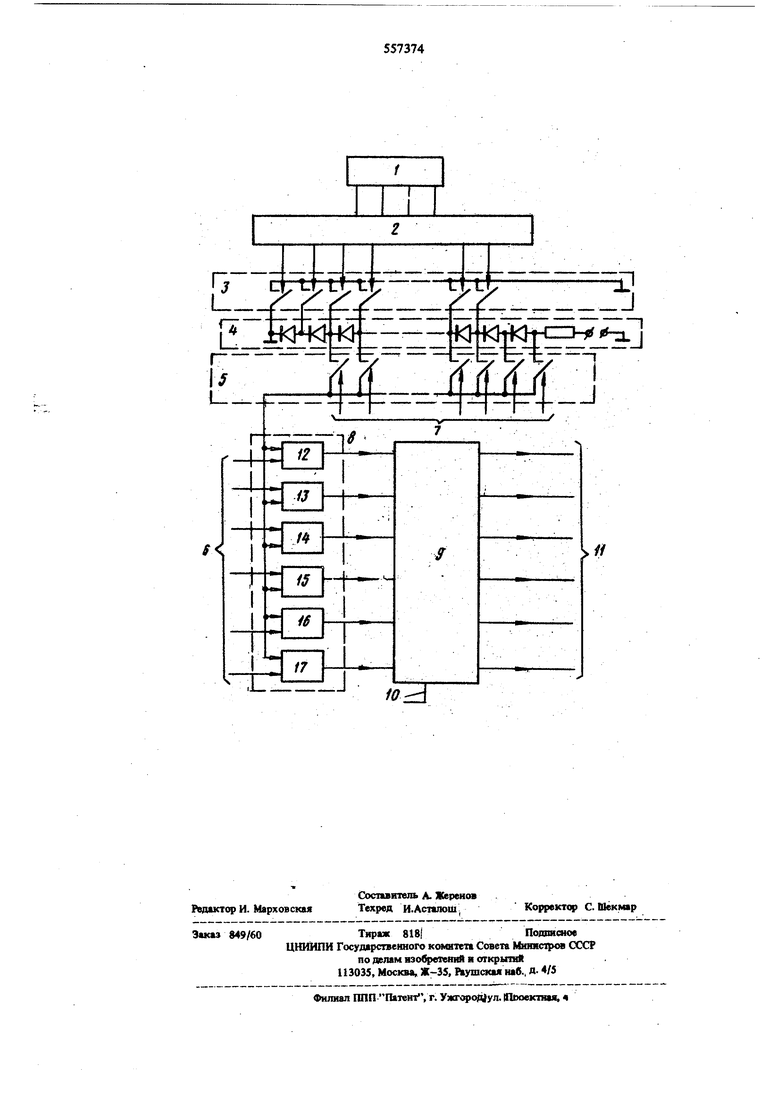
жения, Biopoii xo;i которого соеданен со вторым входом у строй„ТЕ а, выход под :пючен ко второму входу oJiOKt: срйвненчьч, «ыход деитфратора соединен со вторыл вход.ом коммутатора адреса назначе1шя. Работа устройства пояс|{яется схемой, представленной на черге; . Устгюиство содержит регастр 1 адреса; дешифратор 2; коммутаторЗад,ресаназначения блок 4 формировзлия управляющих сигналов, ДВИЖБЮ1Я коммута тара 5 адреса положения; первый вход 6 устройства; второй вход устройства; блок 8 сравнения; регистр 9 команд; управляющий вход 10 регистра команд; вьзходП устройства; пороговые схемы 12-17.. фоош1роваЕ1Ш1 представляет собой весовую сетку напряжений, на которой моделируются ащ)еса производственной лтжи, построенной в виде цени последовательно соединенных весовых элементов, количество которых ка две ед 1ницы больше адресов sorni действия транспортного механизма и на каждом из которых падает заданное напряже1ше: (весовая едишща) в определе1шой области изменений значений тока. Весовая сетка вьшолнена по принципу увеличетшя ншгряжения на одну весовую единицу с увежмением на единицу номера адреса. Выходы фор11шрователя, начиная с первого, через коммутатор адреса назначения соеданены с общей шиной laK, что qiaSaibiBSHHe в коммутаторе ключа К-того адреса зануляет К младших весов сеток. Клюш коммутатора адреса управляются со-; ответствуюинаш выходами дешифратора. Выходы формирователя, нащгаая . с третьего, через коммутатор по1юже1-1ия соединены с пороговыми схемаш) блока сравнения, которые формируют команды ншчравлегшл движения предварительного тс;рможеш1я и окончательного останова, ; причем камодому jsa указанных сигналов соответствует свой ззд;цп1ый порог. Ключи коммутатора адреса положения управляются сигналами с. датчика положения ipaifcnopTHoro средства. Регистрадреса 1-предназначен для записи, хранения и выдачи кода адреса назначения в любой системе счискенля. Дешифратор 2 - для перевода кода ащэеса назначения из принятой шстемы счисления в десятич 1ый код. Коммутатор 3 - для замыкания в соответствии с адресом назначения части весовой сетки напряжений на землю, т.е. вычитания из максимального потенциала весовой сетки потенциала адреса назначения. Блок 4 - для формироваюш управляющего напряжения, равного суммарному падению напряжения на весовых элементах, расположенных Между ключом, соответствующим заданному адресу, коммутатора назначения и , соответствующим местоположению транспортного средства, коммутатора а1Ц)еса положения. Коммутатор 5 - для подачи ка пороговые схемы блока 8 вышеуказанной разности потенциалов между напряжением, соответствующим адресу положения и напряжением адреса назначения. На первый вход 6 устройства подается опорное напряжение для срабатьтания пороговых схем. Ш второй вход 7 устройства подаются сигналы с датчиков мег.-сшшдсиканид. BjiokiS сравне1шя служит длявирабетки сигналов даижения, предварительного торможения и останова в зависимости от подаваемого на него с коммутатора адреса положения управляющего напряжения. В состав блока 8 входят: пороговая схема 12, вярабатьшаюшая сигнал Движение вправо ; поро грвая схема 13, вырабатьшающая скгаяя Движение влево ; пороговая схема 14, вырабатьшающая сигнал Предварительное торможение при движении вправо ; пороговая схема 15,: Ш11рабатьтающая ;сигнал.Оса:аПов при даиженш1 1 о.;.лорйговая схема 16, вырабатывающая отгнап Предварительное торможение при движении влево ; пороговая схема 17, вырабатьшающая сигнал Останов при движении влево. , Регистр команд 9 предназначен для лопгческой обработки, хранения и выдачи сигаалов напряжения движения, предварительного торможения и окончательного останова. С помощью сигналов, поступающих на управляющий вход 10, осуществляется разрешение иа автоматическую работу всего уст ройства и для прерьгва шя работы в аварийных ситуациях. Исходные режимы работы устройства: номер К-того ащ)еса назначения записан в регистре I; К-тая шина дешифратора 2 воздействует на К-ьш ключ коммутатора 3. Указанный ключ зануляетК- младших элементов весовой сетки напряжений; транспортное средство находится около i-того адреса. Датчик (-того адреса воздействует на i-ый ключ коммутатора 5, замьшающего цепь выхода i+2 элемента весовой сетки на шину входов пороговых устройств. При этом никакой другой датчик фабатьтать не может, поэтому замыкание двух и более ключей коммутатора 5 исключается. Устройство работает следующим образом: если i Ь, то с общей шины коммутатора 5 на входы пороговых схем блока 8 поступает напряжение, которое вызывает фабатьшание схемы 13. Если при этом на входе 10 есть разрешающий онгнал, то срабатьтание пороговой схемы фиксируется соответствующим триггером .