Изобретение относится к балансировочной технике и может быть использовано в балансировочных станках, например, для балансировки автомобильных колес.
Цель изобретения - повышение точности определения угла коррекции дисбаланса за счет исключения субъективных ошибок оператора.
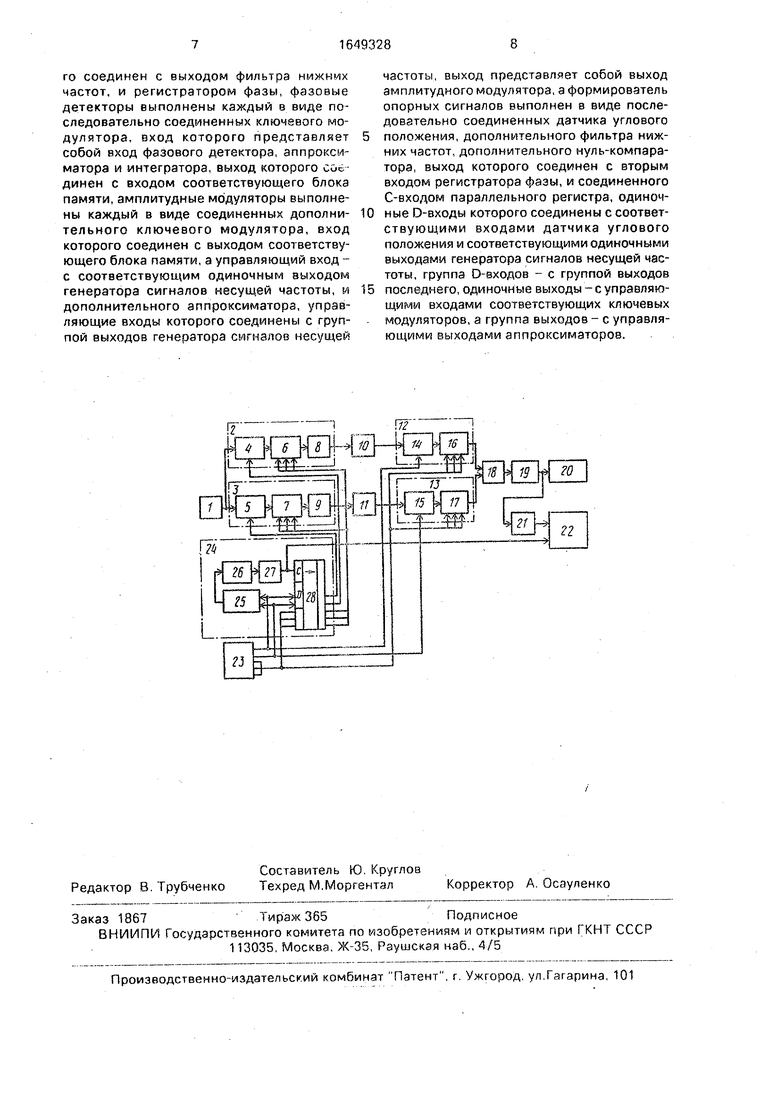
На чертеже представлена структурная схема измерительного устройства к балансировочному станку.
