Известен автоматизированный асинхронный электропривод шахтной подъемной установки, управляемый по заданной тахограмме движепия подъемных сосудов изменением величины момента на валу двигателя путем шунтирования его роторных сопротивлений, содержаший аналого-дискретную снстему управления контакторам;и ускорения, блок постоянного тока для динамического торможения, узел сравнения на датчике действительной скорости и задатчике заданной скорости, а также механический тормоз с системой регулирования.
В предложенном устройстве в качестве формирователя выходных сигналов указанного задатчика использован магнитный усилитель, одна из обмоток управления которого подключена через сопротивление к одноименным выводам входа и выхода задатчика, а для формирования сипналов заданного ускорения применен нелинейный элемент, включенный между одноименными выводал и входа задатчика и вы.хода датчика. Вход системы регулирования механическим тормозом соединен через дифференцируюший элемент с выходом аналого-дискретиой системы, а выход соединен со входом аналого-дискретной системы.
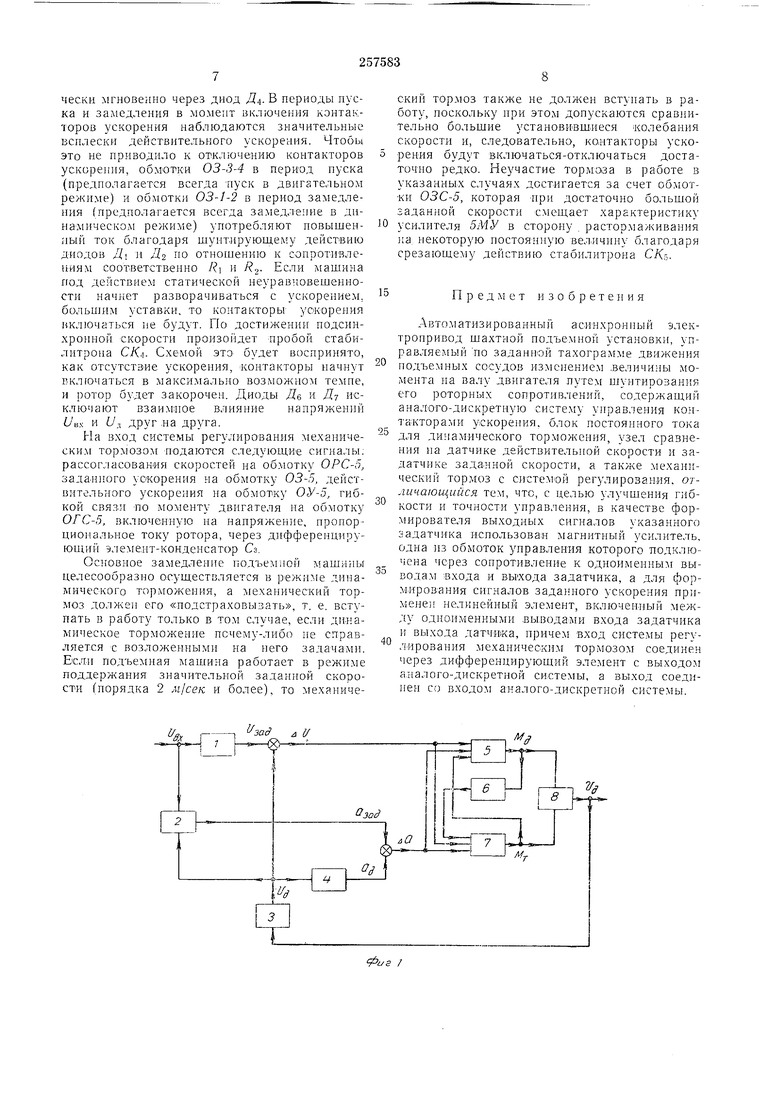
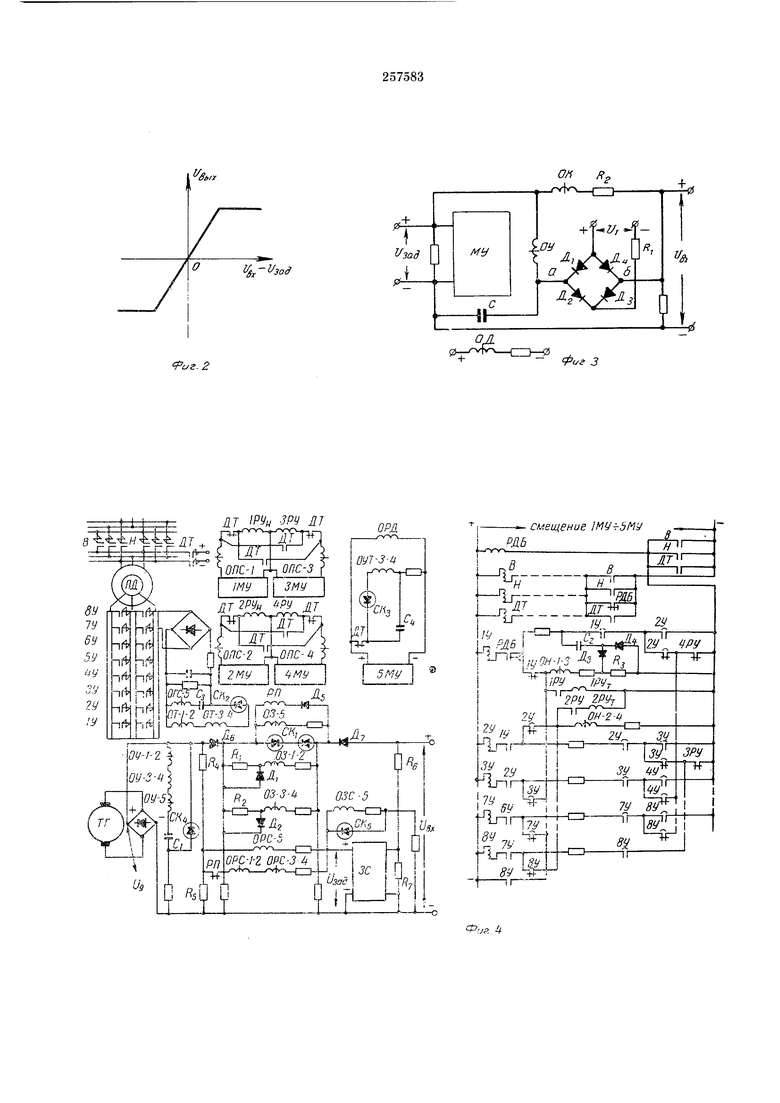
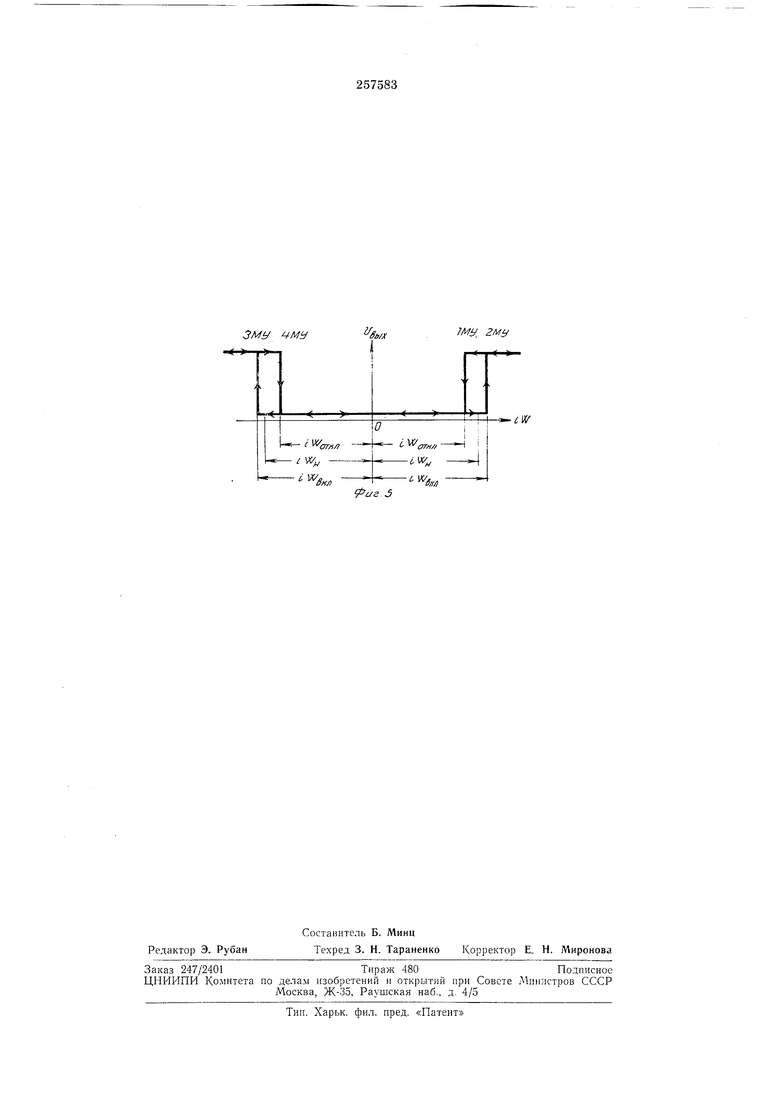
На фпг. 1 приведена блок-схема предложенного устройства; на фпг. 2 - характеристика нелинейного элемента; на фиг. 3 - иринпиппальная схема задатчика заданной скорости; на фиг. 4 - принципиальная электрическая схема устройства; на фиг. 5 - характеристики магнитных усилителей аналого-дискретной системы.
