Изобретение относится к автоматическому управлению, в частности к системам управления транспортными средствами, передвигающимся по разветвленным трассам-ориентирам, и является усовершенствованием устройства по авт. св. № 1317401.
Известное устройство для управления движением транспортного средства содержит трассу-ориентир с развилками, экранированные участки в прямых продолжениях развилок, маркеры,в местах развилок и возможных остановок транспортного средства, а на его борту передние и задние датчики слежения и датчики маркеров, установленные соответственно в передней и задней части транспортного средства, два формирователя, панель ввода, два регистра, блок адресной памяти, два RS-триггера, аварийный датчик, элементы И и ИЛИ, аналоговый мультиплексор, блок задающих сигналов, три усилителя мощности, приводы движения и торможения, коммутатор, дифференциальный усилитель и сервопривод рулевого механизма, причем выходы передних и задних датчиков слежения связаны с информационными входами коммутатора, выход которого соединен с входом дифференциального усилителя, выход переднего датчика маркеров через первый формирователь связан с входом записи первого регистра, выход которого соединен с шиной младшей группы адресных разрядов блока адресной памяти, шина старшей группы адресных разрядов которого связана с выходом второго регистра, а первый выход соединен с первым входом элемента И и первым управляющим входом аналогового мультиплексора, выходы пуска, кода станции отправления и кода станции назначения панели ввода подключены соответственно к входу первого сброса первого RS-триггера, входу начальной установки первого регистра и входу второго регистра, второй выход блока адресной памяти соединен с входом взведения второго RS-триггера, выход которого подключен к управляющему входу коммутатора, выход заднего датчика маркеров через второй формирователь связан с входом сброса второго RS-триггера и вторым входом элемента
И, выход которого подключен к первому входу элемента ИЛИ, выход аварийного датчика связан с вторым входом элемента ИЛИ, выход которого соединен с входом взведения первого RS-триггера, выход аналогового мультиплексора через первый усилитель мощности связан с приводом движения, выход первого RS-триггера соединен с вторым управляющим входом аналогового мультиплексора и через второй усилитель мощности с приводом торможения, шина выхода блока задающих сигналов связана с шиной информационного входа аналогового мультиплексора, выход дифференциального усилителя через третий усилитель мощности соединен с сервоприводом рулевого механизма, третий выход блока адресной памяти связан с информационным входом первого регистра, причем длина экранированных
участков не более длины корпуса транспортного средства, а расстояние между соседними маркерами трассы-ориентира не меньше длины корпуса транспортного средства.
Недостатком устройства является невозможность оперативного изменения состава и размещения станций транспортной сети без изменения устройства, а именно без замены или переформирования его блока адресной памяти, что ограничивает сферу применения указанного устройства. Необходимость оперативного изменения состава и размещения станций транспортной сети возникает, например, в мелкосерийном производстве при частичной замене оборудования в процессе изменения номенклатуры выпускаемой продукции или, например, при автоматизации внутренних транспортных операций на перевалочных
базах, где точное позиционирование внешнего транспорта, в частности железнодорожного состава, относительно заранее зафиксированных станций погрузки-разгрузки не представляется возможным.
Целью изобретения является расширение области применения устройства для уп- равления движением транспортного средства за счет обеспечения адаптивности устройства к изменениям транспортной сети.
Цель достигается тем, что в устройство для управления движением транспортного средства введены дополнительные переносные маркеры около трассы-ориентира, устанавливаемые в центрах радиальных съездов транспортного средства к дополнительным станциям транспортной сети, а на борту транспортного средства размещаемые в его средней части на боковых поверхностях левый и правый датчики центрирования, D-триггер, датчик пройденного пути, вторые элементы И и ИЛИ, Т- триггер, сдвиговый регистр, схема временной задержки, второй коммутатор, элемент ИЛИ-НЕ, вычитающий счетчик, причем первый выход блока адресной памяти связан с входом разрешения счета вычитающего счетчика, выход равенство нулю которого соединен с первым входом второ- го элемента И, подключенного выходом к первому входу второго элемента ИЛИ, выход которого связан с входом разрешение счета датчика пройденного пути и вторым управляющим входом коммутатора, выходы признака направления съезда и кода дополнительной станции панели ввода связаны соответственно с информационным входом сдвигового регистра и входом начальной установки вычитающего счетчика, выходы признаков равенства и неравенства нулю которого соединены соответственно с первым входом элемента ИЛИ-НЕ и информационным входом D-триггера, прямым выходом связанного с вторым входом вто- рого элемента И, а инверсным выходом - с третьим входом первого элемента И и вторым входом элемента ИЛИ-НЕ, выход которого соединен с третьим управляющим входом аналогового мультиплексора,под- ключенного четвертым управляющим входом к прямому выходу Т-триггера и второму входу второго элемента ИЛИ, выход блока временной задержки соединен с вторым входом сброса первого RS-триггера, инвер- сный выход которого связан с входом начальной установки датчика пройденного пути, выход признака завершения которого соединен с третьим входом элемента ИЛИ и со счетным входом Т-триггера, подклю- ченного инверсным выходом к входу блока временной задержки и входу сдвига сдвигового регистра, выход которого связан с управляющим входом второго коммутатора, к первому и второму информационным вхо- дам которого подключены соответственно выходы левого и правого датчиков центрирования, первый выход второго коммутатора подключен к счетному входу вычитающего счетчика, а второй выход к
третьему информационному входу первого коммутатора.
Перечисленные выше новые блоки и связи в указанной совокупности в устройствах для управления движением транспортного средства и других устройствах неизвестны.
Благодаря введению новых блоков и связей устройство приобретает новые свойства, а именно обеспечивает возможность оперативного изменения состава и размещения станций транспортной сети без изменения устройства, чего не обеспечивают известные устройства.
Сущность изобретения заключается в следующем. На однонаправленной и замкнутой трассе-ориентире расположены два типа маркеров: основные и дополнительные. Основные маркеры определяют конфигурацию транспортной сети и позиции возможных остановов транспортного средвтва Дополнительные маркеры размещаются в районе линии трассы-ориентира и служат для указания транспортному средству мест съезда с трассы-ориентира и позиций возможных дополнительных остановов и используются для адресации транспортного средства только в сочетании с ближайшим по ходу движения предшествующим основным маркером трассы-ориентира.
В общем случае при движении транспортного средства из одной дополнительной станции в другую его маршрут состоит из трех участков. Первый участок маршрута это въезд на трассу-ориентир и движение по ней до ближайшего основного маркера трассы-ориентира. При этом вначале транспортное средство движется задним ходом радиально вокруг исходного дополнительного маркера со скоростью причаливания до въезда на линию трассы-ориентира и затем после мгновенной остановки, связанной с необходимостью изменения направления движения, движется с крейсерской скоростью по трассе-ориентиру с выходом на следующий участок маршрута
Второй участок маршрута проходит непосредственно по трассе-ориентиру между основными маркерами, указанными в транспортном задании. По завершении указанного участка маршрута транспортное средство с крейсерской скоростью выезжает на следующий перегон и при обнаружении указанного в транспортном задании дополнительного маркера осуществляет радиальный съезд с трассы-ориентира с одно- временным снижением скорости с крейсерской до скорости причаливания с последующим остановом. В частном случае в маршруте движения транспортного средства может отсутствовать первый или второй участок, или оба участка одновременно.
Транспортное задание определяется тройкой кодов (i, j, I), где - код основного маркера текущего расположения транспортного средства; j - код основного маркера станции назначения; I - код дополнительного маркера станции назначения. Указанные коды определяются, исходя из произвольной нумерации основных маркеров натуральными числами 1, 2 и нумерации
дополнительных маркеров натуральными числами 1, 2,..., отдельно в пределах одного перегона транспортной сети по ходу движения и отдельно, с каждой стороны линии трассы-ориентира.
При выполнении транспортного задания процесс управления транспортным средством осуществляется на двух уровнях. На верхнем уровнеуправления обеспечивается выбор маршрута движения, а именно определяется необходимость въезда на трассу-ориентир, на каждом перегоне определяется наличие движения над экранированным участком, выбор крейсерской скорости движения или скорости причаливания, выбор направления движения со скоростью причаливания передним или задним ходом, идентификация станции назначения, определение необходимости съезда с трассы-ориентира и выработка команды останова.
Признак необходимости реализации въезда на трассу-ориентир является единичное состояние Т-триггера, который взводится каждый раз, когда транспортное средство останавливается у дополнительной станции. В этом случае по сигналу пуска с панели ввода аналоговый мультиплексор передает с блока задающих сигналов через первый усилитель мощности на привод движения сигнал движения со скоростью причаливания задним ходом. Одновременно в зависимости от направления поворота по прошлому маршруту, считываемого из старшего разряда сдвигового регистра, через второй коммутатор и коммутатор к входам дифференциального усилителя подключается информационный выход левого или правого датчика центрирования. Сигналы от датчика центрирования по форме эквивалентны сигналам от датчиков слежения по трассе-ориентиру. Поддерживая нулевую разность указанного датчика центрирования сервопривод рулевого механизма обеспечит радиальное движение транспортного средства вокруг исходного дополнительного маркера. Одновременно с началом движения в датчик пройденного пути по перепаду на выходе первого RS-триггера
обеспечивается запись константы, выражающей длину радиального пути транспортного средства, и далее по сигналу разрешение счета с выхода Т-триггера через второй элемент ИЛИ обеспечивается разрешение счета пройденного радиального пути. При появлении признака завершения радиального пути на выходе датчика пройденного пути осуществляется переброс в нулевое со0 стояние Т-триггера и одновременно через элемент ИЛИ взведение первого RS-триггера. При этом через аналоговый мультиплексор с блока задающих сигналов через первый усилитель мощности на привод дви5 жения подается сигнал нулевой скорости и одновременно через второй усилитель мощности срабатывает привод торможения. Транспортное средство останавливается. При сбросе Т-триггера в нулевое состо0 яние на его инверсном выходе появляется единичный сигнал, поступающий на блок временной задержки. Через время, необходимое для реверса движения, единица появляется на выходе этого блока и сбрасывает
5 в нулевое состояние первый RS-триггер, и транспортное средство начинает двигаться с крейсерской скоростью по трассе-ориентиру,
При движении по трассе-ориентиру
0 процесс управления транспортным средством осуществляется на двух уровнях. На верхнем уровне управления обеспечивается выбор маршрута по основной трассе-ориентиру, а именно на каждом перегоне опреде5 ляется наличие движения над экранированным участком, выбор крейсерской скорости движения или скорости при- чаливания, идентификация станции назначения и выработка команды останова.
