Изобретение относится к вибрационной технике и может быть использо-, вано для автоматизированной подачи деталей к различному технологическому оборудованию.
Целью изобретения является упрощен ние конструкции питателя
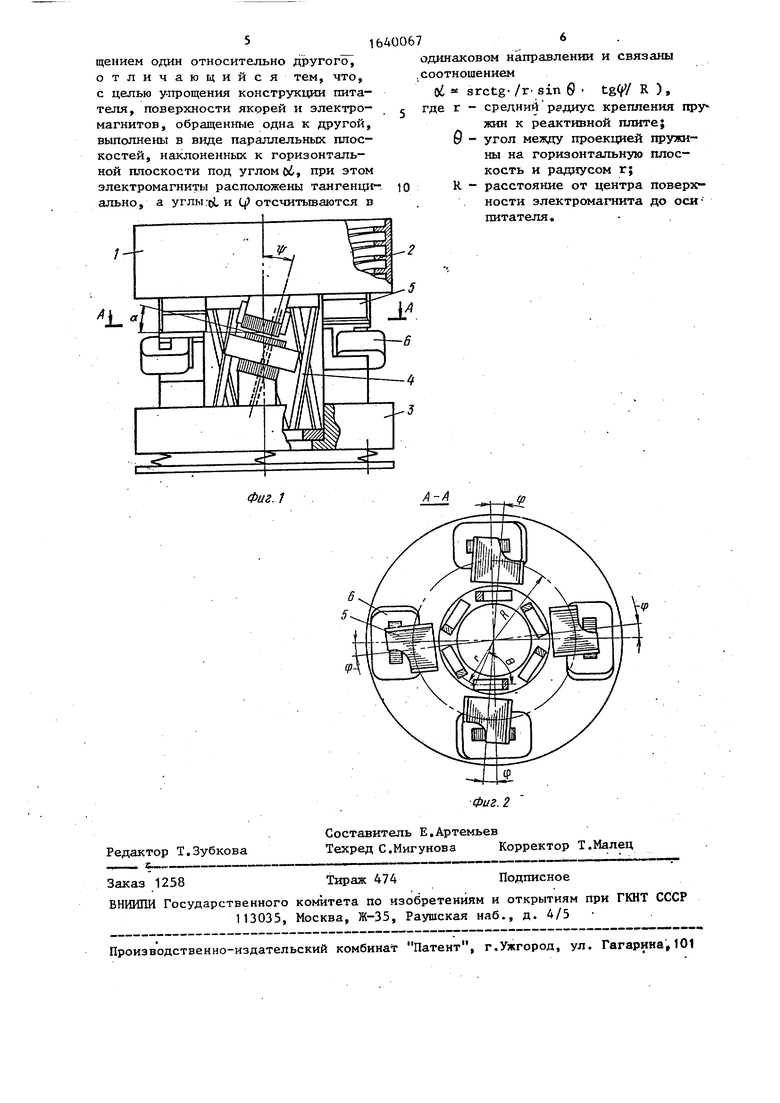
На фиг.1 изображен предлагаемый вибрационный питатель, общий вид; на фиг„2 - разрез А-А на фиг.1.
Вибрационный бункерный питатель содержит чашу 1 с винтовым лотком 2, соединенную с реактивной плитой 3 посредством стержневых пружин 4, наз клонных к вертикали под углом(р.
На чаше 1 закреплены якоря 5, а на реактивной плите 3 - соответствующие им электромагниты 6„ Якоря 5 и электромагниты 6 расположены попарно симметрично относительно оси чаши 1. Якоря 5 установлены с угловым смещением Cf относительно электромагнитов 6. Для каждой пары смещения якорей выполнено в одну сторону, причем для одной пары оно выполнено по часовой стрелке, для другой - против часовой стрелки.-Якоря 5 и электромагниты 6 установлены так, что их плоские рабочие поверхности наклонены к горизонтальной плоскости под углом .
