1
Изобретение относится к технике управления электроприводами постоянного тока установок типа шахтных подшипников с реверсированием привода по цепи возбуждения двигателя.
Известно устройство для управления электроприводом постоянного тока с реверсированием по цепи возбуждения, в котором с целью обеспечения плавности переходного процесса при реверсировании момента двигателя в «мертвое время на задатчик скорости осуществляется воздействие, в результате этого рассогласование в системе регулирования скорости сводится к минимуму. Для осуществления указанного воздействия вход интегратора задатчика скорости соединен с выходом датчика тока двигателя.
Иедостатком этого устройства управления является неточная обработка заданной тахограммы. Воздействие на задатчик скорости приводит к тому, что угловое расстояние, проходимое якорем двигателя от момента подачи команды на торможение до момента остановки двигателя, не определяется однозначно заданной тахограммой движения, но зависит также от трения в механизме привода и других факторов. Это обстоятельство не имеет значения для приводов таких механизмов, как прокатный стан, но делает этот привод непригодным для шахтных подъемных установок, от
которых требуется точная обработка заданной тахограммы, необходимая для остановки подъемного сосуда на заданном уровне.
Известно также устройство для управления электроприводом по системе Г-Д с двухзонным регулированием скорости, в котором реверсирование осуществляется изменением полярности напряжения на якоре, а с целью улучшения динамики и повышения точности поддержания скорости вход регулятора возбуждения двигателя подключен к выходу регулятора возбуждения генератора, служащего для изменения напряжения па якоре двигателя.
Недостатком этого устройства является необходимость в реверсивном преобразователе большой мощности (здесь генератор с реверсивным управлением), включаемого в цепь якоря двигателя, а также трудности примепения такого привода для установок типа шахтпых подъемников.
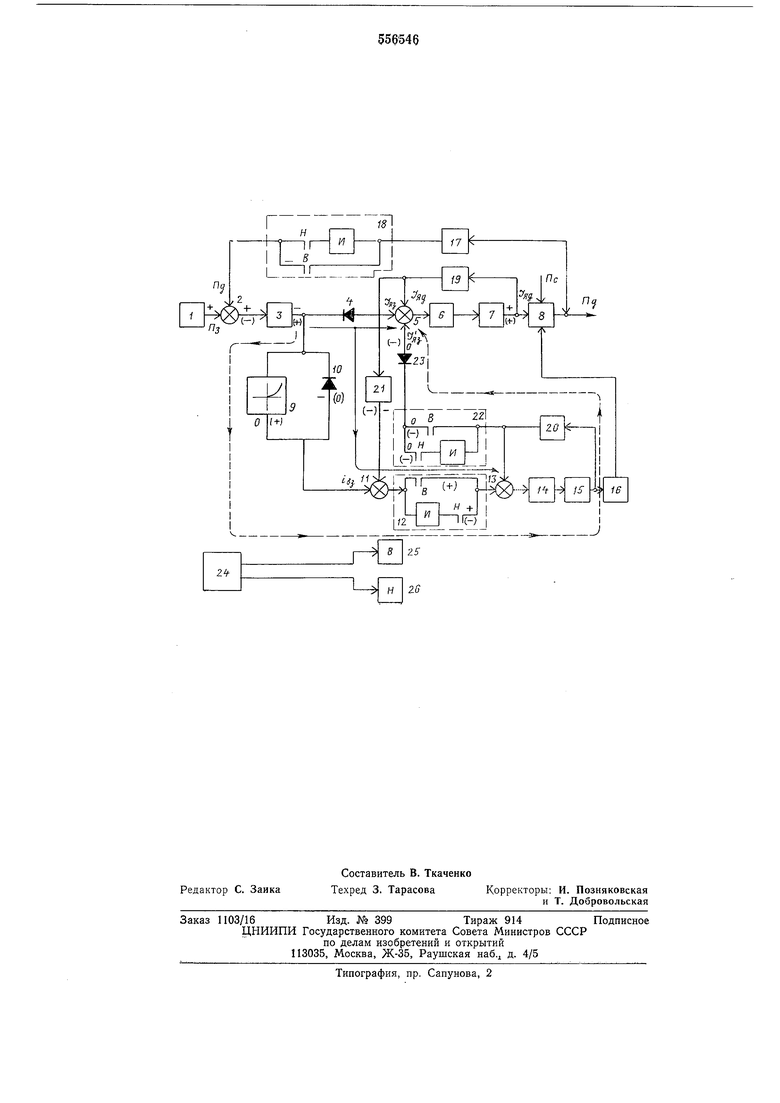
Наиболее близким к предлагаемому по технической сущности является зстройство для управления электроприводом постоянного тока шахтной подъемной з становки, содержащее нереверсивный тиристорный преобразователь в цепи якоря двигателя, реверсивный тиристорный преобразователь в цепи возбуждения двигателя, автоматические регуляторы скорости, тока якоря и тока возбуждения. В указанном устройстве регулятору скорости подчинены регулятор тока якоря и регулятор тока возбуждения двигателя. Регуляторы тока якоря и тока возбуждения двигателя имеют общий входной сигнал и общий объект регулирования (электродвигатель) иа всех участках тахограммы движения привода. Структурная схема системы автоматического управления двигателем в процессе работы не изменяется. Это устройство при правильной его настройке обеспечивает точную отработку заданной тахограммы, плавное движение подъемного сосуда и отсутствие толчков тока якоря. Однако плавиое движение подъемного сосуда обеспечивается только при значениях концевой нагрузки, близких к тому, при котором система была настроена, т. е. к оптимальному. При изменении нагрузки в щироких пределах в указанном устройстве возникают толчки тока якоря и колебания подъемного сосуда. Этот недостаток связан с параллельным включением двух указанных регуляторов тока. Толчки тока якоря и колебания подъемного сосуда возникают при переходе от двигательного режима к генераторному, т. е. тормозному, в условиях, когда концевая нагрузка мала (не превышает 0,4 оптимальной). На практике часто возникает необходимость в работе с такими значениями концевой нагрузки, ввиду чего для шахтной подъемной установки указанный выше недостаток является существенным. Целью изобретения является увеличение плавности отработки заданной тахограммы движения при работе установки в широком диапазоне значений концевой нагрузки за счет предотвращения толчков тока якоря и колебаний подъемного сосуда. Это достигается тем, что в предлагаемом устройстве для управления электроприводом постоянного тока установок типа шахтных подъемников датчик тока