На фиг. 1 приняты следующие обозначе;1ия: 1 - задатчик заданной скорости; 2 - иелинейньп элемент для формирования сигналов заданного ускорения; 3 - датчик действительной скорости; 4 - дифференцируюшпй элемент для формирования сигналов действителыюго ускорения; 5 - аналого-дискретная система; 6 - дифференцируюш,ий элемент; 7 - система регулирования механическим тормозом; 8 - подъемная машина.
Устройство работает следующим образом.
На вход задатчика / подается напряжение бвх, которое изменяется ступенчато в соответсгвн с введенной программой, например, в результате замыкания-размыкания этажных выключателей путевого программного комаидоаппарата, приводимого от вала подъемной машииы, и представляет собой предиисанное установившееся значение скорости. Задатчиком это напряжение преобразуется в линейно изменяющееся в фупкпии времени напряжение t/зад заданной скорости, которое сравнивается с напряжением U действительной скорости, пропорциональным скорости подъемной машины. Разность U - - д подается на вход аналого-ди-скретной системы 5 и на вход системы 7 регулирования тормозом. На входы этих систем подается также разность А а сигналов заданного а зад и действительного Сд ускорений. Для формирования сигналов заданного ускорения применен нелинейный элемент 2, включенный между одноименными выводами входа задатчика / и выхода датчика 3, т. е. на разность напряжений вх и бд. Сигиал заданного ускорения пропорционален падепию напряжения f/uux на элементе 2, который представляет собой типичную нел1инейность с линейной зоной и участками насыщения (фиг. 2), поэтому ири достаточно большой разности f/sx - Ьд сигнал заданного ускорения сохраняется постоянным. Сигнал действительного ускорения а., формируется дифференцирующим элементом 4, как производная панряжеиия л действительной скорости. Таким образом, в устройстве осуществляется двухкоитурное регулирование по скорости ,и ускорению с воздействием на двигатель и тормоз подъемной .машины, причем сиппал заданного ускорения формируете в каждый момент времени как функция между предписанным установившимся и действительным значениями скорости. Благодаря этому улучшается точность управления.
Регулирование скорости подъемной машины осуществляется из менением величи1НЫ момента /Ид на валу двигателя аналого-дискретной системой 5 и величины тормозного момента М г системой 7 регулирования тормозом. При движении .подъемной машиньг с неболь1ПОЙ заданной скоростью эти мО|Менты должны между собой рационально координироваться, так как в противном случае может возннкнуть ситуация, при которой они в основном будут гасить друг друга, что нриведет ь: перерасходу электроэнергии и чрезмернолгу износу тормозной системы. Подобное координирование производится путем нодачи сигнала с выхода системы регулирования тормозом на вход аналого-дискретной системы. Таким об разом, регулир1ованне момента М д на валу дв1игателя производится в функции тормозного момента , а именно: при не:котором пороговом значении М т -- /Vl-r подается импульс на отключение контактора ускорения, т. е, уменьшение /Ид при Л ,. 0 поступает разрешение на включение -контактора ускорения, в диапазоне M.J момент /Ид не регулируется. При включении-отключении контакторов ускорения момент ;УГ д на валу двигателя изменяется -скачком. В то же время системе регзлирования тормозов присуща некоторая ииерциоиность и поэтому наблюдаются нежелательные всплески и провалы скорости при его скачкообразном изменении. Для их устранения 1на вход системы регулирования тормозом иодается сигнал иоложительной гибкой связи по моменту двигателя путем соедииения входа системы регулирования тормозом через дифференцирующий элемент с выходом аналого-дискретной системы. Это позволяет
существенно форсировать переходный процесс в Системе регулирования тормозом. Таким образом, рациональная взаимная координация моментами двигателя и тормоза позво ляет улучшить гибкость н точность регулирования Скорости. В качестве формирователе выходных сигналов задатчика заданной скорости (фиг. 3) иснользован магнитный усилитель МУ, охваченный глубокой гибкой отрицательной обратной связью через емкость С.