Ф 4ь
С& Ч
pi arctg (r sin Q.,tg(/R),
где г - средний радиус крепления пру-
жин 4 к реактивной плите 3; 0 - угол между проекцией пружины 4 на горизонтальную плоскость и радиусом г;
R - расстояние от центра поверх- ности электромагнита до о си питателяо
Величина угла $, рассчитывается следующим образом. Для того, чтобы упругая система вибрационного бункера пи- тателя работала на продольно-поперечный изгиб в режиме параметрического резонанса, необходимо, чтобы рабочие поверхности электромагнитов и якорей вибровозбуждений были выпол- нены в виде винтового коноида с шагом
Н 2 nr.sinQ. tglf, (1)
ось которого соосна оси чаши, а на- правление винтовой линии коноида совпадало с направлением подъема винтовой линии лотка. Угол наклона 0Ј плоскости, касательной к винтовому коноиду в точке, удаленной на расстоянии R от его оси, относительно горизон- тальной плоскости можно определить как угол наклона винтовой линии, полученной в результате пересечения винтового Коноида цилиндром с радиусом основания R, ось которого совпа- дает с осью коноида. Это угол находят по формуле
Н
Подставив (1) в u arctg ( r.sin
Вибрационный питатель работает следующим образом
На обмотки электромагнитов 6 подают переменное напряжение с частотой, близкой к собственной частоте питателя. Причем напряжения, подаваемые на разные пары электромагнитов, сдвинуты по фазе на половину периода колебаний.. Эти напряжения вызывают токи, а они, в свою очередь, усилия, направленные нормально к поверхностям якорей 5 и электромагнитов 6. Будучи перенесенными в точки крепления стержневых пружин 4 при указан
0
,.
0
5
5
ной установке рабочих поверхностей: электромагнитов 6 и якорей 5 под углом к горизонтальной плоскости, эти усилия окажутся направленными вдоль пружин 4 и не смогут вызвать колебания питателя„ Однако так как якори 5 установлены с угловым смещением Ср относительно электромагнитов 6, кроме указанных упомянутых нормальных усилий, в вибровозбудителях появятся и касательные усилия, образующие для каждой пары крутящий мо менто Поскольку эти смещения для обеих пар вибровозбудителей противоположны, то в течение одной половины периода пара вибровозбудителей создает крутящий момент в одном направлении, а в течение другой половины - другая пара - в противоположном,, Этот крутящий момент вызывает запуск вибропитателя.
При достижении установившейся амплитуды колебаний питателя на все электромагниты питателя подается переменное напряжение в одной фазе с частотой, в два раза большей частоты запуска. Поскольку возмущающие касательные силы обеих пар вибровоз- будителей создают моменты в одном направлении и противоположно направленные, общий возмущающий крутящий момент будет равен нулю. Нормальные силы во всех вибровозбудителях будут действовать в одной фазе, и в каждом полупериоде колебаний питателя будут действовать возмущающие силы, направленные вдоль пружин 4. Таким образом, пружины 4 будут работать на продольно-поперечный изгиб, а чаша 1 и реактивная плита 3 питателя будут совершать противофазные колебания с частотой, в два раза меньшей частоты подаваемого напряжения, так как переход через недеформированное состояние пружин 4 происходит за счет сил инерции
