113
Изобретение относится к системам автоматического управления транспортным средством, передвигающимся по ветвящейся трассе-ориентиру, и может быть использовано, например, для управления внутрицеховым робокаром в . гибком автоматическом производстве.
Целью изобретения является расширение функциональных возможностей устройства за счет идентификации станции назначения, повьшения точности останова, а также автоматического формирования кратчайшего маршрута движения..
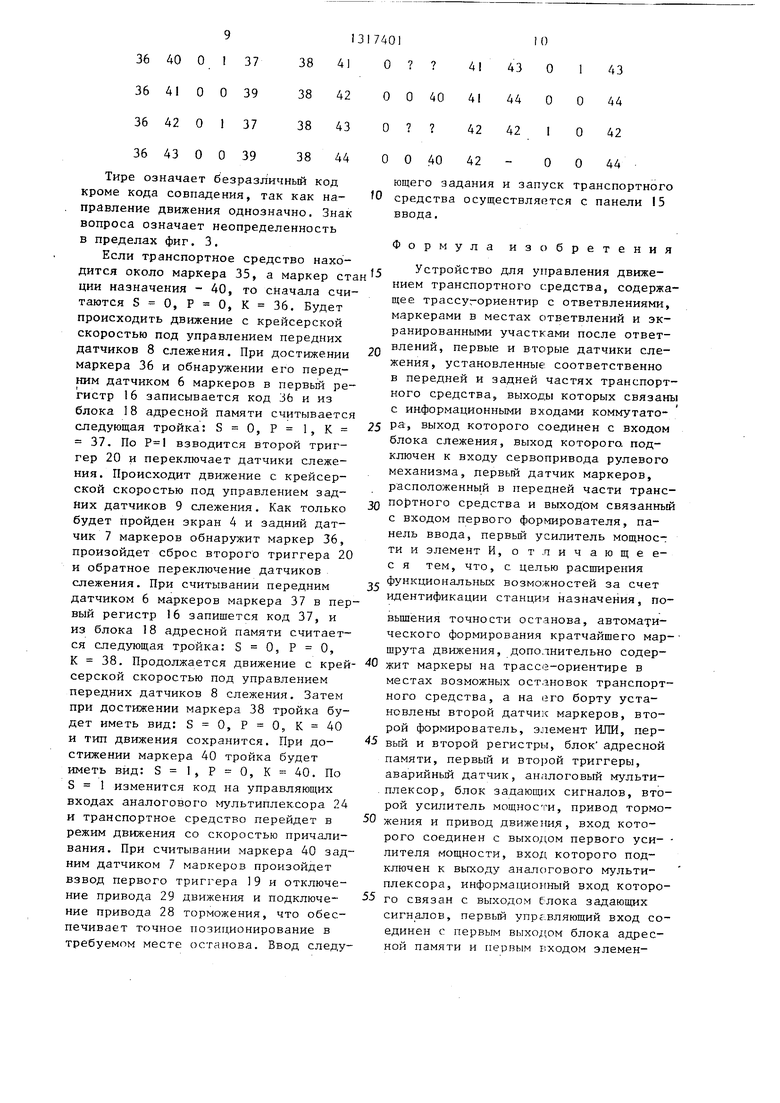
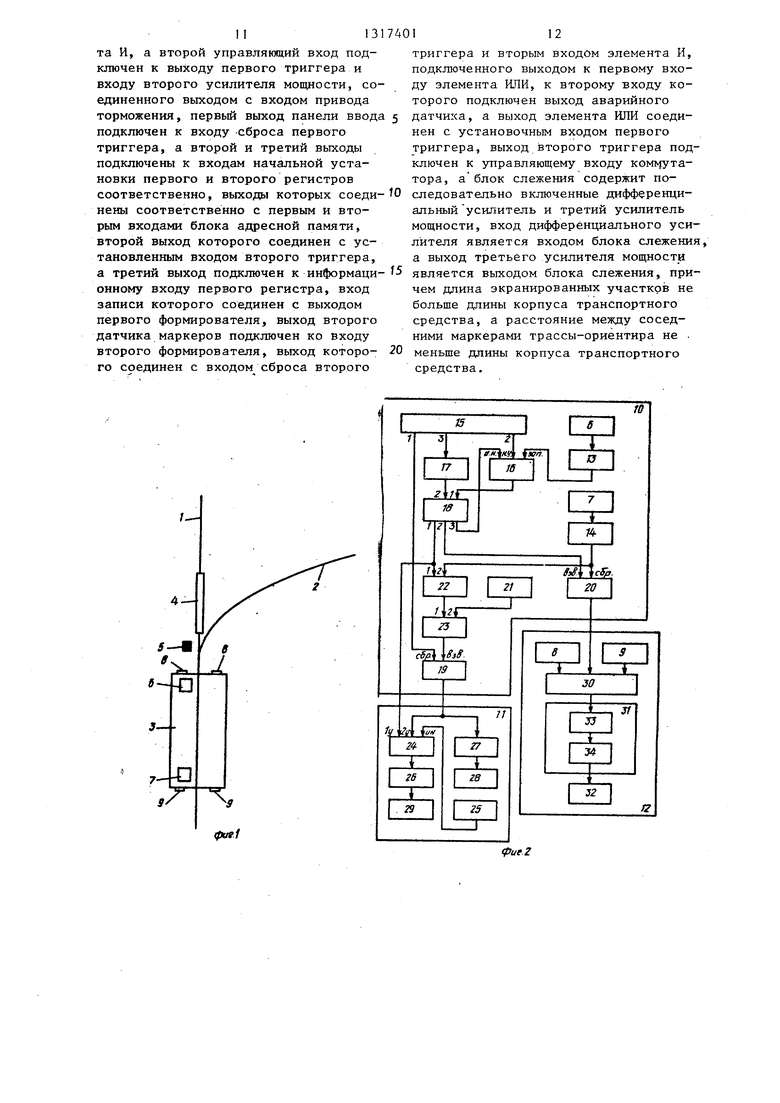
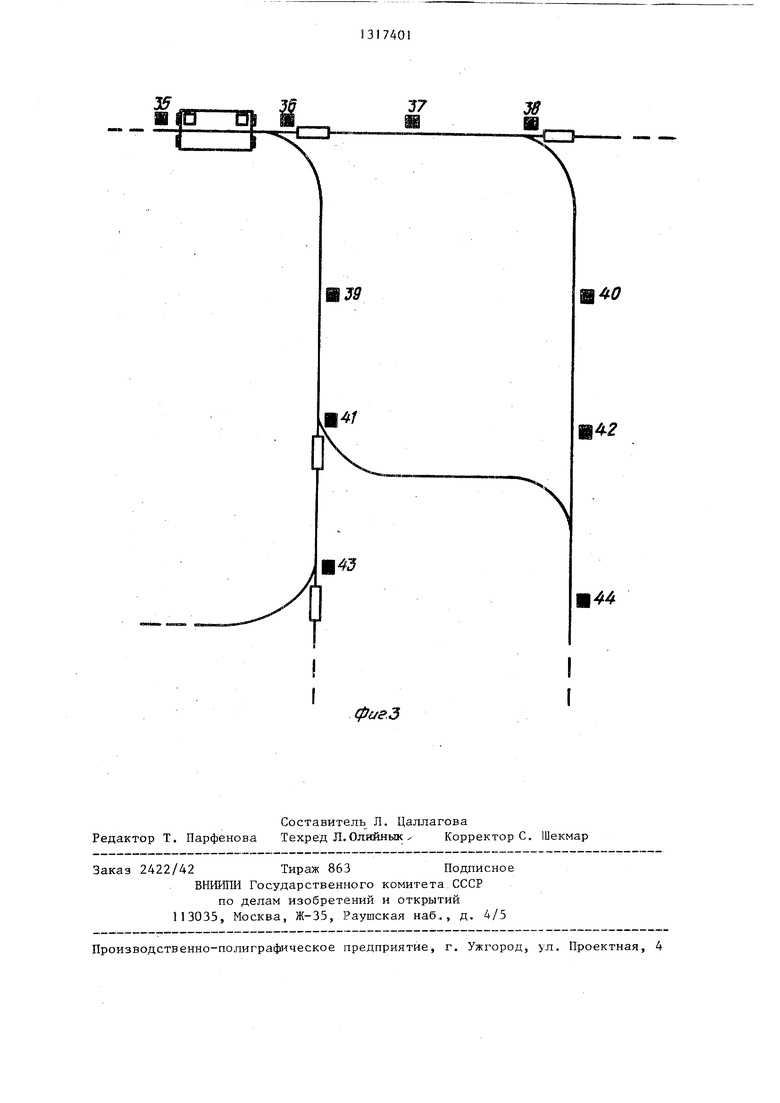
На фиг. 1 приведено транспортное средство на участке развилки трассы- ориентира; на фиг. 2 - структурная схема устройства для управления движением транспортного средства; на фиг. 3 - пример участка трассы-ориентира.