0 Выбор маршрута производится на основании считываемых из блока адресной памяти данных, В этот блок на этапе внедрения устройства заносятся управляющие тройки (К, Р, S), значение которых определяется
5 кодами i, j транспортного задания, где К - код первого встречного маркера по кратчайшему маршруту движения к станции назначения; Р - признак наличия экрана на указанном перегоне к первому встречному
0 маркеру; S - признак причаливания. Такие начальные управления легко определяются по графику трассы-триентира вручную заранее на этапе внедрения устройства для всех возможных транспортных заданий и запи5 сываются в ячейки адресной памяти по адресу (конкатенация). При этом используется тот факт, что путь, полностью принадлежащий какому-либо кратчайшему пути, также является кратчайшим, что позволяет не описывать такие пути, а выбирать их из описанных путем, которым они принадлежат.
Старший разряд отводится под признак причаливания S, следующий за ним разряд - под признак наличия экрана Р, а осталь- ные разряды - под код маркера К. Признак причаливания S равен 1 во всех ячейках по адресам И, что означает достижение станции назначения. Остальные разряды по этим адресам могут быть произвольными, например 0.
Адрес считываемых данных изменяется каждый раз при фиксировании маркера первым датчиком маркеров. Старшие разряды адреса считываются из первого регистра - код текущего маркера, а младшие - из второго регистра - код маркера станции назна- чения. Из блока адресной памяти считываются признак наличия экрана Р, код первого встречного маркера К, который пе- реписывается в первый регистр при его достижении транспортным средством, и признак причаливания S, служащий для идентификации станции назначения, При считывании признака причаливания транс- портное средство переходит в режим движения со скоростью причаливания, если отсутствует признак поиска дополнительной станции, и при обнаружении маркера вторым датчиком маркеров включается тор- можение, и транспортное средство останавливается. В случае наличия признака поиска дополнительной станции транспортное средство сохраняет крейсерскую скорость и переходит в режим поиска указанной в транспортном задании дополнительной станции. Для точного позиционирования транспортного средства около каждой основной станции назначения маркер этой станции должен быть установлен на трассе- ориентире с учетом останова транспортного средства по второму датчику маркеров.
При считывании признака наличия экрана происходит переключение датчиков слежения (вместо первых датчиков подклю- чаются вторые). Обратное их переключение происходит при обнаружении маркера вторым датчиком маркеров, что происходит после того, как передние датчики слежения пройдут над экранированным участком. При возникновении сигнала с аварийного датчика (обнаружение препятствия и т.п.) транспортное средство переходит в режим торможения.
На нижнем уровне управления осущест- вляется реализация маршрута движения и выработанных на верхнем уровне команд, а Именно аналоговое управление сервоприводом рулевого механизма и приводами движения ц, торможения. При движении
транспортного средства над экраном отслеживание трассы-ориентира осуществляется вторыми датчиками слежения, во всех остальных случаях - первыми датчиками слежения. Переключение датчиков слежения обеспечивается аналоговым коммутатором. Сигнал, представляющий текущее положение транспортного средства относительно трассы-ориентира, формируется на выходе дифференциального усилителя, как разность сигналов от первых или вторых датчиков слежения, усиливается в третьем усилителе мощности и подается на сервопривод рулевого механизма. Привод движения транспортного средства осуществляет его останов или движение как с крейсерской скоростью, так и со скоростью причаливания, как передним, так и задним ходом. Указанным режимам соответствуют различные сигналы, получаемые параллельно на выходе блока задающих сигналов. Подключение тех или иных сигналов к входу привода движения через первый усилитель мощности обеспечивается аналоговым мультиплексором, управляемым командами Движение- торможение, Крейсерская скорость - скорость причаливания, Движение передним ходом - движение задним ходом, поступающими из блока адресной памяти, первого RS-триггера, Т-триггера и элемента ИЛИ-НЕ. Команда Движение - торможение через второй усилитель мощности подается также на привод торможения, производя останов транспортного средства.
Признаком необходимости реализации съезда с трассы-ориентира является единичное состояние D-триггера, который взводится каждый раз, когда код дополнительной станции назначения, записанный в вычитающем счетчике, не равен нулю. При достижении транспортным средством указанного в транспортном задании основного маркера с блока адресной памяти считывается признак причаливания S, равный единице, по которому вычитающий счетчик из кода дополнительной станции назначения вычитает единицу при каждом появлении признака захвата дополнительного маркера, поступающего на его счетный вход через второй коммутатор с левого или правого датчика центрирования. При появлении единицы на выходе Равенство нулю вычитающего счетчика формируется сигнал, по которому в датчике пройденного пути,, хранящему константу, выражающую длину радиального пути транспортного средства и заносимую в этот датчик по перепаду напряжения на выходе первого RS-триггера, начинается отсчет пройденного радиального
пути. По этому же сигналу в зависимости от признака направления поворота, находящемуся в сдвиговом регистре, через коммутатор и второй коммутатор к дифференциальному усилителю подключается информационный выход левого или правого датчика центрирования. При этом через аналоговый мультиплексор с блока задающих сигналов через первый усилитель мощности на привод движения подается сигнал движения со скоростью причаливания передним ходом. Скорость транспортного средства постепенно с крейсерской снижается до скорости причаливания. При появлении признака завершения радиального пути на выходе датчика пройденного пути осуществляется переброс в единичное состояние Т-триггера и одновременно через элемент ИЛИ взведение первого RS-тригге- ра. При этом через аналоговый мультиплексор с блока задающих сигналов через первый усилитель мощности на привод движения подается сигнал нулевой скорости и одновременно через второй усилитель мощности срабатывает привод торможения. Транспортное средство останавливается.
Аналогичных решений авторам неизвестно.