15 К точкам а н б диодного могта 1Прикладывается разность напряжений UK и зад. т- е.
f/ao f/BX --t/эал. ПрИ La6 - О В ЗЯБИСИМОсти ОТ его полярности, запираются диоды Д, и Дз либо Да и Д4, и папряжения f/вх, зад
0 и f/i оказываются включенными последовательно в один общий контур с обмоткой ОУ управления магнитного усилителя, причем i/Bx и 6зад действуют встречио друг другу, а Ll согласно с тем из них, которое больше.
5 В результате происходит процесс изменения напряжения 6зад ДО тех пор, пока U ав не обратится в пуль. Прп этом, если не принять каких-то специальных мер, функцня Сзад (Огде / - время, будет близкой к экспоненте, .з
0 то время как она должна быть прямой линией. Для полученпя линейного закона изменения напряжения 6зад во времени одна из сб.моток управления мапгитпого усилителя --компенсирующая обмотка О/С - нодключе1:а
5 через сопротивление к одноименным выводам напряжений Овх и (/зад т. е. на их разность. Математически строго можно доказать, что при правильном выборе соотношения межлу
сопротивлениями и функция U аад ((}
будет линейной. Задатчик должен обеспечивать возможность индивидуального выбора величину.
--,f- для периодов пуска и замед
дения.
Для этого используется доиолнительная обмотка ОД, амнер-:витки которой в зависимости от полярности цриложеиного к ней напряжения, например, в период пуска форсируют р.арастапие напряжения U зал , а в нериод замедления сдерживают его убывание, или наоборот. Напряжение 6за можно реверсировать, если использовать .реверсивный маг1п-1тный усилитель. Для формирования в случае необходимости сигнала сложиой формы в качестве сопротивления можно использовать
нелинейные элементы.
Описанной блок-схеме соответствует, например, принципиальная электрическая схема (фиг. 4) На чертеже обозначены статорные контакторы В, Н, ДГ, подъемпый двигатель //Д, реле дуговой блокиров ки РДБ; коптакторы ускорения /У, 2У, ЗУ, 7У, 8У (контакторы ускорения 4У, 5У, 6У, имеющие апалогичные цепи управления, с целью экономии места опущены), магиитные усилители 1МУ, 2МУ, /ИУ,
венно с обмогками управления полож-ительной связи ОПС-1, ОПС-2, ОПС-3, ОПС-4, напряжения ОН-1-3; ОН-2-4 (с целью экономии места последовательно включенные обмотки двух усилителей обозначены, «ак одна с двойным И1ндексом - Например, обмотки ОН-1 и ОН-3 обозначены, как ОН-1-3), токовой отсечки ОТ-1-2, ОТ-3-4, заданного ускорения ОЗ-1-2, ОЗ-3-4, действительного ускорения ОУ-1-2, ОУ-3-4, рассогласования скоростей ОРС-1-2, ОРС-3-4, связи по тормозному моменту ОУТ-3-4; реле управления 1РУ, 2РУ аналого-диокретной системы соответственно с катушками напряжения 1РУ 2РУя и токовыми катушками 1РУ-г, 2РУ, реле управления ЗРУ, 4РУ, аналого-дискретной системы, реле РП, магнитный усилитель системы регулирования тормозом 5МУ с обмотками управления заданного ускорения ОЗ-5, действительного ускорения ОУ-5, рассогласования скоростей ОРС-5, гибкой связи по моменту двигателя ОГС-5, заданной скорости ОЗС-5, обмотка управления электропневматического регулятора давления ОРД, задатчик заданной скорости ЗС, тахогенератора ТГ, кремниевые стабилитроны C/d-CKs, полупроводниковые диоды , конденсаторы Ci-С, установочные сопротивления Ri-RT.