Сущность изобретения заключается в организации управления транспортным средством при выполнении им очередного .транспортного задания на основе конкатенации (сочленения) начальных управлений некоторой соответствующей последовательности транспортных заданий. Перед внедрением устройства на трассе-ориентире осуществляется сквозное кодирование всех маркеров натуральными числами 1,2,.... Направление движения по каждому пе- регону ( участку трассы-ориентира между смежными маркерами ) задано. Любое транспортное задание состоит в указании пары кодов (i,j), где i - код маркера текущего расположения транспортного средства; j - код маркера станции назначения. Соотв-етст- вующее начальное управление определяется тройкой (К, Р, S), где К - код первого встречного маркера по кратчайшему маршруту движения к станции назначения; Р - признак наличия экрана на указанном перегоне к первому встречному маркеру; S - признак останова. Такие начальные управления легко определяются по графу трассы- ориентира вручную заранее на зтапе внедрения устройства для всех возможных транспортных заданий и записываются в ячейки адресной памяти по ад- :ресу i j (конкатенация). При этом используется тот факт, что путь, полностью принадлежащий какому-либо кратчайшему пути, также является кратчайшим, что позволяет не описы5
0
4012
вать такие пути, а выбирать их из описанных путей, которым они принадлежат.
Старший разряд отводится под признак останова S, следующий за ним разряд - под признак.наличия экрана Р, а остальные разряды - под код маркера К. Признак останова S равен 1 во всех ячейках по адресам i i,
что означает достижение станции назначения. Остальные разряды по зтим адресам могут быть произвольными, например О.
При выполнении транспортного задания процесс управления транспортным средством осуществляется на двух уровнях. На верхнем уровне управления обеспечивается выбор маршрута движения, а именно, на каждом перегоне определяется н;шичие движения над экранированным участком, выбор крейсерской скорости движения или скорости причаливания, идентификация станции назначения и выработка команды останова. Выбор маршрута производится на основании считываемых из блока адресной памяти данных. Адрес считываемых данных изменяется каждый раз при фиксировании маркера первым (передним) датчиком маркеров. Старшие разряды адреса считываются из первого регистра - код текущего маркера, а младшие - из второго .регистра - код маркера станции назначения.
5 Из блока адресной памяти считываются признак наличия экрана Р, код первого встречного маркера К, который переписывается в первый регистр при его достижении транспортным, средст вом, и признак останова S, служащий для идентификации станции назначения. При считывании признака останова транспортное средство переходит в режим движения со скоростью причали вания, и при обнаружении маркера вторым (задним) датчиком маркеров включается торможение и транспортное средство останавливается. Для точного позиционирования транспортного
0
5
средства около станц.ии назначения маркер каждой станции должен быть уста- - новлен на трассе-ориентире с учетом останова транспортного средства по второму (заднему) датчику маркеров.
При считывании признака наличия экрана происходит переключение датчиков слежения - вместо первых (передних) подключаются вторые (задние).
