1
Изобретение относится к вибрационной технике и может быть использовано в вибрационных, транспортных и технологических машинах.
Известны вибрационные приводы, содержащие рабочие и реактивные инерционные элементы, электромагнит к якорь, а также плоские стержневые пружины, работающие на продольно-поперечный изгиб. Эти устройства работают в режиме параметрического резонанса fJC lНедостатком известных электромагнитных приводов является то, что плоские пружины, работающие на продольно-поперечный изгиб, не позволяют увеличивать амплитуду колебаний рабочего органа.
Наиболее близким техническим решением к данному изобретению является элекромагнитный вибрационный привод, включающий рабочий орган и реактивные плиты, соединенные стержневыми упругими элементами, работающими на продольно-поперечный изгиб з1.
В этом устройстве удлинение плоских пружин и перераспределение напряжений в
них осуществляется путем защемления концов пружин в цилиндрических кулачках, что позволяет увеличить амплитуду, однако и в этом случае возможность дальнейшего увеличения амплитуды ограничена плоскими пружинами, работающими на продольно-поперечный изгиб.
Другим недостатком известного электромагнитного привода, является его сравнительно высокая сложность , связанная с необходимостью вводить в конструкцию специальные кронштейны и дополнительные пружины, связывающие реактивные плиты и растягивающие плоские пружины, которые испытывают продольно-поперечный изгиб.
Цель изобретения - увеличение амплитуды колебаний рабочего органа и упрощение конструкции.
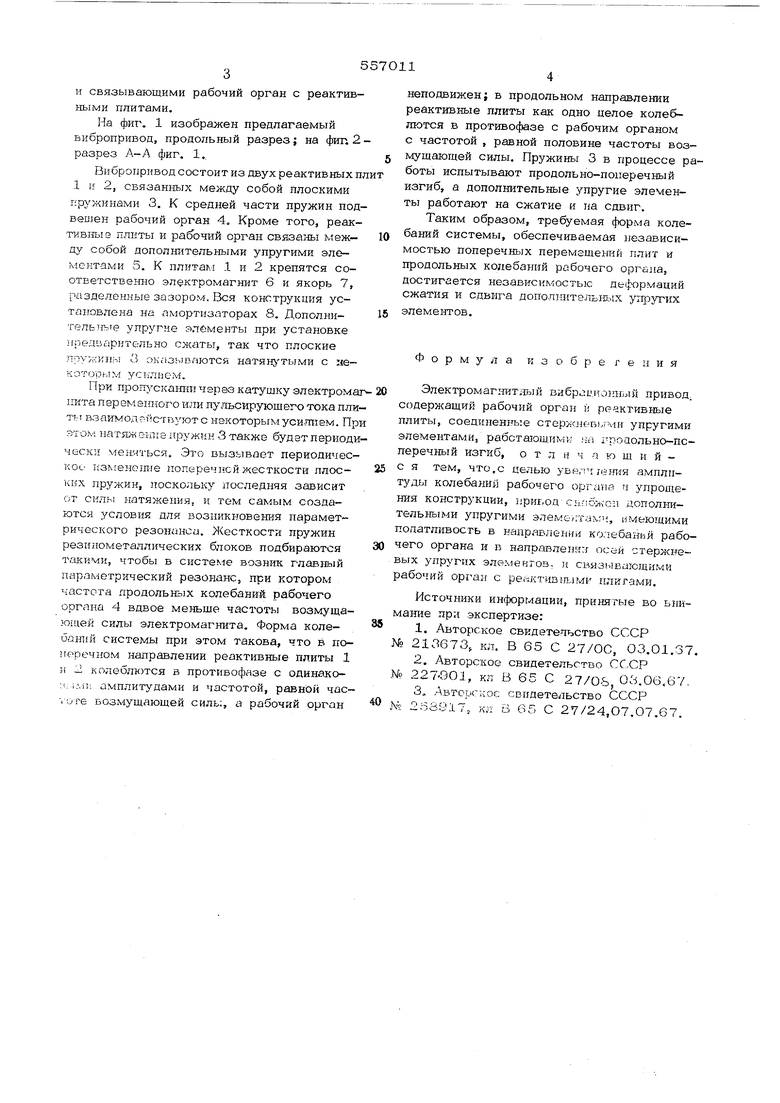
Эта цель достигается установкой в виброприводе дополнительных упругих элементов, имеющих податливость в направлении колебаний рабочего органа и в направлении осей стержневых упругих элементов. и связывающими рабочий орган с реактивными плитами. На фиг. 1 изображен предлагаемый вибропривод, продольный разрез; на фиг. 2 разрез А-А фиг. 1., Вибропривод состоит из двух реактивных п 1 и 2, сБязан1-1ых между собой плоскими гфужинами 3. К средней части пружин под вешен рабочий орган 4, Кроме того, реак тивны э плнты и рабочий орган овяза1-1ы между собой дополнительными упругими элементами 5. К плитам 1 и 2 крепятся соответственно электромагнит 6 и якорь 7, разделенные зазором. Вся конструкция установлена на амортизаторах 8. Дополнитепь 1ые упругие элементы при установке ьпедварителЬлЧо сжаты, так что плоские пру/кипы 3 ок.1зы1заются натян5тыми с Hesi о т о р h , ус li л и е- м. При прогр,скаш-П1 чэрез катушку электром пита перемениог о или пульсирующего тока пл тм взаимодггйстпуютс некоторым уси-mieM. П этом натяж sioie тружин 