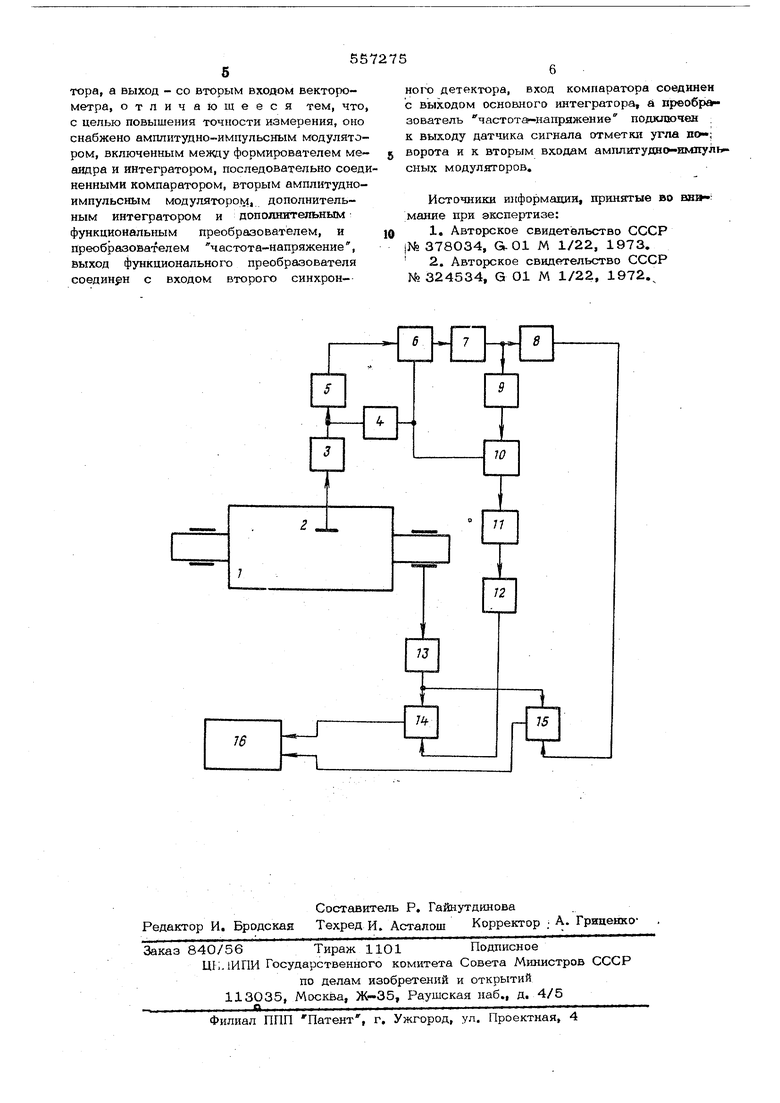
Изобретение относится к измерительной тех}шке и может быть использовано в приборах для динамической балансировки роторов. Известны устройства для определения параметров вектора дисбаланса, в которых опорный сишал. формируют с помощью резио тора, сопротивление которого механически изменяется синусоидальному закону ij. Трение ползунка при вращении ротора в этом устройстве, т.е. контактный счет информации снижает надежность устройства. Наиболее близким к изобретению по технической сущности является измерительное устройство для балансировочной машины 2j, Устройство содержит датчика и усилители сигаалов дисбаланса, синхронные детекторы, осветитель-фотоэлемент, формировагтель меандра, генератор симметричного пи лообразного напряжения (интегратор), функциональный преобразователь (безреактивный фильтр формирования синусоидального напряжения), фазосдвигаю.иий каскад, векторометр (в составе фазовра1ца..;ля, 1шдикаторов значения и угла дисбаланса). Одз1ако при пероменной скорости вращения меняется частота, т.е. на выходе 1штегратора меняется амплитуда симметричного пилообразного напряжения, обратно пропорционального частс те. При этом сигнал на выходе функционалъ ного преобразователя становится отличным от синусоидального, превращаясь в треугольный с увеличением частоты, - и в близкий к прямоугольному с уменьшением частоты. Если диапазон изменения частоты вращения невелик, например при слабопеременной скорости вращения, коэффициент нелилейных искажений опорного сигнала может з}1ачи- тельно изменяться, что приведет к искажеиной форме опорного сигнала, так как функциональный преобразователь на выходе дает синусоиду при одной фиксированной амплит де вхошюго треугольного напряжения. Искажение формы опорного сигнала приводит к снижению точности определения значения и угла дисбаланса. С,целью повьпиения точности измерения пгредлагаемое устройство снабжено амплитудно-импульсным модулятором, вкгаоченным между формирователем меандра и niiTcr-p ,TbpOM, поспедоватедьно соединенными компара твром, вторым амппигудно-импупьсным модулятором, дополните1тьным интегратор ом и допоп нигеяьным функциональным преобразоватепем, и преобразовагепем частота-напр гженйе , выход функционального преобразователя соединен с входом второго синхронного де .тектора, вход компаратора соещшен с вь ходом основного 1штвгратора,: а преобразо« Нагель частотф напряжение подключен к , выходу датчика сигнала ртметки угла по Ворота и к вторым входам амплитудно импульсных модуляторов. На чертеже изображена блок схема пре лагаемого измерительного устройства для балансировочного станка. Она содержит вра щающийся ротор 1 с отметкой угла 2, да-р чик 3 сигнала отметки преобразователь,4 частота-налряжение формирователь 5. меандра,амгшитудно импульсный модулятор 6 интегратор 7, фушд.ональный преобразова- , тель 8 и компаратор 9, второй aмплитyдIio импульсный модулятор 10, дополнительный интегратор 11, дополнительный функциональ ный преобразователь 12, датчик 13 сигнал дисбаланса, сгшхронные детекторы 14, 15 и векторметр 16, При вращении неуравновешенного ротора 1 образуются колебания опор, которые ре гистрирует датчик 13 сигнала дисбаланса, Датчик 3 сигнала отметки, расположенной на роторе (отметка молот быть онтнческой магнитно, радиоактивной и т.д.) вырабат7з1вает один импульс напряжения за одни обо- рот ротора. Из этого импульса в формиро вателе 5 меандра формируется симметрич ное прямоугольное напряжение (меандр). Причем из этого импульса также образует ся постоянное напряжение, пропорциональ ное частоте вращения ротора, в преобразова теле 4 частота-напряжение, вкщоче шом на выход датчик 3 сигнала отметки. Образованные напряжения (постоянное, пропорциональное частоте, и меандр) подаются на входы амш1ит дно-импульсного модулятора 6.