Схема работает следуюп;им образом. Контакторы ускорения 1У-8У могут автоматически как включаться, так и отключаться. Включение производится в направлении от 1У к 8У, при этом нечетные контакторы включает реле }РУ, четные - 2РУ. Отключение производится в направлении от 8У к 1У, при этом четные конта|Кторы отключает реле ЗРУ, нечетные - 4РУ. В двигательном режиме реле 1РУ управляется усилителем 1МУ, реле ЗРУ- усилителем ЗМУ. В динамическом режиме эти связи перекреш,иваются - реле 1РУ управляется усилителем ЗМУ, а реле ЗРУ-усилителем МУ. Аналогично для 2РУ и 4РУ и усилителей 2МУ и 4МУ. Благодаря перекреш.ивающимся связям подача импульсов на включение реле от усилителей 1МУ и 2МУ приводит к увеличению ускорения и скорости как II двигательном, так и динамическом режимах, а от усилителей 5Л1У и 4МУ к их уменьшению. Усилители //ИУ-4А1У имеют релейные характеристики за счет положительных связей через обмотки one, приведенные на фиг. 5, где - выходное напряжение усилителей, tWвк.ч -ампервитки включения; iWо- кл-ампервитки отключения, iW -ампервитки обмоток ОН. Так как ( ,то ампервитков iWк недостаточно для включения усилителей, и они лишь переводят усилители в режим готовности к включению. Величина iW iWBK:i -ilFn определяет зону нечувствительности усилителей к входным сигналам, которая, в свою очередь, определяет амплитуду установившихся колебаний скорости при работе в режиме поддержания значительной заданной скорости. Напряжение подается одновременно либо на обмотки ОН-1-3, либо
на ОН-2-4, и в готовности к включению находятся одновременно либо усилители 1МУ и ЗМУ, либо 2А1У и 4М.У. Обмотки унравления, на которые ноступают входные сигналы, включены между собой таким образом, что еслн, например, суммарные ампервитки усилителя 1МУ в результате воздействия входных сигналов возрастают, то ампервитки усилителя ЗМУ уменьшаются. Благодаря этому постоянно имеется возможность либо включить, либо отключить очередной контактор ускорения.
Описанную схемную логику построения аналого-дискретной системы легко распространить также на статорные контакторы В, И
и ДТ по аналогии с контакторами ускорения. При этом будет достигнут автоматический переход из двигательного режима в динамический, и иаоборот, в функпии входных сигналов.
На вход аналого-дискретной системы подаются следуюш,ие сигналы. Сигнал рассогласования заданной и действнтельной скоростей подается на обмотки ОРС-1-2, ОРС-3-4. При этом для согласования параметров задатчика
ЗС с параметрами узла сравнения используются делители напряжения на сопротивлениях R.I и , Кб и . Сигнал заданного ускорения формируется на нелинейном элементе-стабилитронах С/Сз и нодается на обмотки 03-1-2,
ОЗ-3-4, сигнал действительного ускорения формируется дифференцнруюнд,нм элеА ентомконденсатором Ci и иодается на обмотки ОУ-1-2, ОУ-3-4. Сигнал токовой отсечки подается в функции тока ротора на обмотки
ОТ-1-2, ОТ-3-4. Так ка-к получнть информацию о величине непосредственно тормозного момента затруднительно, то связь по тормозli0 iy моменту осуществ.тяется путем включения обмоток ОУТ-3-4 на напряжение магнитного усилителя тормоза 5МУ, которое с достаточной степенью точностн можно счнтать нронорциональным тормозному моменту. Конденсатор Сз, сглаживает пульсации напряжения, а стабилитрон С/Сз определяет величину
порогового значения тормозного момента, при котором происходит отключение контакторО 3 ускорения. Если последовательно с обмотками ОУТ-3-4 включить также обмотки ус 1лнтелей 1МУ и 2МУ, то связь по тормозному моменту