регистра команд. Сигнал с этого триггера постуиает на выход устройсгоа и далее в исполнительный блок транспортного, средства, после чего тот начинает движение влево. При ;зэижеиии влево транспортного средства проходит: ; i-1; i-2; и т.д. до п+1 адреса, датчики этих адресов вызьтают срабатьшание последовательно соответствующих ключей коммутатора 5. При этом с блока 4 . в блок 8 поступает напряжение, при котором происходит фабатьшание схемы 16 блока 8 и переход транспортного механизма на пониженную скорость движения. После достижения транспортного средства п-того адреса с весовой сетки снимается напряжение.
которое вызьшает срабатьшаш е пороговой схемы 17 блока 8 и останов транспортного средства около заданного адреса. EcjmlOi, то напряжеяме (+2-К)2Уо,аеслик тому же + l, то . В обоих случаях в блоке 8 схема 12 вырабатьшает команду Движение вправо. При движении вправо транспортного средства в коммутаторе последовательно срабатьшают ключи i; i + 1; i+2; и т.д. доК-1 При фабатьшаиии К-1 ключа из блока 5 в блок 8 поступает первое ненулевое напряжение. При этом происходит срабатывание схемы 14 блока 8 и переход транспортного средства на пониженную скорость движения.
После достижения К-того адреса с весовой ветки снимается напряжение, которое вызьшает срабатьшание схемы 15 блока 8 и останов транспортного федстаа около заданного адреса.
Команда Предварительное торможение предназначена для улучшения динамических характеристик высокоскоростных транспортных механизмов.
В случае неправильной адресации транспортного федства, т.е. несовпадения адреса, записанного в регистре 1, и адреса места останова блок формирования 4 будет вьщавать соответствующее напряжение, которое приведет к появлению командьк на движение в соответствующую сторону, таким образом, произойдет коррекдия отклонения.
Блок формирования 8 вместе с коммутаторами 3 и 5 создает регулирующий контур точного останова транспортного средства, обеспечивая выcoKyio достоверность его перемещений по заданному адресу.
Формула изобретения
Устройство для управления транспортными средствами, содержащее регистр адреса, соединенный выходом со входом дешифратора, блок срав нения, первый вход которого соединен с первым
ВХОДОМ устройства, выход - через регистр команд подключен к выходу устройства, управляющий вход которого соединен с управляющим входом регистра команд, отличающееся тем, что, с целью повышения надежности работы, в него введены коммутаторы адреса назначения и адреса положения и блок формирования управляющих сигналов движения, первый выход которого подключен к первому входу коммутатора адреса назначения, второй выход - к первому входу коммутатора
адреса положения, второй вход которого соединен со вторым входом устройства, выход подключен ко второму входу блока сравнения, выход дешифратора соединен со вторым входом коммутатора адреса назначения.
Источники информащш, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР G 05 в 19/28 №394755,8.02.1971.
2.Патент США кл. 340-1725 Мкл G 06 К 17/00, №3803556,1974. .
3.Авторское свидетельство СССР G 06 f 15/501 ,N 360666,15.04.1969.
ЛГ---
,1(1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортными средствами | 1977 |
|
SU693385A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для сопряжения ЭВМ в вычислительную систему | 1986 |
|
SU1357971A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| УСТРОЙСТВО ДЛЯ ПСИХОФИЗИОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ | 1993 |
|
RU2110955C1 |
| Устройство для торможения бесконтактного двигателя постоянного тока | 1981 |
|
SU1020952A1 |
| Устройство контроля | 1985 |
|
SU1291931A1 |
| Устройство для сопряжения внешних устройств с накопителем на магнитной ленте | 1984 |
|
SU1348842A1 |
| Устройство для моделирования графов | 1984 |
|
SU1228111A1 |