Измерительное устройство к балансировочному станку содержит вибродатчик 1, первый и второй фазовые детекторы 2 и 3, каждый из которых выполнен в виде последовательно соединенных ключевого модулятора 4(5), вход которого соединен с выходом вибродатчика 1, аппроксиматора 6(7) и интегратора 8(9), соединенные соответственно с выходами последних первый и
второй блоки 10 и 11 памяти, первый и второй амплитудные модуляторы 12 и 13, каждый из которых выполнен в виде последовательно соединенных дополнительного ключевого модулятора 14(15), вход которого соединен с выходом соответствующего блока 10(11) памяти, и дополнительного аппроксиматора 16(17), последовательно соединенные сумматор 18, входы которого соединены с выходами дополнительных ап- проксиматоров 16 и 17, фильтр 19 нижних частот и измеритель 20 значения дисбаланса, последовательно соединенные нуль- компаратор 21, вход которого соединен с выходом фильтра 19 нижних частот, и регистратор 22 фазы, генератор 23 сигналов несущей частоты и формирователь 24 опорных сигналов, выполненный в виде последовательно соединенных датчика 25 углового положения, дополнительного фильтра 26
чО
W ND
нижних частот, дополнительного нуль-компаратора 27, выход которого соединен с вторым входом регистратора 22 фазы, и соединенного С-входом параллельного регистра 28, первый и второй одиночные D-входы которого соединены с соответствующими входами датчика 25 углового положения, с управляющими входами соответствующих дополнительных ключевых модуляторов 14 и 15 и первым и вторым одиночными выходами генератора 23 несущей частоты, группа D-входов - с группой выходов генератора 23 сигналов несущей частоты и с группой управляющих входов дополнительных аппроксимэторов 16 и 17, первый и второй одиночные выходы - с управляющими входами соответствующих ключевых модуляторов 4 и 5, а группа выходов - с группой управляющих входов апп- роксиматоров 6 и 7.
Ключевые модуляторы 4. 5, 14 и 15, ап- проксиматоры 6, 7, 16 и 17, измеритель 20 значения дисбаланса и генератор 23 сигналов несущей частоты могут быть выполнены, например, как аналогичные устройства в прототипе.
Регистратор 22 фазы может быть выполнен в виде фазометра или фазового дискриминатора (в автоматическом оборудовании).
В качестве датчика 25 углового положения может быть использован, например, вращающийся трансформатор (или сельсин).
Параллельный регистр может быть выполнен, например, на микросхемах К561 ТМ2.
Устройство работает следующим образом.
В вибродатчике 1 механические колебания, вызванные центробежными силами, возникающими при вращении несбаланси- рованного ротора, преобразуются в электрический сигнал, содержащий информацию о значении и фазе дисбаланса. Фильтрацию помех, содержащихся в спектре выходного сигнала вибродатчика, осуществляют фазовые детекторы 2 и 3. Для этого с формирователя 24 опорных сигналов на управляющие входы ключевых модуляторов 4 и 5 поступают прямоугольные импульсы типа меандр с частотой F вращения баланси- руемого ротора и взаимным сдвигом фаз тг/2, а на группу управляющих входов апп- роксиматоров 6 и 7 - импульсы, дискретно изменяющие коэффициент передачи входного сигнала по синусоидальному и косину- соидальному законам п раз за один оборот ротора. Такое преобразование входного сигнала в фазовых детекторах 2 и 3 эквивалентно его умножению на синусоидальный и косинусоидальный сигналы, аппроксимированные ступенчатой функцией при равномерном квантовании во времени.
Спектр таких сигналов содержит, кроме основной гармоники,паразитные составляющие
00
U;S1 ±T8ln(nm±1)2wFt ,
, 2,3....
В процессе перемножения спектральные составляющие входного сигнала, совпадающие с основной гармоникой и указанными паразитными составляющими, переносятся на нулевую частоту, т. е. преобразуются в постоянные напряжения, несущие информацию об ортогональных составляющих вектора дисбаланса, а помехи переносятся на боковые частоты и подавляются интеграторами 8 и 9. Эквивалентная амплитудно-частотная характеристика такого фильтра имеет кроме основной полосы прозрачности на частоте F дополнительные паразитные на частотах (nm± 1)F. Ширина каждой полосы прозрачности определяется частотой среза интеграторов 8 и 9. Чем больше число п ступеней аппроксимации и чем меньше частота среза интеграторов 8 и 9, тем выше качество фильтрации. С увеличением числа п эффект повышения качества фильтрации уменьшается. 8 описываемом примере выполнения устройства используется 12 ступеней аппроксимации, которых в большинстве случаев практического применения оказывается достаточно.