якоря через согласующее устройство соединен с одним из входов дополнительного сумматора, между вторым входом которого и выходом регулятора скорости включены соединенные параллельно первый разделительный диод и функциональный преобразователь, характеристика которого обратна характеристике намагничивания двигателя, выход дополнительного сумматора через первый блок согласования знака сигнала подключен к входу сравнивающего устройства регулятора тока возбуждения, датчик тока возбуждения через второй блок согласования знака сигнала и второй разделительный диод соединен с одним из входов сравнивающего устройства регулятора тока якоря, между выходом регулятора скорости и другим входом сравнивающего устройства регулятора тока якоря включен третий разделительный диод, а между выходом датчика скорости и входом сравнивающего устройства регулятора скорости включен третий блок согласования знака сигнала. На чертеже показана блок-схема предлагаемого устройства для управления электроприводом. Задатчик 1 скорости соединен с одним из входов сравнивающего устройства 2 регулятора 3 скорости. Выход регулятора 3 скорости через первый разделительный диод 4 соединен с одним из входов сравнивающего устройства 5 регулятора 6 тока якоря. Регулятор 6 тока якоря через нереверсивный тиристорный преобразователь 7 соединен с якорем 8 двигателя, который является выходным элементом устройства для управления и соединен с барабаном подъемной машины. Выход регулятора 3 скорости через параллельное соединение функционального преобразователя 9, характеристика которого обратна характеристике намагничивания двигателя, и второго разделительного диода 10 соединен с одним из входов сумматора И, выход которого через блок 12 согласования знака сигнала подключен к одному из входов сравнивающего устройства 13 регулятора 14 тока возбуждения. Выход регулятора 14 тока возбуждения через реверсивный тиристорный преобразователь 15 соединен с обмоткой 16 возбуждения. Отрицательная обратная связь по скорости осуществляется через датчик 17 скорости, включенный между якорем 8 двигателя и вторым входом сравниваюндего устро&тва 2 регулятора 3 скорости через блок 18 согласования знака сигнала. Отрицательная обратная связь по току якоря осуществляется через датчик 19 тока якоря, включенный выходом нереверсивного тиристориого преобразователя 7 и вторым входом сравнивающего устройства 5 регулятора 6 тока якоря. Отрицательная обратная связь по току возбуждения осущеетвляется через датчик 20 тока возбуждения, включенный между выходом реверсивного тиристорного преобразователя 15 и вторым входом сравнивающего устройства 13 регулятора 14 тока возбуждения. Выход датчика 19 тока якоря через согласующее устройство 21 соединен с вторым входом сумматора 11. Датчик 20 тока возбуждения через блок 22 согласования знака сигнала и третий разделительный диод 23 соединен с третьим входом сравнивающего устройства 5 регулятора 6 тока якоря. Два выхода входящего в комплект электропривода блока 24 выбора направления вращения двигателя подключены к входам переключающих элементов 25 и 26, замыкающие контакты которых входят в блоки 12, 18 и 22 соласования знака сигналов, причем каждый из этих блоков состоит из параллельно вклюенных контакта В переключающего элемена 25 и последовательно соединенного с инвертирующим усилителем Н контакта Н переключающего элемента 26.Устройство работает следующим образом. В режиме «Подъем груза замыкаются конакты В. Задатчик 1 скорости формирует сигал, отображающий требуемую тахограмму движения привода с заданным темпом изменения скорости Пз в режимах разгона и торможения. Указанный сигнал поступает на вход сравнивающего устройства 2 регулятора 3 скорости. Полярность напряжений на выходе элементов привода в двигательном режиме показана на чертеже знаками «Ц- и «- без скобок. Знаками «+ и «- в скобках показана полярность этих напря кепнй в тормозном режиме, Путь прохождения управляющих сигналов для двигательного режима показан на чертеже сплопшой линией. Пунктирная линия показывает путь прохождения управляюнлих сигналов в тормозном режиме. Во время разгона при подъеме груза привод работает в двигательном режиме. При этом регулятору 3 скорости подчинены включенные параллельно друг другу контуры регулирования токов якоря и возбуждения; сигнал ошибки отрипательной полярности с выхода регулятора 3 скорости через диод 4 проходит на вход сравнивающего устройства 5 регулятора 6 тока якоря. При этом действительное значение тока якоря /Яд устанавливается в зависимости от заданного значения /..