Обратное их переключение происходит при обнаружении маркера вторым (задним) датчиком маркеров, что происходит после того, как передние датчики слежения пройдут над экранированным участком. При возникновении сигнала с аварийного датчика (обнаружение ; препятствия и т.п.) транспортное сред средство переходит в режим торможения.
На нижнем уровне управления осуществляется реализация маршрута движения и выработанных на верхнем уровне команд, а именно аналоговое управление сервоприводом рулевого механизма и приводами движения и торможения. При движении транспортного средства над экраном отслеживание трассы-ориентира осуществляется вторыми (задними) датчиками слежения, во всех остальных случаях - первьми (передними) датчиками слежения. Переключение датчиков слежения обеспечивается двухканальным аналоговым коммутатором. Сигнал, представляющий текущее положение транспортного средства относительно трассы-ориентира, формируется на выходе дифференциального усилителя как разность сигналов от первых (передних) или вторых (задних) датчиков слежения, усиливается в третьем усилителе мощности и подается на сервопривод рулевого механизма. Привод движения транспортного средства осуществляет его останов или движение как с крейсерской скоростью, так и со скоростью причаливания. Указанным режимам соответствуют различные сигналы, получаемые параллельно на выходе блока задающих сигналов. Подключение тех или иных сигналов к входу привода движения через первый усилитель мощности обеспечивается аналоговым мультиплексором, упраляемым командами Движение - торможение и Крейсерская скорость - -скорость причаливания, поступающими из блока адресной памяти и первого триггера. Команда Движение - торможение через второй усилитель мощности подается также на привод торможения, производя останов транспортного средства.
На чертежах приняты следующие обозначения: прямой участок 1 трассы- ориентира, ответвление 2 трассы-ориентира, транспортное средство 3, экранированный участок 4, маркер 5.
4014
датчики 6 и 7 маркеров, датчики 8 и 9 слежения, устройство 10 адресования , устройство 11 переключения движений, устройство 12 слежения, фор- мирователи 13 и 14, панель 15 ввода, регистры 16 и 17, блок 18 адресной памяти, триггеры 19 и 20, аварийный датчик 21, элемент И 22, элемент ИЛИ 23, аналоговый мультиплексор 24,
О блок 25 задающих сигналов, усилители 26 и 27 мощности, привод 28 торможения, привод 29 движения, коммутатор 30, блок 31 слежения, сервопривод 32 рулевого механизма, дифферен5 циальный 33 усилитель, усилитель 34 мощности, маркеры 35-44.
Трасса-ориентир выполнена в виде активно излучающей направляющей, например провода с высокочастотным то0 ком, или в виде пассивной направляющей, например обесточенной металлической фольги. Развилка трассы-ориентира включает прямой участок 1 и ответвление 2, выполненное с радиу-5 сом, соответствующим техническим данным транспортного средства 3. С места ответвления прямой участок содержит экранированный участок 4. При использовании излучающей трассы-ориен0 тира экранированный участок 4 обеспечивается металлической трубой, служащей для гашения излучения, а при пассивной - физическим разрывом направляющей. Около места ответвления
5 устанавливается маркер 5 этой развилки, например постоянный магнит. Такие же маркеры размещаются на трассе-ориентире в местах возможных остановок транспортного средства. На борту
0 транспортного средства размещены первый (передний) 6 и второй (задний) 7 датчики маркеров, первые (передние) 8 и вторые (задние) 9 датчики слежения, устройство 10 адресования, уст5 ройство 1 1 переключения движений и устройство 12 слежения.
Устройство 10 адресования содержит первый 6 и второй 7 датчики маркеров, первый 13 и второй 14 формирователи, панель 15 ввода, первый (кода текущего маркера) 16 и второй (кода станции назначения) 17 регистры, блок 18 адресной памяти, пер- вый 19 и второй 20 триггеры, аварийный датчик 21, элемент И 22 и эле- .мент ИЛИ 23.