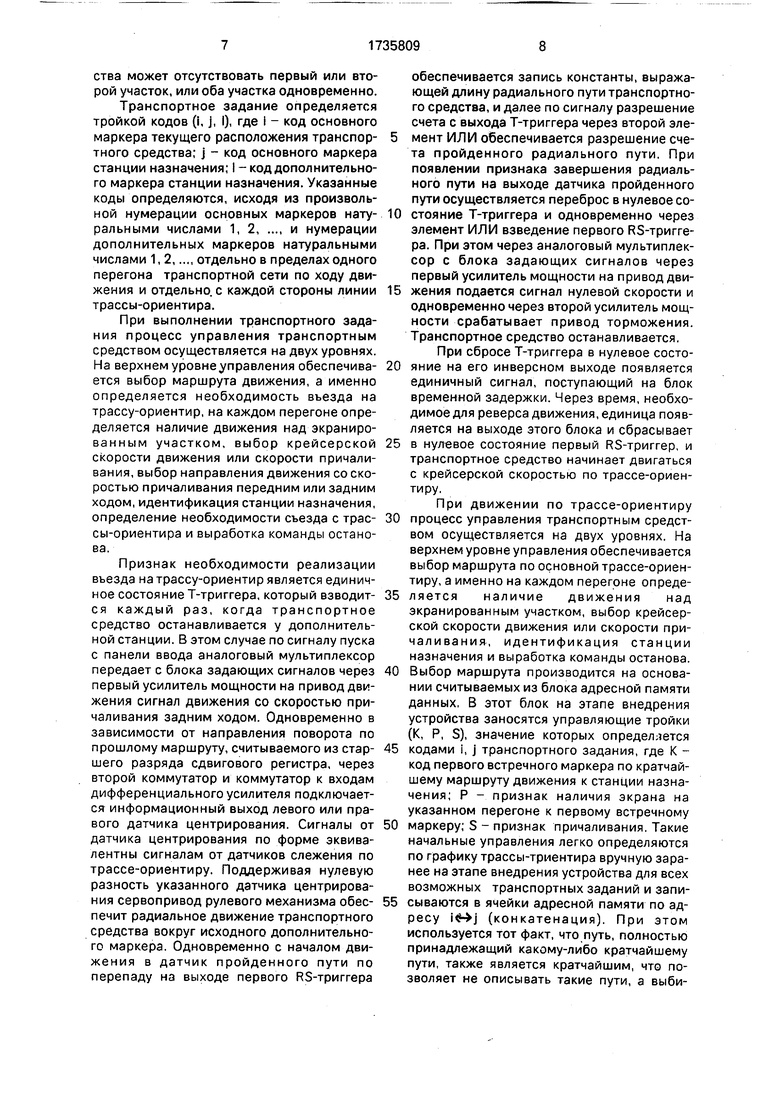
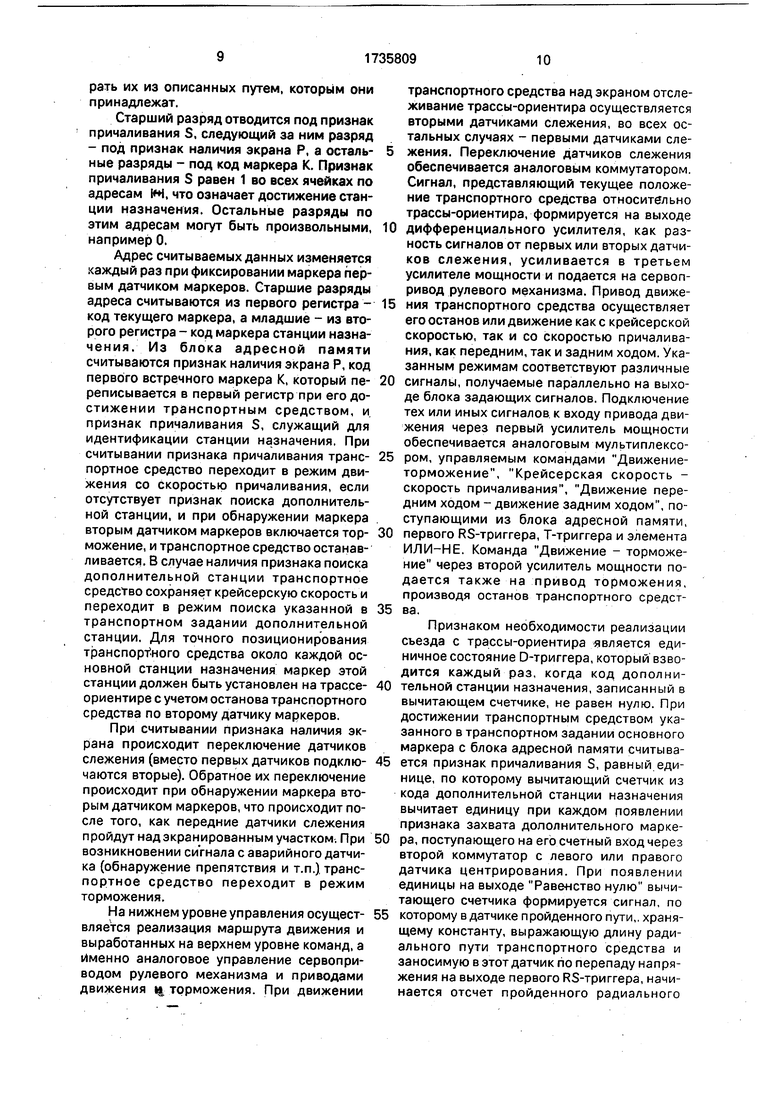
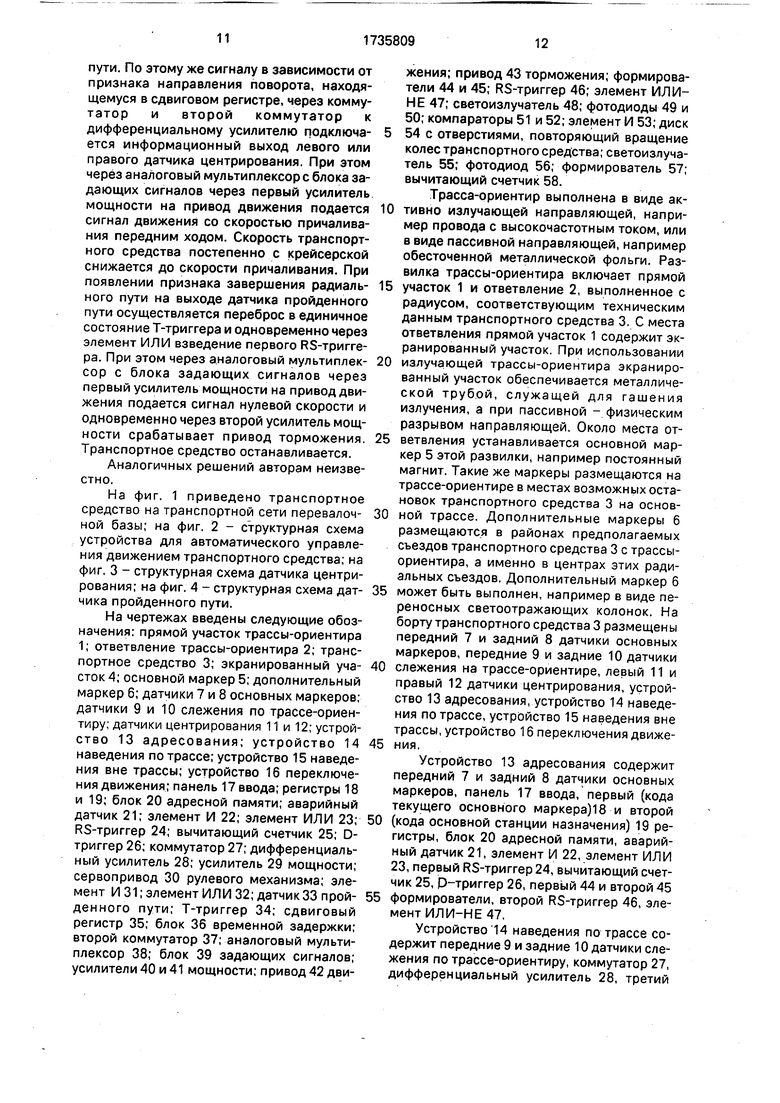
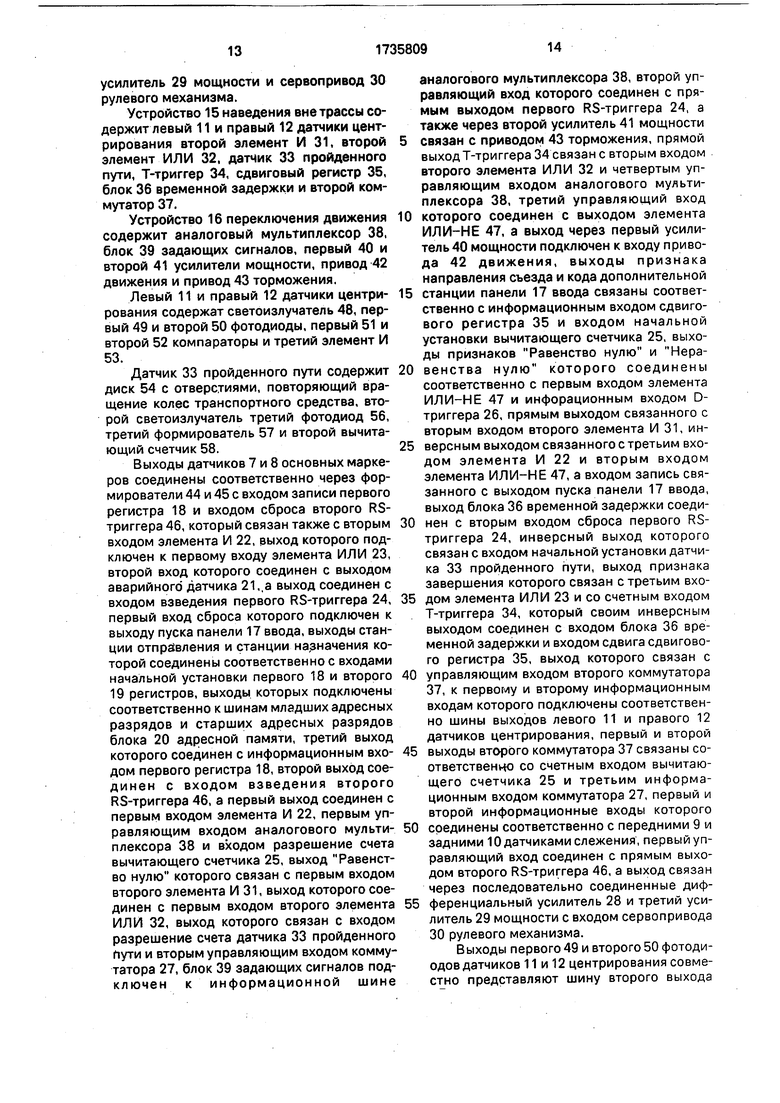
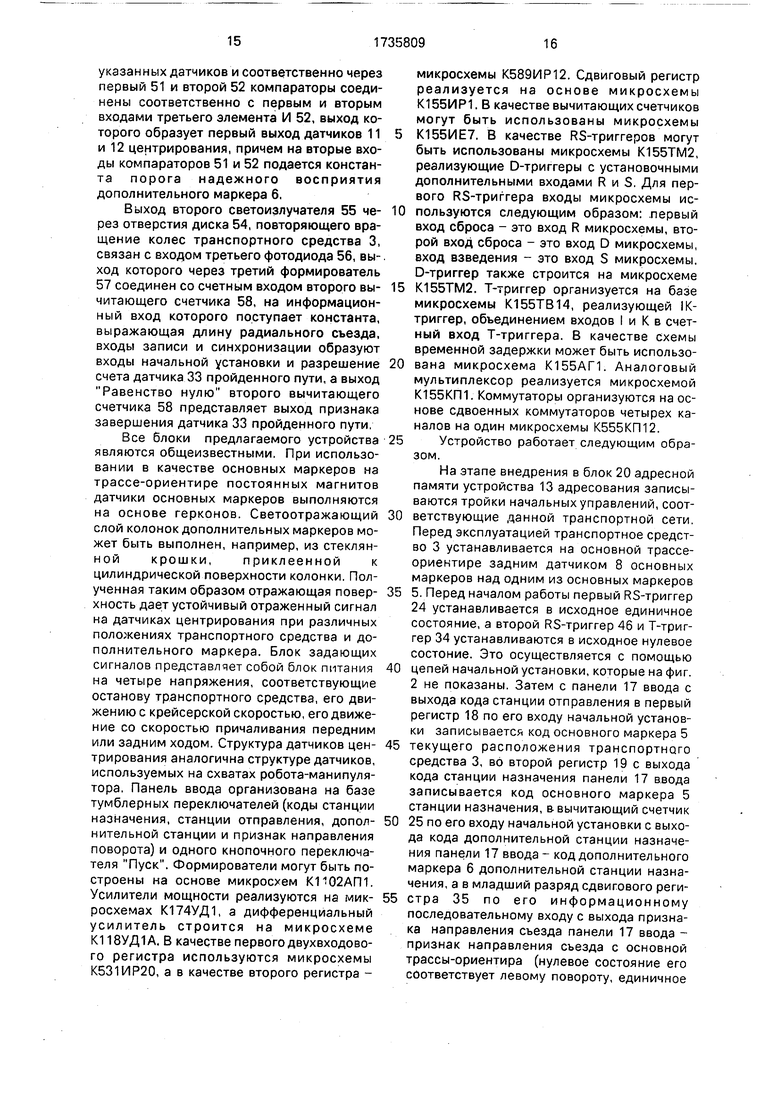
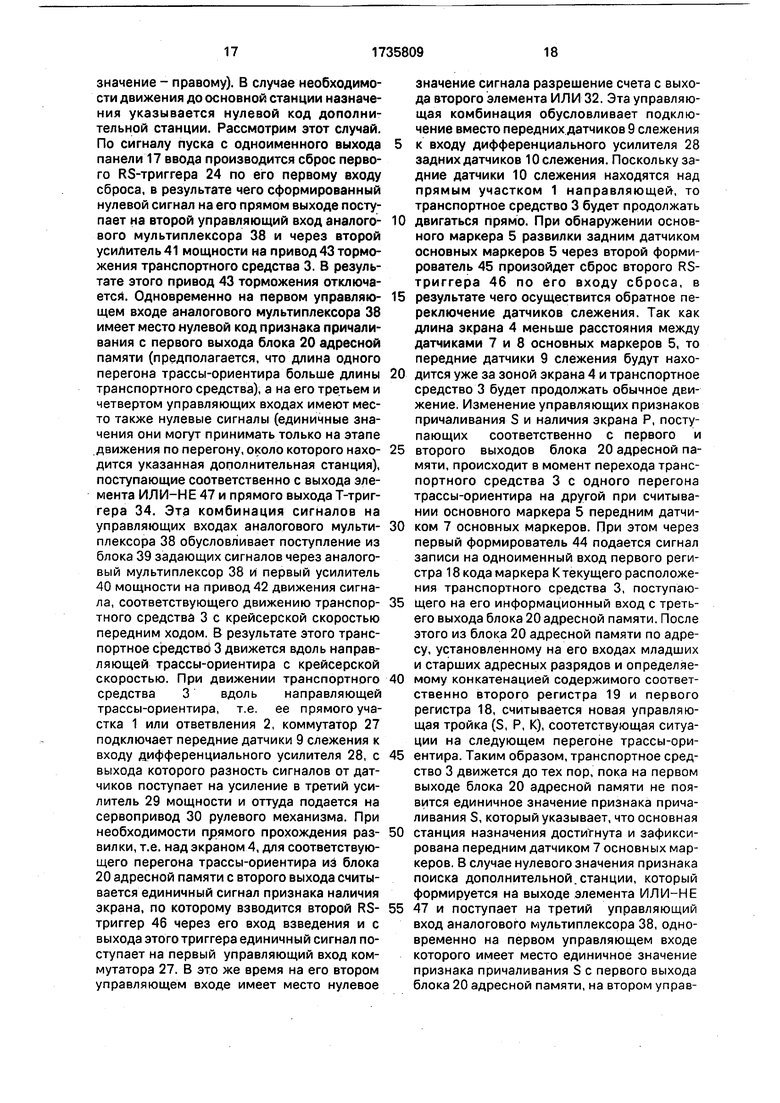
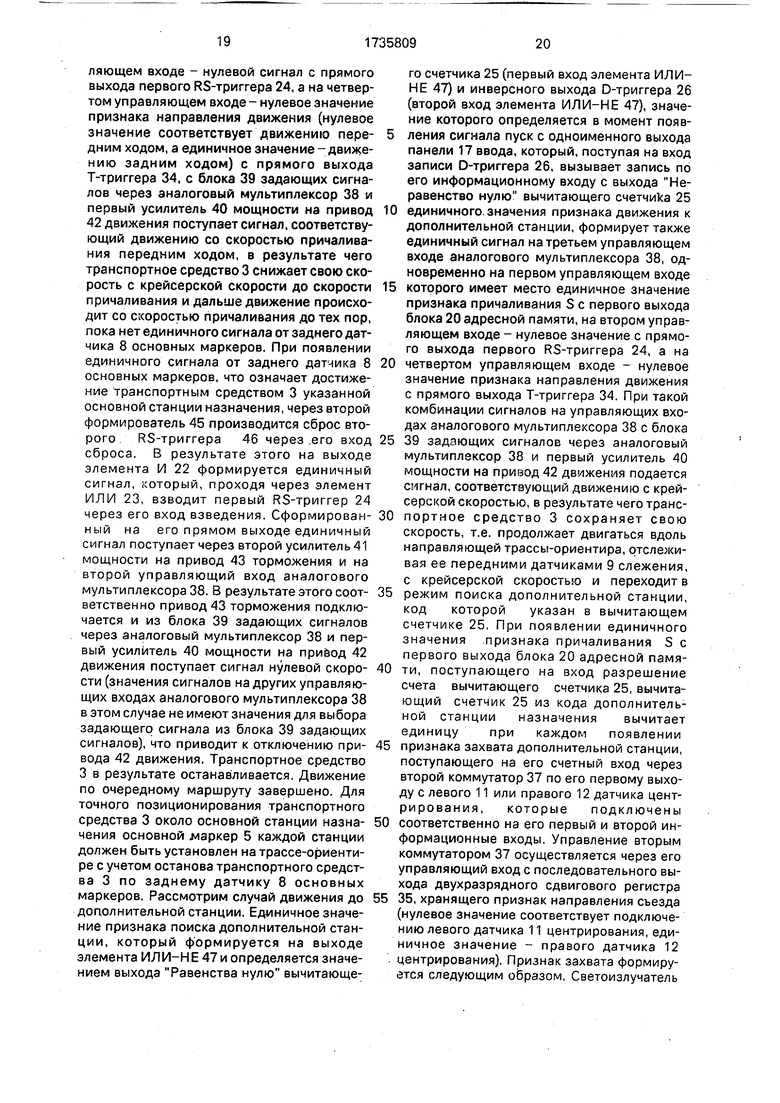
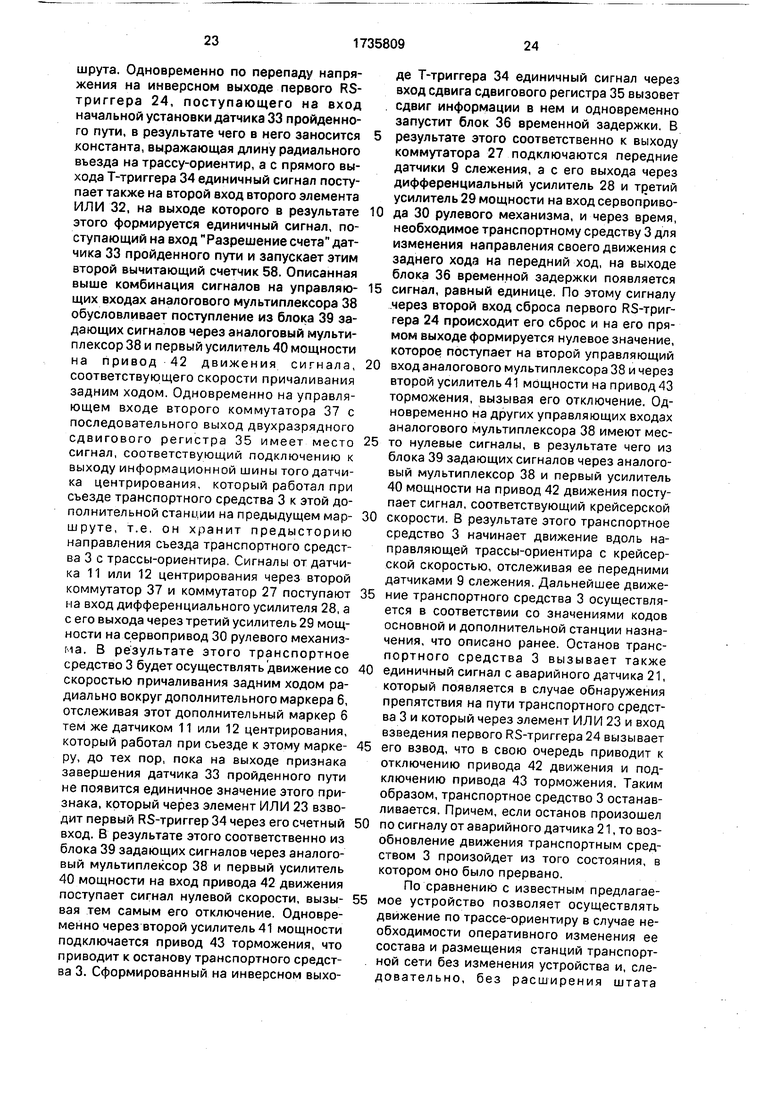
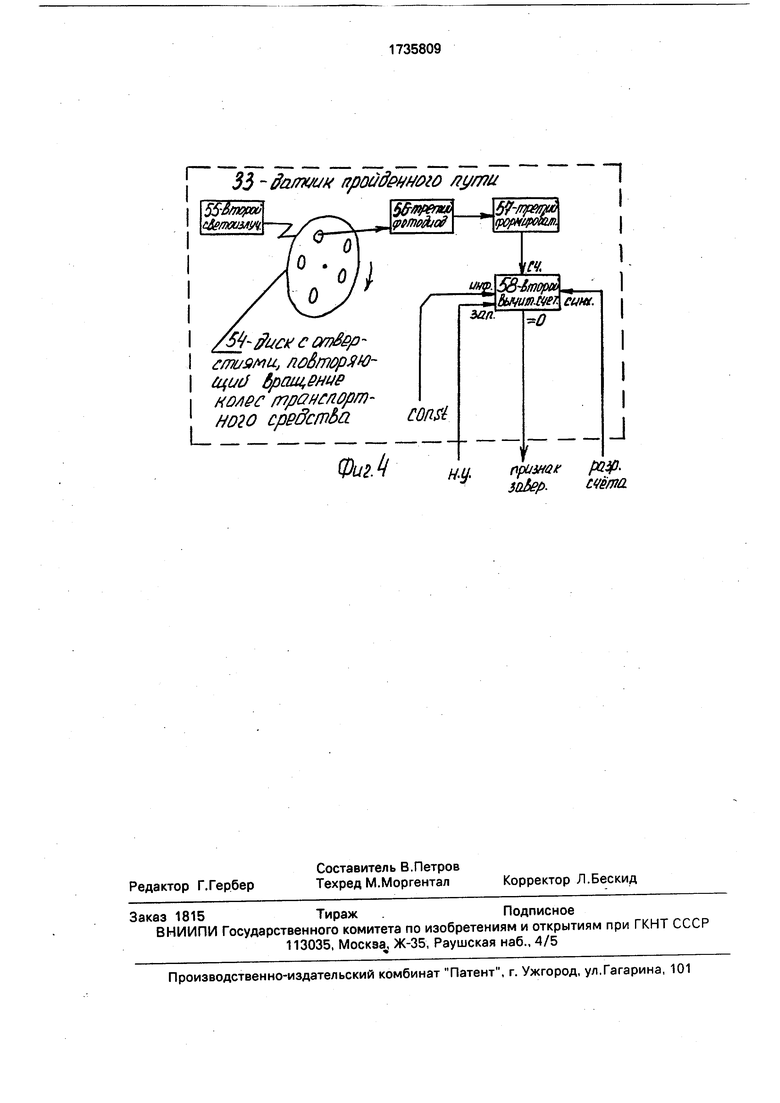
На фиг. 1 приведено транспортное средство на транспортной сети перевалочной базы; на фиг. 2 - структурная схема устройства для автоматического управления движением транспортного средства; на фиг. 3 - структурная схема датчика центрирования; на фиг. 4 - структурная схема датчика пройденного пути.
На чертежах введены следующие обозначения; прямой участок трассы-ориентира 1; ответвление трассы-ориентира 2; транспортное средство 3; экранированный участок 4; основной маркер 5; дополнительный маркер 6; датчики 7 и 8 основных маркеров; датчики 9 и 10 слежения по трассе-ориентиру; датчики центрирования 11 и 12; устройство 13 адресования; устройство 14 наведения по трассе; устройство 15 наведения вне трассы; устройство 16 переключения движения; панель 17 ввода; регистры 18 и 19; блок 20 адресной памяти; аварийный датчик 21; элемент И 22; элемент ИЛИ 23; RS-триггер 24; вычитающий счетчик 25; D- триггер 26; коммутатор 27; дифференциальный усилитель 28; усилитель 29 мощности; сервопривод 30 рулевого механизма; элемент И 31; элемент ИЛИ 32; датчик 33 прой- денного пути; Т-триггер 34; сдвиговый регистр 35; блок 36 временной задержки; второй коммутатор 37; аналоговый мультиплексор 38; блок 39 задающих сигналов; усилители 40 и 41 мощности; привод 42 движения; привод 43 торможения; формирователи 44 и 45; RS-триггер 46; элемент ИЛИ- НЕ 47; светоизлучатель 48; фотодиоды 49 и 50; компараторы 51 и 52; элемент И 53; диск