3 также будет период чески менч1ъся Это вызывает периодичес кое кзменеште поперечной жесткости плоских пружин, 1тоскольку последняя зависит от снлы натяжения, и тем самым создаются условия для возникновения параметрического резонанса. Жесткости пружин резинометаллических блоков подбираются такими, чтобы в системе возник главгый параметрический резонанс, при котором частота продольных колебаний рабочего органа 4 вдвое меньше частоты возмущающей силы электромагнита. Форма колебаш1й системы при этом такова, что в поперечном направлении реактивные плиты 1 и 2 колеблются в противофазе с одинако:ii.ii; амплитудами и частотой, равной час ,оге возмущающей силь;, а рабочий орган неподвижен; в продольном направлении реактивные плиты как одно целое колеблются в противо(})азе с рабочим органом с частотой , равной половине частоты возмущающей силы. Пружины 3 в процессе работы испытывают продольно-поперечный изгиб, а дополнительные упругие элементы работают на сжатие и на сдвиг. Таким образом, требуемая форма колебаний системы, обеспечиваемая независимостью поперечных перемещений плит и продольных колебаний рабочего oprajia, достигается независимостью деформаций сжатия и сдвига дополхштельюлх ухфугих элементов. Формула изобретения Электромагнитшз1й вибра1ч-то);н)1й привод, содержащий рабочий орган и реактивные плиты, соединенные стержнсБьгми упругими элементами, paбGтaюш, .чл 1роаольно-псперечный изгиб, о т л и ч а ю ш и и с я тем, что,с целью увелЕ/е шя амплитуды колебаний рабочего органа ч упрощения конструкции, приг.од снпбжсп дополнительными упругими элeмe rтa ;и,, имеющими податливость в направлении колебаний рабочего органа и в направленягг осей стержневых упругих элемевгоз. и связывающими рабочий орган с pe,::KTHBitt, плитами. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР 213673, кл. В 65 С 27/ОС, 03,01,37, 2,Авторское свидетельство СССР 227-901, кл В 65 С 27/08, 03,06.67. 3„ Лвторсмос свидетельство СССР 65 С 27/24,07,07.67.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный бункерный питатель | 1989 |
|
SU1640067A1 |
| ЭЛЕКТРОМАГНИТ/НЫЙ ВИБРАЦИОННЫЙ ПРИВОД | 1970 |
|
SU258917A1 |
| ВИБРАЦИОННАЯ ИЗМЕЛЬЧИТЕЛЬНАЯ МАШИНА | 2015 |
|
RU2604005C1 |
| Устройство для вибрационной обработки | 1983 |
|
SU1135621A2 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |
| Устройство для вибрационной обработки | 1985 |
|
SU1311857A1 |
| Вибрационная установка для обработки изделий | 1980 |
|
SU865633A1 |
| Устройство для вибрационной обработки | 1979 |
|
SU1090540A1 |
| Вибрационный конвейер | 1982 |
|
SU1033393A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2410167C1 |