Постоянные напряжения, пропорциональные ортогональным составляющим вектора дисбаланса, через открытые в режиме измерения блоки 10 и 11 памяти поступают на входы амплитудных модуляторов 12 и 13.
На управляющие входы дополнительный ключевых модуляторов 14 и 15 с первого и второго одиночных выходов генератора 23 несущей частоты поступают прямоугольные импульсы типа меандр несущей частоты f с взаимным сдвигом фаз я/2, а на группу управляющих входов дополнительных апп- роксиматоров 16 и 17 - импульсы, дискретно изменяющие коэффициент передачи входного сигнала по синусоидальному и ко- синусоидальному законам п раз за один период несущей частоты f. Преобразование входного сигнала в каждом из амплитудных модуляторов 12 и 13 эквивалентно умножению на синусоидальный и косинусоидальный опорные сигналы, аппроксимированые ступенчатой функцией при равномерном квантовании во времени. В результате амплитудной модуляции на выходе сумматора 18 формируется векторная сумма ортогональных составляющих вектора дисбаланса, каждая из которых представляет собой квазигармонический сигнал несущей частоты f. аппроксимированный ступенчатой функцией. Спектр сигнала, выделяющегося на выходе сумматора 18, кроме основной гармоники содержит составляющие
00
1
U Ј r7rF±Tsin(nm±1) 2;rft
т - 1
,2, 3...,
которые подавляются фильтром 19 нижних частот. На выходе фильтра 19 нижних частот выделяется гармонический сигнал несущей частоты f, амплитуда и фаза кото- рого несут информацикноб угле и значении вектора дисбаланса. Подключенный к выходу измеритель 20 значения дисбаланса используется для определения величины корректирующей массы.
Синхронно с балансируемым ротором вращается кинематически с ним связанный ротор датчика 25 углового положения. Датчик 25 углового положения выполнен в виде вращающегося трансформатора (или сель- сина), включенного в режиме фазовращателя. Режим фазовращателя обеспечивается питанием датчика 25 углового положения импульсами несущей частоты с взаимным сдвигом фаз л/2 (или 2л/3, если датчик уг- лового положения выполнен на сельсине). Высшие гармоники выходного сигнала датчика 25 углового положения подавляются дополнительным фильтром 26 нижних частот. Дополнительный нуль-компаратор 27 преобразует выходной сигнал дополнительного фильтра 26 нижних частот в прямоугольные импульсы, перепады которых совпадают с моментами перехода синусоиды через нуль. Фаза импульсов несущей частоты f на выходе дополнительного нуль- компаратора 27 изменяется на 2япри повороте балансируемого ротора на полный оборот. Так как положительные перепады этих импульсов являются тактирующими для параллельного регистра 28, то при каждом полном обороте ротора изменения сигнала на любом из выходов регистра 28 будут отображать изменения сигнала на его соответствующем D-входе за один период несу- щей частоты. Так, например, если принять за угол отсчета (0°) угловое положение ротора, когда фаза положительного перепада выходного сигнала дополнительного нуль- компаратора 27 совпадает с фазой положи- тельного перепада сигнала на первом входе параллельного регистра 28, то при повороте ротора на угол 180° на первом выходе параллельного регистра 28 сформируется отрицательный перепад. Так как на второй
0
D-вход параллельного регистра 28 поступают импульсы со сдвигом я/2. то на соответствующем выходе формируются положительный и отрицательный перепады при угловых положениях ротора соответственно 90 и 270°, Аналогично отображаются импульсные сигналы, приходящие на другие 0-входы параллельного регистра 28. Таким образом, выходые импульсные сигналы параллельного регистра 28 являются точными копиями соответствующих входных импульсов, перенесенных с несущей частоты f на оборотную частоту F (частоту вращения).