54 с отверстиями, повторяющий вращение колес транспортного средства; светоизлучатель 55; фотодиод 56; формирователь 57; вычитающий счетчик 58.
Трасса-ориентир выполнена в виде ак0 тивно излучающей направляющей, например провода с высокочастотным током, или в виде пассивной направляющей, например обесточенной металлической фольги. Развилка трассы-ориентира включает прямой
5 участок 1 и ответвление 2, выполненное с радиусом, соответствующим техническим данным транспортного средства 3. С места ответвления прямой участок 1 содержит экранированный участок. При использовании
0 излучающей трассы-ориентира экранированный участок обеспечивается металлической трубой, служащей для гашения излучения, а при пассивной - физическим разрывом направляющей. Около места от5 ветвления устанавливается основной маркер 5 этой развилки, например постоянный магнит. Такие же маркеры размещаются на трассе-ориентире в местах возможных остановок транспортного средства 3 на основ0 ной трассе. Дополнительные маркеры 6 размещаются в районах предполагаемых съездов транспортного средства 3 с трассы- ориентира, а именно в центрах этих радиальных съездов. Дополнительный маркер 6
5 может быть выполнен, например в виде переносных светоотражающих колонок. На борту транспортного средства 3 размещены передний 7 и задний 8 датчики основных маркеров, передние 9 и задние 10 датчики