будет также накладывать запрет на увеличение момента двигателя. В режиме динамического торможения эта связь нежелательна, и поэтому она отключается. Если пуск машины осуществляется по ускорению, то цеиь обмоток ОРС-1-2, ОРС-3-4 размыкается контактом реле РП, катушка которого включена через диод Дз на нанрялхенне заданного ускорения. Включение контактора 1У производится с выдержкой времени, нeoбxoди toй для натяжеПИЯ системы. Эта выдержка достигается за счет заряда конденсатора Со через диод Дз и сопротивление . что обусловливает появление установившегося тока в обмотках ОН-1-3 с некоторыл запаздыванием. После включечески мгновенно через диод Д. В периоды пуска и замедления в момент включения контакторов ускорения наблюдаются значительные вснлески действительного ускорения. Чтобы это ие нриводнло к отключению контакторов ускорения, обмотки 03-3-4 в период пуска (преднолагается всегда пуск в двигательном режиме) и обмотки 03-1-2 в период замедления (предполагается всегда замедление в динамическом режиме) употребляют повышенный ток благодаря шунт-ирующему действию диодов Д1 и по отношению к сопротивлениям соответственно R и /,. Если машина ггод действием статической неурав ювешенности начнет разворачиваться с ускорением. больн1им уставки, то контакторы ускорения включаться ие будут. По достижении нодсинхронной скорости произойдет пробой стабилитрона СК.4. Схемой это будет воспринято, как отсутствие ускореиия, контакторы начнут включаться в максимально возможном темпе, и ротор будет закорочен. Диоды Де и Ду исключают взаимаюе влияние напряжений Овх и бд друг ,на друга.
На вход системы регулирования механическим тормозом подаются следующие сигналы; рассогласования скоростей на обмотку ОРС-5, задаН ого ускорения на обмотку 03-5, действительного ускорения па обмотку ОУ-5, гибкой связл по .моменту двигателя на обмотку ОГС-5, включенную на иаиряжение, пропорциональное току ротора, через диффереицируюн1,ий элемент-конденсатор Сз.
Основное замедлеиие подъелпюй машины целесообразно осуществляется в режиме динамического торможения, а механический тормоз должен его «подстраховывать, т. е. вступать в работу только в том случае, если динамическое торможеиие почему-либо ие справляется с возложенными на него задачами. Бели подъемиая лгашина работает в режиме поддержания значительной заданной скорости (иорядка 2 м/свк и более), то механиче v ,1 . 4
скии тормоз также ие должен встунать в работу, поскОоТьку при этом допускаются cpaBiiHтельно большие устаиовИВЩИеся колебания скорости и, следовательио, ко.итакторы ускорения будут включаться-отключаться достаточно редко. Неучастие тормоза в работе в указанных случаях достигается за счет обмотки ОЗС-5, которая ири достаточио большой заданной скорости смещает характеристику усилителя 5Л1У в сторону . растормаживания на некоторую постоянную вел.ичину благодаря срезающему действию стабилитрона СК-,.
Предмет изобретения
Автоматизированный асинхронный электропривод шахтной подъемной установки, управляемый по заданной тахограмме движения подъемных сосудов измсненис.м .величи}1ы момента на валу двигателя путем шунтирования его роторных сопротивлений, содержащий аналого-дискретиую систему уиравлеиия контакторами ускорения, блок постоянного тока для динамического торможения, узел сравнения на датчике действительной скорости и задатчике заданной скорости, а также мехаиический тормоз с системной регулирования, отличающийся тем, что, с целью улучшения гибкости и точности управления, в качестве формирователя выходных сигналов указанного задатчика использован магнитный усилитель, одна из обмоток управления которого подключена через сопротивление к одноименным выводам входа и выхода задатчика, а для формирования сигналов заданного ускорения применен нелинейный элемент, включенный между одноименными выводами входа задатчика и выхода датчика, причем вход системы регулирования механическим тормозом соединён через дифференцирующий элемент с выходом а на лого-дискретной системы, а выход соединен со входом аналого-дискретиой системы.
6.,,
О
fus.2
O/1 R.
Л,
Фиг 3
Л 7 т зр щ
смещение 1М(
//Г
4f)
Ж.
2У
,,
Ж
2У ffPy
Л -- I
ЗМУ МУ
му гму