Устройство 11 переключения движе- НИИ содержит аналоговый мультиплек0
513
сор 24, блок 25 задающих сигналов, первый 26 и второй 27 усилители мощности, привод 28 торможения и привод 29 движения.
Устройство 12 слежения содержит первые 8 и вторые 9 датчики слежения коммутатор 30, блок 31 слежения и сервопривод 32 рулевого механизма, а блок 31 слежения включает в себя дифференциальный усилитель 33 и тре- тий усилитель 34 мощности, включенные последовательно.
Выходы датчиков 6 и 7 маркеров соединены соответственно через формирователи 13 и 14 с входом записи первого регистра 16 и входом сброса второго триггера 20, который связан также с вторым входом элемента И 22 выход которого подключен к первому входу элемента ИЛИ 23, второй вход которого соединен с выходом аварийного датчика 21, а выход соединен с входом установки первого триггера 19 вход сброса которого подключен к первому выходу панели 15 ввода, второй и третий входы которой соединены соответственно с входами начальной установки первого 16 и второго 17 ре- .гистров,выходы которых подключены соответственно к первому и второму входам блока 18 памяти, третий выход которого соединен с информационным входом-первого регистра 16, второй выход соединен с входом установки второго триггера 20, а первый вход соединен с первым входом элемента И 2 и первым управляющим входом аналогового мультиплексора 24, выход которого через первый усилитель 26 мощности подключен к входу привода 29 дви- жения, блок 25 задающих сигналов подключен к информационному .входу аналогового мультиплексора 24, второй управляющий вход которого соединен с выходом первого триггера 19 и через второй усилитель 27 мощности - с входом привода 28 торможения, выходы датчиков 8 и 9 слежения подключены к информационным входам коммутатора 30, управляющий вход которого под- ключен к выходу второго триггера 20, а выход которого через поспедователь- но соединенные дифференциальный усилитель 33 и третий усилитель 34 мощности связан с входом сервопривода 32 рулевого механизма.
В первый регистр 16 в отличие от стандартного регистра данные могут
16
записываться по двум различным шинам Он может быть выполнен в виде Последовательно включенных мультиплексора подключающего к своему выходу одно из двух ВХОДЯ1ДИХ слов в зависимости от сигналов регистра 16, например микросхемы K531KII1I, и обычного регистра, например микросхемы К589ИР12 включенного в режим постоянной выдачи данных и записи новых данных по сигналу записи.
Все остальные блоки предлагаемого устройства являются общеизвестными. В структуре адресной памяти в качестве триггеров можно использовать Р- триггеры. При использовании в качестве маркеров на трассе-ориентире постоянных магнитов датчики маркеров выполняются на основе герконов. Формирователи построены на основе формирователей сигналов бесконтактных датчиков К1102АП1. В качестве анало- ГОВО.ГО мультиплексора берется аналоговый коммутатор К590КИ1. Блок задающих сигналов представляет собой блок питания на три напряжения, соответствующих останову транспортного средства, его движению с крейсерской скоростью и со скоростью причаливания. Усилители мощности реализуются на микросхемах К174УН1. Коммутатор получается объединением управляющих входов двух микросхем аналоговых переключателей КР143ТК1. В качестве дифференциального усилителя берется микросхема К118УД1А. Сервопр ивод рулевого механизма реализуется по из вестной схеме.
Устройство работает следующим образом.