0 слежения на трассе-ориентире, левый 11 и правый 12 датчики центрирования, устройство 13 адресования,устройство 14 наведения по трассе, устройство 15 наведения вне трассы, устройство 16 переключения движе5 ния.
Устройство 13 адресования содержит передний 7 и задний 8 датчики основных маркеров, панель 17 ввода, первый (кода текущего основного маркера)18 и второй
0 (кода основной станции назначения) 19 регистры, блок 20 адресной памяти, аварийный датчик 21, элемент И 22, элемент ИЛИ 23, первый RS-триггер 24, вычитающий счетчик 25, Р-триггер 26, первый 44 и второй 45
5 формирователи, второй RS-триггер 46, элемент ИЛИ-НЕ 47.
Устройство 14 наведения по трассе содержит передние 9 и задние 10 датчики слежения по трассе-ориентиру, коммутатор 27, дифференциальный усилитель 28, третий
усилитель 29 мощности и сервопривод 30 рулевого механизма.
Устройство 15 наведения вне трассы содержит левый 11 и правый 12 датчики центрирования второй элемент И 31, второй элемент ИЛИ 32, датчик 33 пройденного пути, Т-триггер 34, сдвиговый регистр 35, блок 36 временной задержки и второй коммутатор 37.
Устройство 16 переключения движения содержит аналоговый мультиплексор 38, блок 39 задающих сигналов, первый 40 и второй 41 усилители мощности, привод 42 движения и привод 43 торможения.
Левый 11 и правый 12 датчики центрирования содержат светоизлучатель 48, первый 49 и второй 50 фотодиоды, первый 51 и второй 52 компараторы и третий элемент И 53.
Датчик 33 пройденного пути содержит диск 54 с отверстиями, повторяющий вращение колес транспортного средства, второй светоизлучатель третий фотодиод 56, третий формирователь 57 и второй вычитающий счетчик 58.