Меандр используется в качестве модул руемого напряжения, а посто$шное напряжение, пропорциональное частоте, - в качестве модулирующего. Таким образом, на выхо де модулятора 6 получается напряжение в виде меандра, амплитуда которого изменяется пропорционально изменению частоты вращения. Этот сигнал подается на интегратор 7,где после интегрирования получается тре угольное напряжение, причем амплитуда этого треугольного напряжения не зависит от изменения частоты вращения. Например, с ростом частоты пропорционально увел1гчивается амплитуда меандра на выходе модулятора 6, а в процессе интегрирования после шггегратора 7 амплитуда треугольного на пряжения уменьшается пропорционально чао . тоте, поэтому в результате такой компенсации амплитуда треугольного напряжения сох раняется постоягшой, не зависящей от чаототы вращения вала. Оно поступает на вхоД функщтонального преобразователя 8 (напр1 « мер, содержащего полевой транзистор и использующего свойства его стоковой характеристики, имеющей форму четверти периода синус оиды), на выходе которого образует ся синусоидальный сигнал, поступающий на первый вход синхронного детектора 15. Треугольное напряжение с выхода интегратора 7 поступает на вход компаратора 9, На его выходе образуется прямоугольное напряжение (меандр), получаемое при переходе через нуль треугольного напряжения, т.е, вновь полученное прямоугольное напряжение сдвинуто на четверть периода относительно прямоугольного напряжения с выхода форм рователя 5, Зто сдвинутое прямоугольное напрянсение поступает на первый вход литудно-импульсного модулятора 1О, на другой его вход поступает постоянное напряжение, пропорциональное частоте вращения ротора, с выхода преобразователя 4 частота- напрялсение Далее сигнал претерпевает преобразования, аналогичные описанным,. На выход модулятора Ю подключен интегратор 11, формирующий треугольное напря жение, амплитуда которого не зависит от частоты. Затем оно поступает на функциональный преобразователь 12, образующий коси нусоидальный сигнал, который подается на синхронный детектор 14, На вторые входы синхронных детекторов 14 и 15 подается сигнал с датчика 13 дисбаланса. На выходах cHHXpoHJibix детекторов соответственно образуется постоянное напряжение, пропорциональное проекциям вектора дисбаланса, Эти напряжения поступают в векторметр 1 в где происходит регистрация значения и угла дисбаланса. Формула изобретения Измерительное устройство для балансироочного станка, имеющего установленный в порах ротор с отметкой угла поворота, соержащее последовательно соединенные датик сигнала отметки угла поворота и форирователь моандры, последовательно соеиненные интегратор, функциональный пребразователь, синхронный детектор и век- орометр, и последовательно соединенные порный датчик сигнала дисбаланса и втоой синхронный детектор, вход которого содинен с входом nepBoixi синхронного детектора, а выход - со вторым входом векторометра, отличающееся тем, что, с цепью повышения точности измерения, оно снабжено амплитудно-импульсным модулятором, включенным между формирователем меандра и интегратором, последовательно соединенными компаратором, вторым амплитудноимпульсным модулятороь/, дополнительным интегратором и дополнительным функциональным преобразователем, и преобразователем частота-напряжение, выход функционального преобразователя соединен с входом второго синхронHOixi детектора, вход компаратора соединен с выходом основного интегратора, а преобразователь частота-напряжение подключея ; к выходу датчика сигнала отметки угла по-; ворота и к вторым входам амплитудно-импуль сных модуляторов.
Источники ш формации, принятые во
мание при экспертизе: 1, Авторское свидетельство СССР |№ 378034, G.01 М 1/22, 1973. 2. Авторское свидетельство СССР № 324534, G О1 М 1/22, 1972,
| название | год | авторы | номер документа |
|---|---|---|---|
| Генератор опорных сигналов | 1978 |
|
SU693536A1 |
| Генератор опорных сигналов | 1976 |
|
SU585594A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| ШИРОКОДИАПАЗОННЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2002 |
|
RU2227272C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ВРАЩЕНИЯ ПЛОСКОСТИ ПОЛЯРИЗАЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И ФОТОЭЛЕКТРИЧЕСКИЙ ПОЛЯРИМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2088896C1 |
| Измерительное двухканальное устройство к балансировочному станку | 1981 |
|
SU974173A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