Формула изобретения
Вибрационный бункерный питатель„ содержащий чашу с винтовым лотком, соединенную с реактивной плитой стержневыми пружинами, установленными под углом Ц к вертикали, и две пары электромагнитных вибровозбудителей, якоря и электромагниты которых установлены симметрично относительно оси питателя с угловым смеФаг. 1
Т.Зубкова
Л Фиг. 2
Составитель Е.Артемьев
Техред С. Миг у нов а
Кор
А-А
Корректор Т.Малец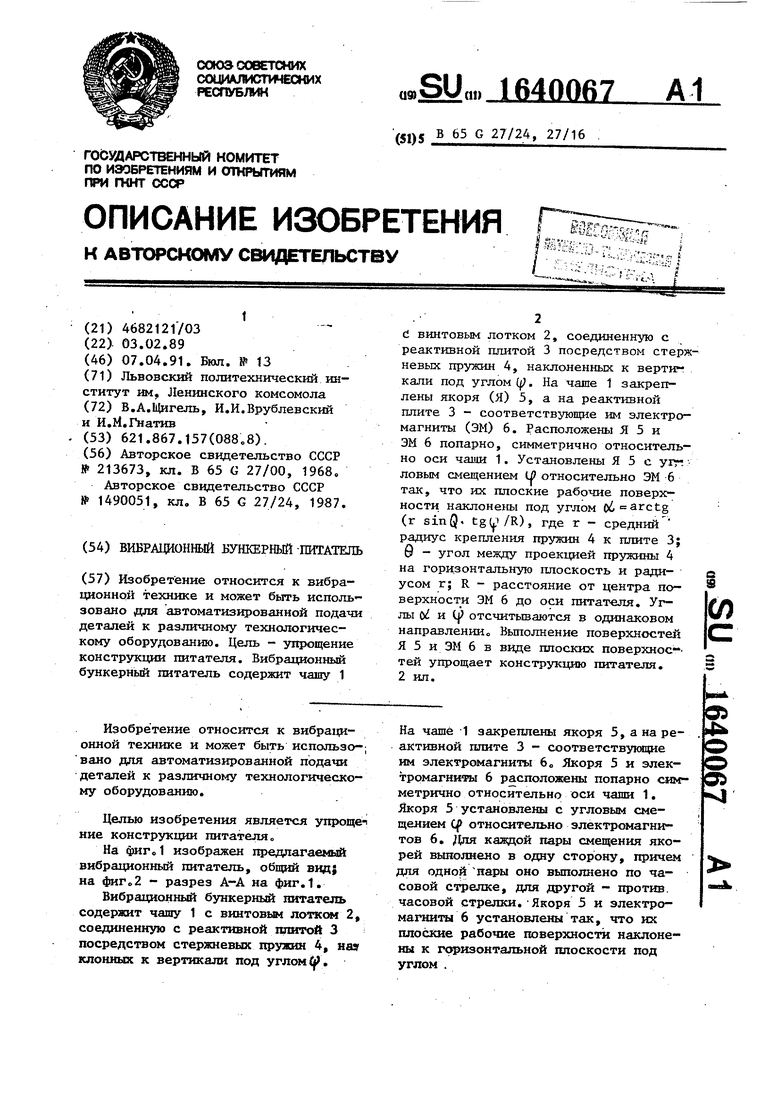

| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный бункерный питатель и способ его запуска | 1987 |
|
SU1490051A1 |
| Вибрационный бункерный питатель | 1986 |
|
SU1423471A1 |
| Вибрационный бункерный питатель | 1986 |
|
SU1419958A1 |
| Вибрационный бункерный питатель | 1982 |
|
SU1070090A1 |
| Вибрационное бункерное устройство | 1990 |
|
SU1751108A1 |
| Вибрационный питатель | 1989 |
|
SU1648859A1 |
| Вибрационное загрузочное устройство | 1987 |
|
SU1433878A1 |
| Способ возбуждения колебаний вибрационного питателя и устройство для его осуществления | 1991 |
|
SU1799825A1 |
| Вибрационный бункерный питатель | 1989 |
|
SU1615086A1 |
| Вибрационный бункерный питатель | 1974 |
|
SU897657A1 |
Изобретение относится к вибрационной технике и может быть использовано для автоматизированной подачи деталей к различному технологическому оборудованию. Цель - упрощение конструкции питателя. Вибрационный бункерный питатель содержит чашу 1 с винтовым лотком 2, соединенную с реактивной плитой 3 посредством стержневых пружин 4, наклоненных к вертикали под углом ф. На чаше 1 закреплены якоря (Я) 5, а на реактивной плите 3 - соответствующие им электромагниты (ЭМ) 6. Расположены Я 5 и ЭМ 6 попарно, симметрично относительно оси чаши 1. Установлены Я 5 с угг: ловым смещением U относительно ЭМ 6 так, что их плоские рабочие поверхности наклонены под углом o6 arctg (г sinQ« tg(.t/R), где г - средний радиус крепления пружин 4 к плите 3; Q - угол между проекцией пружины 4 на горизонтальную плоскость и радиусом г; R - расстояние от центра поверхности ЭМ 6 до оси питателя. Углы §L и tj) отсчитываются в одинаковом направлениио Выполнение поверхностей Я 5 и ЭМ 6 в виде плоских поверхнос-. тей упрощает конструкцию питателя. 2 ил. ю
| ВИБРАЦИОННЫЙ ЛОТОК | 0 |
|
SU213673A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Вибрационный бункерный питатель и способ его запуска | 1987 |
|
SU1490051A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