Время вращения балансируемого ротора при измерении дисбаланса выбирается достаточным для установления переходных процессов в интеграторах 8 и 9,По истечении указанного времени блоки 10 и 11 памяти переключаются в режим хранения (по цепям, не указанным на схеме) и вращение рото- ра прекращается. При этом гармонический сигнал несущей частоты f на выходе фильтра 19 нижних частот, содержащий информацию о параметрах дисбаланса, сохраняется.
Нуль-компаратор 21 преобразует синусоиду в прямоугольные импульсы, которые поступают на вход регистратора 22 фазы. На второй вход регистратора 22 фазы поступают импульсы несущей частоты f, фаза которых соответствует текущему угловому положению балансируемого ротора. В процессе отыскания угла коррекции дисбаланса ротор вращают, добиваясь по показаниям регистратора 22 фазы совпадения фаз его входных сигналов. При этом угол коррекции балансируемого ротора совпадает с неподвижным указателем, закрепленным на станине станка (не показан).
Таким образом, процесс поиска угла коррекции на балансируемом роторе сводится к контролю нулевого показания регистратора фазы, что уменьшает инструментальную погрешность и субъективную ошибку, вносимую оператором.
Формула изобретения
Измерительное устройство к балансировочному станку, содержащее вибродатчик, соединенные с ним первый и второй фазовые детекторы, соединенные генератор сигналов несущей частоты и формирователь опорных сигналов, первый и второй амплитудные модуляторы, соединенный с их выходами сумматор и соединенные фильтр нижних частот, вход которого соединен с выходом сумматора, и измеритель значения дисбаланса, отличающееся тем, что, с целью повышения точности измерения фазы дисбаланса, оно снабжено первым и вторым блоками памяти и соединенными нуль-компаратором, вход которого соединен с выходом фильтра нижних частот, и регистратором фазы, фазовые детекторы выполнены каждый в виде последовательно соединенных ключевого модулятора, вход которого представляет собой вход фазового детектора, аппрокси- матора и интегратора, выход которого сое динен с входом соответствующего блока памяти, амплитудные модуляторы выполнены каждый в виде соединенных дополнительного ключевого модулятора, вход которого соединен с выходом соответствующего блока памяти, а управляющий вход - с соответствующим одиночным выходом генератора сигналов несущей частоты, и дополнительного аппроксиматора, управляющие входы которого соединены с группой выходов генератора сигналов несущей
частоты, выход представляет собой выход амплитудного модулятора, а формирователь опорных сигналов выполнен в виде последовательно соединенных датчика углового
положения, дополнительного фильтра нижних частот, дополнительного нуль-компаратора, выход которого соединен с вторым входом регистратора фазы, и соединенного С-входом параллельного регистра, одиночные D-входы которого соединены с соответствующими входами датчика углового положения и соответствующими одиночными выходами генератора сигналов несущей частоты, группа D-входов - с группой выходов
последнего, одиночные выходы - с управляющими входами соответствующих ключевых модуляторов, а группа выходов - с управляющими выходами аппроксиматоров.

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420418A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1320673A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1167463A1 |
Изобретение относится к балансировочной технике. Цель изобретения - повышение точности определения угла коррекции дисбаланса за счет исключения субьектив- ных ошибок оператора. Сигнал с вибродатчика 1 поступает на фазовые детекторы 2 и 3, где выделяются ортогональные составляющие вектора дисбаланса. Постоянные напряжения с выходов фазовых детекторов 2 и 3 подаются на соответствующие блоки 10 и 11 памяти, откуда поступают на входы амплитудных модуляторов 12 и 13, переносящих ортогональные составляющие дисбаланса на частоту f генератора 23 сигналов несущей частоты. Измерение параметров дисбаланса происходит в измерителе 20 значения дисбаланса и соединенном с формирователем 24 опорных сигналов регистраторе 22 фазы, по нулевому значению которого определяется угол коррекции дисбаланса. 1 ил.
fT
Н
| Измерительное устройство к балансировочному станку | 1981 |
|
SU1010485A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1226086A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
