТНОЙ АВТОМОБИЛЬНЫЙ ПОДЪЕМНИК (ВАРИАНТЫ) | 2023 |
|
RU2804714C1 |
| Самоходная машина для внесения минеральных удобрений | 1987 |
|
SU1653582A1 |
| Лесозаготовительная машина | 1975 |
|
SU533358A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |


Изобретение относится к подъемно-транспортным средствам, может быть использовано при необходимости подъема автомобиля, например для ремонта или перемещения в гараже. Цель изобретения - повышение надежности работы устройства. Устройство для подъема транспортного средства содержит цилиндрический корпус, кинематически связанные между собой электродвигатель, редуктор, электромагнитную муфту, выдвижную телескопическую стойку с опорными катками и раздаточным редуктором, приспособление для крепления корпуса подъемника к транспортному средству с фиксатором рабочего и транспортного положения и систему управления. Устройство снабжено механизмом демпфирования вибраций и механизмом равномерного распределения нагрузки между несколькими подъемниками, причем механизм демпфирования вибраций состоит из пружины в полости, расположенной между цилиндрическим корпусом и выдвижной телескопической стойкой, а механизм равномерного распределения нагрузки - из трубопроводов, соединяющих указанные полости нескольких подъемников между собой коллектором, к которому подключены через управляемый вентиль бак с гидромаслом и гидронасос, а коллектор снабжен регулятором давления со шкалой и концевым выключателем, подключенным к системе управления вместе с упомянутыми управляемым вентилем, фиксатором, электромагнитной муфтой и электродвигателем. Новым в устройстве является наличие упругого элемента, размещенного в корпусе между выдвижной секцией и корпусом, выполненного в виде пружины с целью демпфирования колебаний выдвижной секции, и механизма равномерного распределения нагрузки, включающего в себя бак с гидрожидкостью, гидронасос, управляемый вентиль, конечный выключатель, коллектор с регулятором давления, сообщающийся с баком и с полостями стоек, причем конечный выключатель, кинематически связанный с регулятором, включен в цепь световой индикации. 1 з.п.ф-лы, 4 ил.
Шиг.З
гГ/«
k./
51
77777
56
55
т
| Устройство для подъема транспортного средства | 1982 |
|
SU1025548A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