Первоначально в блок 18 адресной памяти устройства 10 адресования записываются тройки начального управления, соответствующие данной транспортной сети. Затем с панели 15 ввода в первый регистр 16 записывается код маркера текущего расположения транспортного средства, а во второй регистр 17 - код маркера станции назначения. По сигналу запуска с панели 15 ввода производится сброс первого триггера 19, в результате чего через второй усилитель 27 мощности отключается привод 28 торможения устройства 11 переключения движения, и из блока. 25 задающих сигналов через аналоговый мультиплексор 24 и первый усилитель 26 мощности на привод дви713
жения подается сигнал, соответствующий коду движения, задаваемому признаком останова S из блока 18 адресной памяти. Если S О, то осуществляется движение с крейсерской скоростью, если S 1, то достигнута :станция назначения и движение происходит со скоростью причаливания. Останов производится при установке первого триггера 19, когда отключается привод движения и подключается привод торможения. Это происходит либо в случае сигнала от аварийного датчика 21, либо при получении от второго датчика 7 марк-еров сигнала через второй формирователь 1 в случае, когда достигнута станция , назначения, т.е. S 1. Такая логика работы обеспечивается элементами И 22 и ИЛИ 23. После любого останова запуск транспортного средства осуществляется с панели 15 ввода сбросом первого триггера 19. Причем, если останов произошел по сигналу от аварийного датчика 21, то возобновление движения транспортного средства 3 произойдет из того состояния, в котором оно было прервано. При движени транспортного средства вдоль направляющей трассы-ориентира, т.е. ее прямого участка I или ответвления 2, коммутатор 30 подключает первые (передние) датчики 8 слежения устройства 12 слежения к входу дифференциального усилителя 33, с выхода которого разность сигналов от датчиков поступает на усиление в третий усилитель 34 мощности и оттуда подается на сервопривод 32 рулевого механизма При необходимости прямого прохождения развилки, т.е. над экраном 4, для соответствующего участка трассы- ориентира из блока 18 адресной памяти считывается признак наличия экрасДанные
351О35
-ОО36 361О36
370137 38О137 39ОО39
Адрес
3644
3737 37
3838 38 39
Данные Адрес
О О 39 39
1 О 37
39
0О 38 40
1О 38 40
О
39
40
41 41
38 40. О О 40 4 42
8
на , по которому устанавливается второй триггер 20, выход которого является управляющим входом коммутатора 30, в результате чего вместо
первых (передних) датчиков 8 слежения к дифференциальному усилителю 33 подключаются вторые (задние) датчи- ки 9 слежения. Поскольку задние датчики слежения находятся над прямым участком направляющей, то транспортное средство продолжает двигаться прямо. При обнаружении маркера 5 развилки вторым (задним) датчиком 7 маркеров происходит сброс второго
триггера 20 и обратное переключение датчиков слежения. Так как длина экрана 4 меньше расстояния между датчиками 6 и 7 маркеров, то первые (передние) датчики 8 слежения будут находиться уже за зоной экрана 4 .и транспортное средство 3 будет продолжать обычное движение. Изменение управляющих признаков S и Р, поступающих из блока 18 адресной памяти, происходит в момент перехода с одного участка трассы-ориентира на другой при считывании маркера первым (передним) датчиком 6 маркеров. При этом через первый формирователь 13 подается сигнал записи в первый регистр 16 кода маркера текущего расположения транспортного средства, равного коду К с третьего выхода блока 18 адресной памяти. После этого из блока 18 памяти ,по адресу, равному конкатенации содержимого первого 16 и второго 17 регистров, считывается новая управляющая тройка (К, Р, S), соответствующая следующему
участку трассы-ориентира.