д и напряжения обратной связи. Одновременно с этим сигнал задания скорости поступает на вход сравниваюпхего устройства 13 через согласующее устройство 21, сумматор 11 и контакт В блока 12 согласова П- е знака сигнала. При этом в качестве согласующего устройства 21 используется инвертируюишй усилитель. Таким образом, связь между контурами регулирования токов якоря и возбуждения в двигательном режиме является положительной. Коэффипиент усиления подбирается при этом таким, чтобы при нагрузках, составляющих 0,4-0,5 номинальной, ток возбуждения был равен номинальному. При мекылнх нагрузках ток возбуждения будет меньше номинального, благодаря чему облегчаются условия перехода привода в режим торможения. По окончании разгона привод переходит в режим движения с установивщимися скоростью, якорным током и током возбуждения. В момент начала торможения сигнал задатчика 1 скорости начинает мсньн1аться. В зависимости от величины поднимаемого груза на входе регулятора 3 скорости появляется сигнал, знак которого онределяет необходимость в двигательном или тормозном режиме. При концевых нагрузках .Мс(0,4-0,5)Мснд,,, где Мс„о„ -номинальное значение концевой нагрузки, свободный выбег установки обеспечивает замедления привода, превыщающие заданное. При этом необходим двигательный момент привода меньщей величины, чем момент при равномерном движении. В этом случае полярность входного сигнала регулятора скорости 3 остается неизменной, а амплитуда уменьшается. Это вызывает уменьшенные значения токов якоря /яд и возбуждения /Пд . Таким образом, при указанных выше значениях нагрузки в течение всего периода подъема привод работает в двигательном режиме, а пути прохождения управляющих сигналов остаются такими же, как на этапе разгона (показаны на чертеже сплошными линиями). При концевых нагрузках М.с.(0,4- тормозной эффект груза обеспечивает замедление привода, меньше заданного. В этом случае на входе регулятора скорости ноявляется сигнал, соответствующий превышению действительной скорости Пд над заданной Пз, что приводит к изменению полярности выходного сигнала регулятора 3 скорости. Сигнал такой полярности не может пройти через диоды 4 и 10. Поэтому путь прохождения управляющих сигналов изменяется и принимает вид, соответствующий режиму торможения. Указанная выше форма характеристики функционального преобразователя 9 необходима для обеспечения плавности тормозных режимов привода при нагрузках типа «протягивающего груза. В соответствии с выходным сигналом функпионального преобразователя 9 регулятором 14 тока возбуждения отрабатывается новое заданное значение тока возбуждения tp с полярностью противоположного знака по сравнению с полярностью в двигательном режиме. При появлении тока 1вд отрицательной полярности на вход регулятора 6 тока якоря через разделительный диод 23 и контакт В блока 22 согласования знака сигнала поступает сигнал /яз от датчика 20 тока возбуждения. Под действием ЭДС якоря в цепи последнего появ.ляется ток /я , который в виде сигнала отрицательной обратной связи поступает через датчик 19 тока якоря, согласующее устройство 21, сумматор И и контакт В блока 12 согласования знака сигнала на вход сравнивающего устройства 13 регулятора 14 тока возбуждения, устанавливая на входе последнего результирующий сигнал Ар(.