Выходы датчиков 7 и 8 основных маркеров соединены соответственно через формирователи 44 и 45 с входом записи первого регистра 18 и входом сброса второго RS- триггера 46, который связан также с вторым входом элемента И 22, выход которого подключен к первому входу элемента ИЛИ 23, второй вход которого соединен с выходом аварийного датчика 21,,а выход соединен с входом взведения первого RS-триггера 24, первый вход сброса которого подключен к выходу пуска панели 17 ввода, выходы станции отправления и станции назначения которой соединены соответственно с входами начальной установки первого 18 и второго 19 регистров, выходы которых подключены соответственно к шинам младших адресных разрядов и старших адресных разрядов блока 20 адресной памяти, третий выход которого соединен с информационным входом первого регистра 18, второй выход соединен с входом взведения второго RS-триггера 46, а первый выход соединен с первым входом элемента И 22, первым управляющим входом аналогового мультиплексора 38 и входом разрешение счета вычитающего счетчика 25, выход Равенство нулю которого связан с первым входом второго элемента И 31, выход которого соединен с первым входом второго элемента ИЛИ 32, выход которого связан с входом разрешение счета датчика 33 пройденного Пути и вторым управляющим входом коммутатора 27, блок 39 задающих сигналов под- ключен к информационной шине
аналогового мультиплексора 38, второй управляющий вход которого соединен с прямым выходом первого RS-триггера 24, а также через второй усилитель 41 мощности
связан с приводом 43 торможения, прямой выход Т-триггера 34 связан с вторым входом второго элемента ИЛИ 32 и четвертым управляющим входом аналогового мультиплексора 38, третий управляющий вход
0 которого соединен с выходом элемента ИЛИ-НЕ 47, а выход через первый усилитель 40 мощности подключен к входу привода 42 движения, выходы признака направления съезда и кода дополнительной
5 станции панели 17 ввода связаны соответственно с информационным входом сдвигового регистра 35 и входом начальной установки вычитающего счетчика 25, выходы признаков Равенство нулю и Нера0 венства нулю которого соединены соответственно с первым входом элемента ИЛИ-НЕ 47 и инфорационным входом D- триггера 26, прямым выходом связанного с вторым входом второго элемента И 31, ин5 версным выходом связанного с третьим входом элемента И 22 и вторым входом элемента ИЛИ-НЕ 47, а входом запись связанного с выходом пуска панели 17 ввода, выход блока 36 временной задержки соеди0 нен с вторым входом сброса первого RS- триггера 24, инверсный выход которого связан с входом начальной установки датчика 33 пройденного пути, выход признака завершения которого связан с третьим вхо5 дом элемента ИЛИ 23 и со счетным входом Т-триггера 34, который своим инверсным выходом соединен с входом блока 36 временной задержки и входом сдвига сдвигового регистра 35, выход которого связан с
0 управляющим входом второго коммутатора 37, к первому и второму информационным входам которого подключены соответственно шины выходов левого 11 и правого 12 датчиков центрирования, первый и второй
5 выходы второго коммутатора 37 связаны соответственно со счетным входом вычитающего счетчика 25 и третьим информационным входом коммутатора 27, первый и второй информационные входы которого
0 соединены соответственно с передними 9 и задними 10 датчиками слежения, первый управляющий вход соединен с прямым выходом второго RS-триггера 46, а выход связан через последовательно соединенные диф5 ференциальный усилитель 28 и третий усилитель 29 мощности с входом сервопривода 30 рулевого механизма.
Выходы первого 49 и второго 50 фотодиодов датчиков 11 и 12 центрирования совместно представляют шину второго выхода
указанных датчиков и соответственно через первый 51 и второй 52 компараторы соединены соответственно с первым и вторым входами третьего элемента И 52, выход которого образует первый выход датчиков 11 и 12 центрирования, причем на вторые входы компараторов 51 и 52 подается константа порога надежного восприятия дополнительного маркера 6,
Выход второго светоизлучателя 55 через отверстия диска 54, повторяющего вращение колес транспортного средства 3, связан с входом третьего фотодиода 56, вы-. ход которого через третий формирователь 57 соединен со счетным входом второго вычитающего счетчика 58, на информационный вход которого поступает константа, выражающая длину радиального съезда, входы записи и синхронизации образуют входы начальной установки и разрешение счета датчика 33 пройденного пути, а выход Равенство нулю второго вычитающего счетчика 58 представляет выход признака завершения датчика 33 пройденного пути,
Все блоки предлагаемого устройства являются общеизвестными. При использовании в качестве основных маркеров на трассе-ориентире постоянных магнитов датчики основных маркеров выполняются на основе герконов. Светоотражающий слой колонок дополнительных маркеров может быть выполнен, например, из стеклянной крошки, приклеенной к цилиндрической поверхности колонки. Полученная таким образом отражающая поверхность дает устойчивый отраженный сигнал на датчиках центрирования при различных положениях транспортного средства и дополнительного маркера. Блок задающих сигналов представляет собой блок питания на четыре напряжения, соответствующие останову транспортного средства, его движению с крейсерской скоростью, его движение со скоростью причаливания передним или задним ходом. Структура датчиков центрирования аналогична структуре датчиков, используемых на схватах робота-манипулятора. Панель ввода организована на базе тумблерных переключателей (коды станции назначения, станции отправления, дополнительной станции и признак направления поворота) и одного кнопочного переключателя Пуск. Формирователи могут быть построены на основе микросхем К1102АП1. Усилители мощности реализуются на микросхемах К174УД1, а дифференциальный усилитель строится на микросхеме К118УД1А. В качестве первого двухвходово- го регистра используются микросхемы К531ИР20, а в качестве второго регистра микросхемы К589ИР12. Сдвиговый регистр реализуется на основе микросхемы К155ИР1. В качестве вычитающих счетчиков могут быть использованы микросхемы
К155ИЕ7. В качестве RS-триггеров могут быть использованы микросхемы К155ТМ2, реализующие D-триггеры с установочными дополнительными входами R и S. Для первого RS-триггера входы микросхемы ис0 пользуются следующим образом: .первый вход сброса - это вход R микросхемы, второй вход сброса - это вход D микросхемы, вход взведения - это вход S микросхемы. D-триггер также строится на микросхеме
5 К155ТМ2. Т-триггер организуется на базе микросхемы К155ТВ14, реализующей IK- триггер, объединением входов I и К в счетный вход Т-триггера. В качестве схемы временной задержки может быть использо0 вана микросхема К155АГ1. Аналоговый мультиплексор реализуется микросхемой К155КП1. Коммутаторы организуются на основе сдвоенных коммутаторов четырех каналов на один микросхемы К555КП12.
5Устройство работает следующим образом.
На этапе внедрения в блок 20 адресной памяти устройства 13 адресования записываются тройки начальных управлений, соот0 ветствующие данной транспортной сети. Перед эксплуатацией транспортное средство 3 устанавливается на основной трассе- ориентире задним датчиком 8 основных маркеров над одним из основных маркеров
5 5. Перед началом работы первый RS-триггер 24 устанавливается в исходное единичное состояние, а второй RS-триггер 46 и Т-триггер 34 устанавливаются в исходное нулевое состоние. Это осуществляется с помощью
0 цепей начальной установки, которые на фиг. 2 не показаны. Затем с панели 17 ввода с выхода кода станции отправления в первый регистр 18 по его входу начальной установки записывается код основного маркера 5
5 текущего расположения транспортного средства 3, во второй регистр 19 с выхода кода станции назначения панели 17 ввода записывается код основного маркера 5 станции назначения, & вычитающий счетчик
0 25 по его входу начальной установки с выхода кода дополнительной станции назначения панели 17 ввода- код дополнительного маркера 6 дополнительной станции назначения, а в младший разряд сдвигового реги5 стра 35 по его информационному последовательному входу с выхода признака направления съезда панели 17 ввода - признак направления съезда с основной трассы-ориентира (нулевое состояние его соответствует левому повороту, единичное
значение - правому). В случае необходимости движения до основной станции назначения указывается нулевой код дополнительной станции. Рассмотрим этот случай. По сигналу пуска с одноименного выхода панели 17 ввода производится сброс первого RS-триггера 24 по его первому входу сброса, в результате чего сформированный нулевой сигнал на его прямом выходе поступает на второй управляющий вход аналоге- вого мультиплексора 38 и через второй усилитель 41 мощности на привод 43 торможения транспортного средства 3. В результате этого привод 43 торможения отключается. Одновременно на первом управляю- щем входе аналогового мультиплексора 38 имеет место нулевой код признака причаливания с первого выхода блока 20 адресной памяти (предполагается, что длина одного перегона трассы-ориентира больше длины транспортного средства), а на его третьем и четвертом управляющих входах имеют место также нулевые сигналы (единичные значения они могут принимать только на этапе движения по перегону, около которого нахо- дится указанная дополнительная станция), поступающие соответственно с выхода элемента ИЛИ-НЕ 47 и прямого выхода Т-триг- гера 34. Эта комбинация сигналов на управляющих входах аналогового мульти- плексора 38 обусловливает поступление из блока 39 задающих сигналов через аналоговый мультиплексор 38 и первый усилитель 40 мощности на привод 42 движения сигнала, соответствующего движению транспор- тного средства 3 с крейсерской скоростью передним ходом. В результате этого транспортное средство 3 движется вдоль направляющей трассы-ориентира с крейсерской скоростью. При движении транспортного средства 3 вдоль направляющей трассы-ориентира, т.е. ее прямого участка 1 или ответвления 2, коммутатор 27 подключает передние датчики 9 слежения к входу дифференциального усилителя 28, с выхода которого разность сигналов от датчиков поступает на усиление в третий усилитель 29 мощности и оттуда подается на сервопривод 30 рулевого механизма. При необходимости прямого прохождения раз- вилки, т.е. над экраном 4, для соответствующего перегона трассы-ориентира из блока 20 адресной памяти с второго выхода считывается единичный сигнал признака наличия экрана, по которому взводится второй RS- триггер 46 через его вход взведения и с выхода этого триггера единичный сигнал поступает на первый управляющий вход коммутатора 27. В это же время на его втором управляющем входе имеет место нулевое