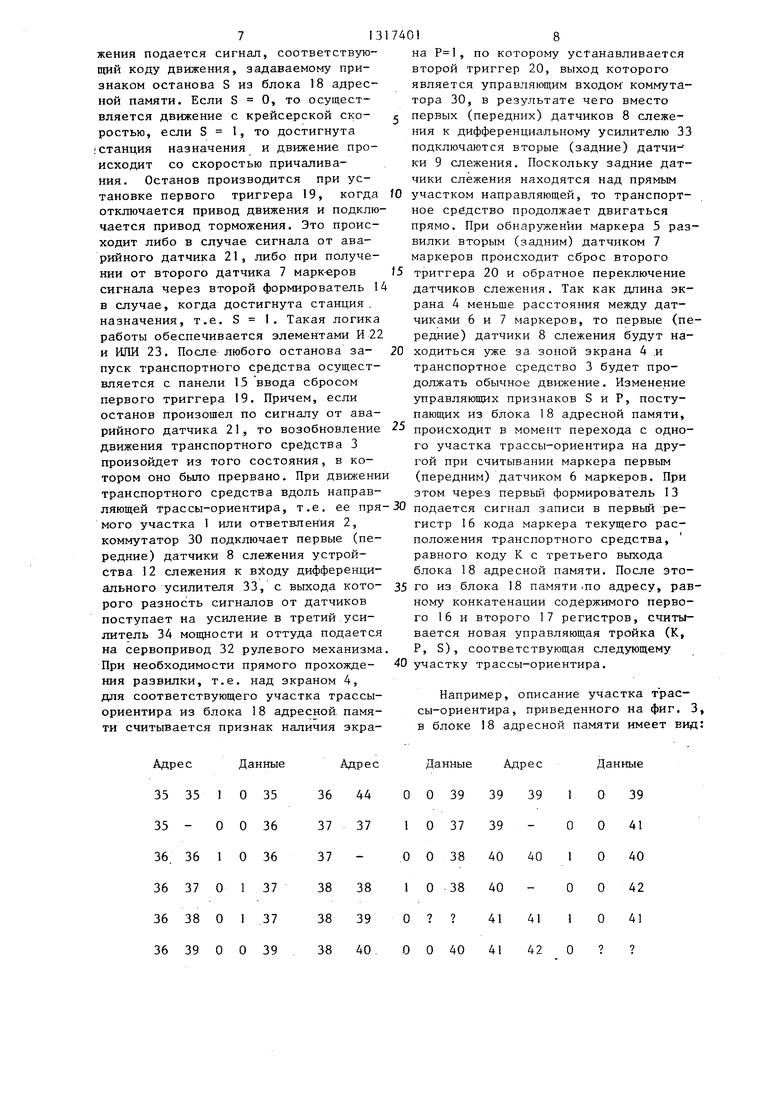
Например, описание участка трассы-ориентира, приведенного на фиг. 3, в блоке 18 адресной памяти имеет вид:
Данные Адрес
О О 39 39
39
1 О 37
39
О 38 40
О 38 40
40
41 41
36 40 01 37 36 41 О О 39 36 42 О 1 37
36 43 О О 39
Тире означает безразличный код кроме кода совпадения, так как на- правление движения однозначно. Знак вопроса означает неопределенность в пределах фиг. 3.
Если транспортное средство находится около маркера 35, а маркер ст ции назначения - 40, то сначала считаются , , . Будет происходить движение с крейсерской скоростью под управлением передних датчиков 8 слежения. При достижении маркера 36 и обнаружении его передним датчиком 6 маркеров в первый регистр 16 записывается код 36 и из блока 18 адресной памяти считывается следующая тройка: ,,K 37. По взводится второй триггер 20 и переключает датчики слежения. Происходит движение с крейсерской скоростью под управлением задних датчиков 9 слежения. Как только будет пройден экран 4 и задний датчик 7 маркеров обнаружит маркер 36, произойдет сброс второго триггера 20 и обратное переключение датчиков слежения. При считывании передним датчиком 6 маркеров маркера 37 в первый регистр 16 запишется код 37, и из блока 18 адресной памяти считается следующая тройка: S О, Р О, К 38. Продолжается движение с крей серской скоростью под управлением передних датчиков 8 слежения. Затем при достижении маркера 38 тройка будет иметь вид: S О, Р О, К 40 и тип движения сохранится. При до- стижении маркера 40 тройка будет иметь вид: S 1 , Р О, К 40. По S 1 изменится код на управляющих входах аналогового мультиплексора 24 и транспортное средство перейдет в режим движения со скоростью причаливания. При считывании маркера 40 задним датчиком 7 маркеров произойдет взвод первого триггера 19 и отключение привода 29 движения и подключе- ние привода 28 торможения, что обеспечивает точное позиционирование в требуемом месте останова. Ввод следу43 О
43
44 О О 44
42
О 42
О О
44
шщего задания и запуск транспортного средства осуществляется с панели 15 ввода.