г5 Л1кз - -Д/яд-4ip,, который определяет величину тормозного момента, развиваемого двигателем в генераторном режиме. По мере у1мсньшения действительной скорости в соответствии с заданной тахограммой уменьшается и значение ЭДС якоря двигателя, являющегося в данном режиме источником энергии и работающего на противо-ЭДС якорного преобразователя в инверсном режиме. При этом контуром регулирования якорного тока поддерживается постоянное значение /Яд в соответствии с заданным /Яз и соответственно постоянное значение тормозного момента двигателя вплоть до остановки последнего. В режиме «Спуск груза контакты В блоков 12, 18, 22 согласования знаков сигналов разомкнуты, а контакты Н замкнуты, благодаря чему между выходом датчика 17 скорости и входом сравнивающего устройства 2, между сумматором 11 и сравнивающим устройством 13, выходом датчика 20 тока возбуждения и разделительным диодом 23 включаются инвертирующие усилители И, этим обеспечивается работа схемы, аналогичная ее работе в режиме «Подъем груза.
Таким образом, соединение датчика тока якоря с одним из входов сравнивающего устройства рег)лятора тока возбуждения обеспечивает непосредственную связь между текущими значениями тока якоря и тока возбуждения, что способствует уменьшению колебаний подъемного сосуда и тока якоря. Благодаря Зниполярности преобразователя, питающего цепь якоря, указанная связь в двигательном режиме является положительной, а в тормозном режиме - отрицательной. Включение разделительных диодов придает устройству свойства системы автоматического регулирования с изменяющейся структурой.
В двигательном режиме первый и второй разделительные диоды открыты, а третий диод закрыт. При этом регзлятору скорости подчинены включенные параллельно друг другу контзфы регулирования тока якоря и тока возбуждения. В тормозном режиме привода первый и второй диоды закрыты, а третий диод открыт. При этом рогзлятору скорости подчинен контур регулирования тока возбуждения, которому в свою очередь подчинен контур регулирования тока якоря. В этом режиме входной сигнал, поступающий на регулятор тока возбуждения, формируется функциональным преобразователем с характеристикой вход-выход, обратной характеристике намагничивания, скорость нарастания тока якоря определяется скоростью нарастания тока возбуждения. Соответственно результирующий электромагнитный момент двигателя изменяется с допустимой скоростью, что предотвращает чрезмерные динамические усилия в каратах.
Благодаря этому обеспечиваются устойчивые тормозные режимы привода при подъеме и спуске грузов, вес которых лежит в пределах от нуля до но.минальной величины.
Формула изобретения
Устройство для управления электроприводом постоянного тока установок типа щахтных подъемников, содержащее нереверсивный тиристорный преобразователь в цепи возбуждения, автоматические регуляторы скорости, тока якоря и тока возбуждения двигателя, отличающееся тем, что, с целью увеличения плавности отработки заданной тахограммы движения при работе установки в широком диапазоне значений концевой нагрузки путем предотвращения толчков тока якоря и колебаний подъемного сосуда, датчик тока якоря через согласующее устройство соединен с одним из входов дополнительного сумматора, между вторым входом которого и выходом рег5лятора скорости включены соединенные параллельно первый разделительный диод и функциональный преобразователь, характеристика которого обратна характеристике намагничивания двигателя, выход дополнительного сумматора через первый блок согласования знака сигнала подключен к входу сравнивающего Зстройства регулятора тока возбуждения, датчик тока возбуждения через второй блок согласования знака сигнала и второй разделительный диод соединен с одним из входов сравнивающего устройства регулятора тока якоря, между выходом регулятора скорости и другим входом сравнивающего устройства регулятора тока якоря включен третий разделительный диод, а между выходом датчика скорости и входом сравнивающего устройства регулятора скорости включен третий блок согласования знака сигнала,
,2


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Электропривод подъемной машины | 1980 |
|
SU893780A1 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Реверсивный электропривод постоянного тока | 1973 |
|
SU602139A3 |
| АВТОМАТИЗИРОВАННЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1969 |
|
SU257583A1 |
| Реверсивный вентильный электродвигатель | 1977 |
|
SU744861A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1975 |
|
SU752711A1 |