значение сигнала разрешение счета с выхода второго элемента ИЛИ 32. Эта управляющая комбинация обусловливает подключение вместо передних датчиков 9 слежения к входу дифференциального усилителя 28 задних датчиков 10 слежения. Поскольку задние датчики 10 слежения находятся над прямым участком 1 направляющей, то транспортное средство 3 будет продолжать двигаться прямо. При обнаружении основного маркера 5 развилки задним датчиком основных маркеров 5 через второй формирователь 45 произойдет сброс второго RS- триггера 46 по его входу сброса, в результате чего осуществится обратное переключение датчиков слежения. Так как длина экрана 4 меньше расстояния между датчиками 7 и 8 основных маркеров 5, то передние датчики 9 слежения будут находится уже за зоной экрана 4 и транспортное средство 3 будет продолжать обычное движение. Изменение управляющих признаков причаливания S и наличия экрана Р, поступающих соответственно с первого и второго выходов блока 20 адресной памяти, происходит в момент перехода транспортного средства 3 с одного перегона трассы-ориентира на другой при считывании основного маркера 5 передним датчиком 7 основных маркеров. При этом через первый формирователь 44 подается сигнал записи на одноименный вход первого регистра 18 кода маркера К текущего расположения транспортного средства 3, поступающего на его информационный вход с третьего выхода блока 20 адресной памяти. После этого из блока 20 адресной памяти по адресу, установленному на его входах младших и старших адресных разрядов и определяемому конкатенацией содержимого соответственно второго регистра 19 и первого регистра 18, считывается новая управляющая тройка (S, P, К), соотетствующая ситуации на следующем перегоне трассы-ориентира. Таким образом, транспортное средство 3 движется до тех пор, пока на первом выходе блока 20 адресной памяти не появится единичное значение признака причаливания S, который указывает, что основная станция назначения достигнута и зафиксирована передним датчиком 7 основных маркеров, В случае нулевого значения признака поиска дополнительной.станции, который формируется на выходе элемента ИЛИ-НЕ 47 и поступает на третий управляющий вход аналогового мультиплексора 38, одновременно на первом управляющем входе которого имеет место единичное значение признака причаливания S с первого выхода блока 20 адресной памяти, на втором управляющем входе - нулевой сигнал с прямого выхода первого RS-триггера 24, а на четвертом управляющем входе - нулевое значение признака направления движения (нулевое значение соответствует движению пере- дним ходом, а единичное значение -движению задним ходом) с прямого выхода Т-триггера 34, с блока 39 задающих сигналов через аналоговый мультиплексор 38 и первый усилитель 40 мощности на привод 42 движения поступает сигнал, соответствующий движению со скоростью причаливания передним ходом, в результате чего транспортное средство 3 снижает свою скорость с крейсерской скорости до скорости причаливания и дальше движение происходит со скоростью причаливания до тех пор, пока нет единичного сигнала от заднего датчика 8 основных маркеров. При появлении единичного сигнала от заднего датчика 8 основных маркеров, что означает достижение транспортным средством 3 указанной основной станции назначения, через второй формирователь 45 производится сброс второго RS-триггера 46 через его вход сброса. В результате этого на выходе элемента И 22 формируется единичный сигнал, который, проходя через элемент ИЛИ 23, взводит первый RS-триггер 24 через его вход взведения. Сформирован- ный на его прямом выходе единичный сигнал поступает через второй усилитель 41 мощности на привод 43 торможения и на второй управляющий вход аналогового мультиплексора 38. В результате этого соот- ветственно привод 43 торможения подключается и из блока 39 задающих сигналов через аналоговый мультиплексор 38 и первый усилитель 40 мощности на привод 42 движения поступает сигнал нулевой скоро- сти (значения сигналов на других управляющих входах аналогового мультиплексора 38 в этом случае не имеют значения для выбора задающего сигнала из блока 39 задающих сигналов), что приводит к отключению при- вода 42 движения. Транспортное средство 3 в результате останавливается. Движение по очередному маршруту завершено. Для точного позиционирования транспортного средства 3 около основной станции назна- чения основной маркер 5 каждой станции должен быть установлен на трассе-ориентире с учетом останова транспортного средства 3 по заднему датчику 8 основных маркеров. Рассмотрим случай движения до дополнительной станции. Единичное значение признака поиска дополнительной станции, который формируется на выходе элемента ИЛ И-НЕ 47 и определяется значением выхода Равенства нулю вычитающего счетчика 25 (первый вход элемента ИЛИ- НЕ 47) и инверсного выхода D-триггера 26 (второй вход элемента ИЛИ-НЕ 47), значение которого определяется в момент появления сигнала пуск с одноименного выхода панели 17 ввода, который, поступая на вход записи D-триггера 26, вызывает запись по его информационному входу с выхода Неравенство нулю вычитающего C46T4nka 25 единичного значения признака движения к дополнительной станции, формирует также единичный сигнал на третьем управляющем входе аналогового мультиплексора 38, одновременно на первом управляющем входе которого имеет место единичное значение признака причаливания S с первого выхода блока 20 адресной памяти, на втором управляющем входе - нулевое значение с прямого выхода первого RS-триггера 24, а на четвертом управляющем входе - нулевое значение признака направления движения с прямого выхода Т-триггера 34. При такой комбинации сигналов на управляющих входах аналогового мультиплексора 38 с блока 39 задающих сигналов через аналоговый мультиплексор 38 и первый усилитель 40 мощности на привод 42 движения подается смгнал, соответствующий движению с крейсерской скоростью, в результате чего транспортное средство 3 сохраняет свою скорость, т.е. продолжает двигаться вдоль направляющей трассы-ориентира, отслеживая ее передними датчиками 9 слежения, с крейсерской скоростью и переходит в режим поиска дополнительной станции, код которой указан в вычитающем счетчике 25, При появлении единичного значения признака причаливания S с первого выхода блока 20 адресной памяти, поступающего на зход разрешение счета вычитающего счетчика 25, вычитающий счетчик 25 из кода дополнительной станции назначения вычитает единицу при каждом появлении признака захвата дополнительной станции, поступающего на его счетный вход через второй коммутатор 37 по его первому выходу с левого 11 или правого 12 датчика центрирования, которые подключены соответственно на его первый и второй информационные входы. Управление вторым коммутатором 37 осуществляется через его управляющий вход с последовательного выхода двухразрядного сдвигового регистра 35, хранящего признак направления съезда (нулевое значение соответствует подключению левого датчика 11 центрирования, единичное значение - правого датчика 12 центрирования). Признак захвата формируется следующим образом. Светоизлучатель
48 излучает световой сигнал, который отражается дополнительным маркером 6, и этот отраженный сигнал воспринимается первым 49 и вторым 50 фотодиодами. На их выходе появляются сигналы, амплитуда ко- торых пропорциональна отклонению транспортного средства 3 от центра съезда. Эти сигналы передаются по выходной шине датчика 11 или 12 центрирования соответственно на информационные входы первого 51 и второго 52 компараторов. На их вход порога в качестве порогового напряжения подается константа, определяющая состояние надежного захвата дополнительного маркера 6 датчиком 11 или 12 центрирования. При одновременном воспитании первым 49 и вторым 50 фотодиодами дополнительного маркера б на выходах первого 51 и второго 52 компараторов возникают единичные сигналы, порождающие единичный сигнал на выходе третьего элемента И 53, который и является признаком захвата. Появление единичного сигнала на выходе Равенство нулю вычитающего счетчика 25 означает, что транспортное средство 3 достигло указанной дополнительной станции и далее необходимо двигаться радиально вокруг дополнительного маркера 6, который устанавливается в центре этого радиального съезда. Единичные сигналы с выхода Равенство нулю вычитающего счетчика 25 (первый вход второго элемента И 31) и прямого выхода D-триггера 26 (второй вход второго элемента И 31) через второй элемент И 31 на выходе второго элемента ИЛ И 32 дают единичное значение сигнала, поступающего на вход разрешение счета датчика 33 пройденного пути, в который по сигналу движения с инверсного выхода первого RS- триггера 24 через его вход начальной установки, соединенного с входом записи второго вычитающего счетчика 58, на информационный вход которого поступает константа, выражающая длину пути ради- ального съезда с трассы-ориентира, записывается эта константа. Диск 54 с отверстиями (фиг. 4), повторяющий вращение колес транспортного средства 3, пропускается световой сигнал от второго светоизлучателя 55 на вход третьего фотодиода 56, сигнал с выхода которого через третий формирователь 57 поступает на счетный вход второго вычитающего счетчика 58. Второй вычитающий счетчик 58 производит подсчет отвер- сти й до тех пор, пока на его входе синхронизации находится единичное значение сигнала разрешение счета, поступающего с выхода второго элемента ИЛИ 32, и равный единице, когда транспортное средство 3 осуществляет движение по радиальному пути вокруг дополнительного маркера 6. При появлении единичного сигнала на выходе Равенство нулю второго вычитающего счетчика 58, соответствующего выходу признака завершения датчика 33 пройденного пути, через элемент ИЛИ 23 он посту- пает на вход взведения первого RS-триггера 24, что приводит к формированию единичного сигнала на его прямом выходе, который поступает через второй усилитель 41 мощности на привод 43 торможения и на второй управляющий вход аналогового мультиплексора 38. В результате этого соответственно привод 43 торможения подключается и из блока 39 задающих сигналов через аналоговый мультиплексор 38 и первый усилитель 40 мощности на вход привода 42 движения поступает сигнал нулевой скорости, в результате чего транспортное