Формула изобретения
Устройство для управления движением транспортного средства, содержащее трассугориентир с ответвлениями, маркерами в местах ответвлений и экранированными участками после ответвлений, первые и вторые датчики слежения, устано зленные соответственно в передней и задней частях транспортного средства,, выходы которых связаны с информационными входами коммутатора, выход которого соединен с входом блока слежения, выход которого, подключен к входу сервопривода рулевого механизма, первый датчик маркеров, расположенный в передней части транспортного средства и выходом связанный с входом первого формирователя, панель ввода, первьм усилитель мощности и элемент И, о т л и ч а ю щ е е- с я тем, что, с целью расширения функциональных возможностей за счет идентификации станции назначения, повышения точности останова, автоматического формирования кратчайшего маршрута движения, дополнительно содержит маркеры на трассе-ориентире в местах возможных остановок транспортного средства, а на его борту установлены второй датчик маркеров, второй формирователь, элемент ИЛИ, первый и второй регистры, блок адресной памяти, первый и второй триггеры, аварийный датчик, аналоговый мультиплексор, блок задающих сигналов, второй усилитель мощности, привод торможения и привод движения, вход которого соединен с выходом первого уси- лителя мощности, вход которого подключен к выходу аналогового мультиплексора, информа1даокный вход которого связан с выходом блока задающих сигналов, первый управляющий вход соединен с первым выходом блока адресной памяти и первым входом элеменII13
та и, а второй управляющий вход подключен к выходу первого триггера и входу второго усилителя мощности, соединенного выходом с входом привода торможения, первый выход панели ввода подключен к входу .сброса первого триггера, а второй и третий выходы подключены к входам начальной установки первого и второго регистров соответственно, выходы которых соединены соответственно с первым и вторым входами блока адресной памяти, второй выход которого соединен с установленным входом второго триггера, а третий выход подключен к информационному входу первого регистра, вход записи которого соединен с выходом первого формирователя, выход второго датчика маркеров подключен ко входу второго формирователя, выход которого соединен с входом сброса второго
O
40112
триггера и вторым входом элемента И, подключенного выходом к первому входу элемента ИЛИ, к второму входу которого подключен выход аварийного датчика, а выход элемента ИЛИ соединен с установочным входом первого триггера, выход второго триггера подключен к управляющему входу ком гута- тора, а блок слежения содержит последовательно включенные дифференциальный усилитель и третий усилитель мощности, вход дифференциального усилителя является входом блока слежения, а выход третьего усилителя мощности f5 является выходом блока слежения, причем длина экранированных участков не больше длины корпуса транспортного средства, а расстояние между соседними маркерами трассы-ориентира не меньше длины корпуса транспортного средства.
0
J5 ,
miS
D
У9
fv
;j7
j
40
Щ42

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство управления движением транспортного средства | 1990 |
|
SU1837328A1 |
| Устройство для выбора кратчайшего маршрута | 1985 |
|
SU1295412A1 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Устройство для управления транспортным средством | 1987 |
|
SU1469499A1 |
Изобретение относится к системам автоматического управления движением внутрицеховых транспортных роботов. Цель изобретения - автоматическое формирование кратчайшего маршрута движения и команд его реализации, идентификация станции назначения и точный останов около ее маркера. В блоке адресной памяти по адресам, являющимся конкатенацией кодов станций текущего расположения транспортного средства и его назначения, записываются код следующей станции по кратчайшему маршруту, признак движения над экранированным участком трассы-ориентира и признак останова, которые считываются из него при обнаружении маркера станции первым датчиком маркеров и на основании которых вырабатываются команды подключения передних или задних датчиков слежения, включения привода движения в режим быстрого или медленного движения с пocлeдyюпц м отключением привода движения и вко1ючением привода торможения при обнаружении маркера станции назначения вторым датчиком маркеров. 3 ил. с (Л 00 ч 4: О
44
Составитель Л. Цаллагова Редактор Т. Парфенова Техред Л..
ЗакаГ2422/42 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-пол
играфическое предприятие, г. Ужгород, ул. Проектная, 4
фиг.З