средство 3 останавливается. Одновременно единичный сигнал признака завершения с одноименного выхода 33 пройденного пути поступает на счетный вход Т-триггера 34, в результате чего на его прямом выходе формируется единичный сигнал, означающий, что транспортное средство 3 находится у дополнительного маркера 6. Движение по очередному маршруту завершено. Следующий маршрут будет начинаться от дополнительной станции. Рассмотрим этот случай. При вводе транспортного задания с панели 17 ввода в случае нахождения транспортного средства 3 у дополнительного маркера 6 в качестве станции отправления указывается код основного маркера 5, представляющего собой начало перегона по ходу движения передним ходом, на котором находится этот дополнительный маркер 5. По сигналу пуска с одноименного выхода панели 17 ввода производится сброс первого RS-триггера 24 по его первому входу сброса, в результате чего сформированный нулевой сигнал на его прямом выходе поступает на второй управляющий вход аналогового мультиплексора 38 и через второй усилитель 41 мощности на привод 43 торможения. В результате этого привод торможения отключается. Одновременно на первом управляющем входе аналогового мультиплексора 38 имеет место нулевой код признака причаливания с первого выхода блока 20 адресной памяти, на его третьем управляющем входе имеет место нулевое значение признака поиска дополнительной станции с выхода элемента ИЛИ-НЕ 47, а на четвертом управляющем входе - единичное значение с прямого выхода Т-триггера 34, установленное при завершении предыдущего маршрута. Одновременно по перепаду напряжения на инверсном выходе первого RS- триггера 24, поступающего на вход начальной установки датчика 33 пройденного пути, в результате чего в него заносится константа, выражающая длину радиального въезда на трассу-ориентир, а с прямого выхода Т-триггера 34 единичный сигнал поступает также на второй вход второго элемента ИЛИ 32, на выходе которого в результате этого формируется единичный сигнал, поступающий на вход Разрешение счета датчика 33 пройденного пути и запускает этим второй вычитающий счетчик 58. Описанная выше комбинация сигналов на управляющих входах аналогового мультиплексора 38 обусловливает поступление из блока 39 задающих сигналов через аналоговый мультиплексор 38 и первый усилитель 40 мощности на привод 42 движения сигнала, соответствующего скорости причаливания задним ходом. Одновременно на управляющем входе второго коммутатора 37 с последовательного выход двухразрядного сдвигового регистра 35 имеет место сигнал, соответствующий подключению к выходу информационной шины того датчика центрирования, который работал при съезде транспортного средства 3 к этой дополнительной станции на предыдущем мар- шруте, т.е. он хранит предысторию направления съезда транспортного средства 3 с трассы-ориентира. Сигналы отдатчика 11 или 12 центрирования через второй коммутатор 37 и коммутатор 27 поступают на вход дифференциального усилителя 28, а с его выхода через третий усилитель 29 мощности на сервопривод 30 рулевого механизма. В результате этого транспортное средство 3 будет осуществлять движение со скоростью причаливания задним ходом ра- диально вокруг дополнительного маркера 6, отслеживая этот дополнительный маркер 6 тем же датчиком 11 или 12 центрирования, который работал при съезде к этому маркеру, до тех пор, пока на выходе признака завершения датчика 33 пройденного пути не появится единичное значение этого признака, который через элемент ИЛИ 23 взводит первый RS-триггер 34 через его счетный вход. В результате этого соответственно из блока 39 задающих сигналов через аналоговый мультиплексор 38 и первый усилитель 40 мощности на вход привода 42 движения поступает сигнал нулевой скорости, вызывая тем самым его отключение. Одновременно через второй усилитель 41 мощности подключается привод 43 торможения, что приводит к останову транспортного средства 3. Сформированный на инверсном выходе Т-триггера 34 единичный сигнал через вход сдвига сдвигового регистра 35 вызовет сдвиг информации в нем и одновременно запустит блок 36 временной задержки. В 5 результате этого соответственно к выходу коммутатора 27 подключаются передние датчики 9 слежения, а с его выхода через дифференциальный усилитель 28 и третий усилитель 29 мощности на вход сервоприво0 да 30 рулевого механизма, и через время, необходимое транспортному средству 3 для изменения направления своего движения с заднего хода на передний ход, на выходе блока 36 временной задержки появляется
5 сигнал, равный единице. По этому сигналу .через второй вход сброса первого RS-триг- гера 24 происходит его сброс и на его прямом выходе формируется нулевое значение, которое поступает на второй управляющий
0 вход аналогового мультиплексора 38 и через второй усилитель 41 мощности на привод 43 торможения, вызывая его отключение. Одновременно на других управляющих входах аналогового мультиплексора 38 имеют мес5 то нулевые сигналы, в результате чего из блока 39 задающих сигналов через аналоговый мультиплексор 38 и первый усилитель 40 мощности на привод 42 движения поступает сигнал, соответствующий крейсерской
0 скорости. В результате этого транспортное средство 3 начинает движение вдоль направляющей трассы-ориентира с крейсерской скоростью, отслеживая ее передними датчиками 9 слежения. Дальнейшее движе5 ние транспортного средства 3 осуществляется в соответствии со значениями кодов основной и дополнительной станции назначения, что описано ранее. Останов транспортного средства 3 вызывает также
0 единичный сигнал с аварийного датчика 21, который появляется в случае обнаружения препятствия на пути транспортного средства 3 и который через элемент ИЛИ 23 и вход взведения первого RS-триггера 24 вызывает
5 его взвод, что в свою очередь приводит к отключению привода 42 движения и подключению привода 43 торможения. Таким образом, транспортное средство 3 останавливается. Причем, если останов произошел
0 по сигналу от аварийного датчика 21, то возобновление движения транспортным средством 3 произойдет из того состояния, в котором оно было прервано.
По сравнению с известным предлагае5 мое устройство позволяет осуществлять движение по трассе-ориентиру в случае необходимости оперативного изменения ее состава и размещения станций транспортной сети без изменения устройства и, сле- довательно, без расширения штата
обслуживающего персонала, чего не обеспечивает известное устройство. Это расширяет область применения предлагаемого устройства. Например, изобретение можно использовать на перевалочно-складских базах, где невозможно заранее зафиксировать позиции возможных остановок транспортного средства из-за невозможности точного позиционирования и многообразия форматов внешнего транспорта, например железнодорожный состав. Другим примером использования изобретения может быть гибкая производственная система мелкосерийного и единичного производства с частой сменой состава и размещения оборудования, а следовательно, и позиций остановок автоматизированного транспорта.
Формула изобретения Устройство для управления движением транспортного средства по авт. св. № 1317401, отличающееся тем, что, с целью расширения области применения устройства за счет обеспечения адаптивности к изменениям транспортной сети, оно содержит дополнительные переносные маркеры около трассы-ориентира, устанавливаемые в центрах радиальных съездов транспортного средства к дополнительным станциям транспортной сети, а на борту транспортного средства - размещаемые в его средней части на боковых поверхностях левый и правый датчики центрирования, D- триггер, датчик пройденного пути, вторые элементы И и ИЛИ, Т-триггер, сдвиговый регистр, блок временной задержки, второй коммутатор, элемент И/IVI-HE и вычитающий счетчик, причем первый выход блока адресной памяти связан со входом разрешения счета вычитающего счетчика, выход Равенство нулю которого соединен с первым входом второго элемента И, подключенного выходом к первому входу второго элемента ИЛИ, выход которого связан с входом разрешения счета датчика пройденного
пути и вторым управляющим входом первого коммутатора, выходы признака направления съезда и кода дополнительной станции панели ввода соединены соответственно с информационным входом сдвигового регистра и входом начальной установки вычитающего счетчика, выходы признаков равенства и неравенства нулю которого соединены соответственно с первым входом элемента ИЛИ-НЕ и информационным входом D-триггера, прямым выходом связанного с вторым входом второго элемента И, а инверсным выходом - с третьим входом первого элемента И и вторым входом элемента ИЛИ-НЕ, выход которого соединен с
третьим управляющим входом аналогового мультиплексора, подключенного четвертым управляющим входом к прямому выходу Т- триггера и второму входу второго элемента ИЛИ, выход блока временной задержки соединен с вторым входом сброса первого RS- триггера, инверсный выход которого связан с входом начальной установки датчика пройденного пути, выход признака завершения которого соединен с третьим входом
элемента ИЛИ и со счетным входом Т-триг- гера, подключенного инверсным выходом к входу блока временной задержки и входу сдвига сдвигового регистра, выход которого связан с управляющим входом второго коммутатора, к информационным входам которого подключены выходы соответственно левого и правого датчиков центрирования, первый выход второго коммутатора подключен к счетному входу вычитающего счетчика,
а второй выход - к третьему информационному входу первого коммутатора.
Јгпф
Х
UHOS виьодис/


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство управления движением транспортного средства | 1990 |
|
SU1837328A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| Устройство для выбора кратчайшего маршрута | 1985 |
|
SU1295412A1 |

Изобретение относится к автоматическому управлению, в частности к системам управления транспортными средствами типа робокаров, передвигающихся по разветвленным трассам-ориентирам. Целью изобретения является расширение области применения устройства. Для этого в известное устройство введены дополнительные переносные шарниры около трассы-ориен
0/werfQWfte/O-X
Q trT7Jfl CfcbT7g
ядшйрдс/э -uwoc/ufд/охпд ън - (tf-J)
u/jv/ ефащ
N
(xcodujQ) ddjdvi W0-3
nvntjQMIUqO
aaqo&idi
I
+ «4
//I
s
a
УХЖ Htnchi
fW&tfQGfrttfu/ftfft ft fty 1
/
/
tftlH
-att -tt/x
OHO$
/ / V / t , t h $ ,
6СШШ
33 -tfs/Twx npoufowMO дути
I
| Јциё бр(щенир ноле с трсмспо, ною cppffcmba
п
I
flpUiHQ
заЬер.
мета.
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
