1
Изобретение касается автоматики и может применяться, например, в устройствах управпения точной остановкой полосы проката, рабочих органов станков, прокатных станов и т.д.
Известны следящие системы в устройствах точной автоматической остановки
:ii.t2.
Известна следящая система, содержащая -задатчик скорости, датчик скорости, выход которого соединен с первым входом регулятора скорости, ко второму входу которого подключен выход задатчика интенивности, выход регулятора скорости.подключен к дв1П ателю, вал которого механически соединен с датчиком скорости и через объект управления с рабочи т органом 2 .
Недостатком известной системы является низкая точность.
Цель .изобретения - повысить точность системдз.
&ГО достигается тем, что в исшпстиую ледящую систек у дополи;1топьч() пвопоиы
релейный элемент, компаратор, элемент И н нуль-орган, вход которого соединен с первым входом компаратора и с выходом датчика скорости, первый выход аадатчикл скорости соединен с первыми входами репойного элемента и элемента И, выход которого подсоединен ко второму входу репейного элемента, а выходы нуль -органа, кок)паратора, релейного элемента и второй вы- ход задатчика скорости подключены соответственно ко BTOpONfy входу элемента И, к третьему входу релейного эле тента, к входу задагчика интенсивности и ко втоpONfy входу компаратора. Задатчик скорости содержит ключевые элементы, резисторы, источник питания и дискретные датчики положения, первый из которых соединен с первы выход ом зада тчика скор ости,каждый дискрогныйдатчик попожения, начиная со второго, чорезсоогветсгвующие Г1оспедоватегть1 о соединенные ключевой элемент и резистор подключен к первому входу пыхолно1Орезнстаря и ко второму выходу зпдатчика скорости, а второй вывод выходного резистора и один но В1,1вадоп К1гк чевыхэлементовсоод; но(гь cooTBorcTfK.HHoc
}усовойи ПЛЮСОВОЙ шинами источника пита-
к J.
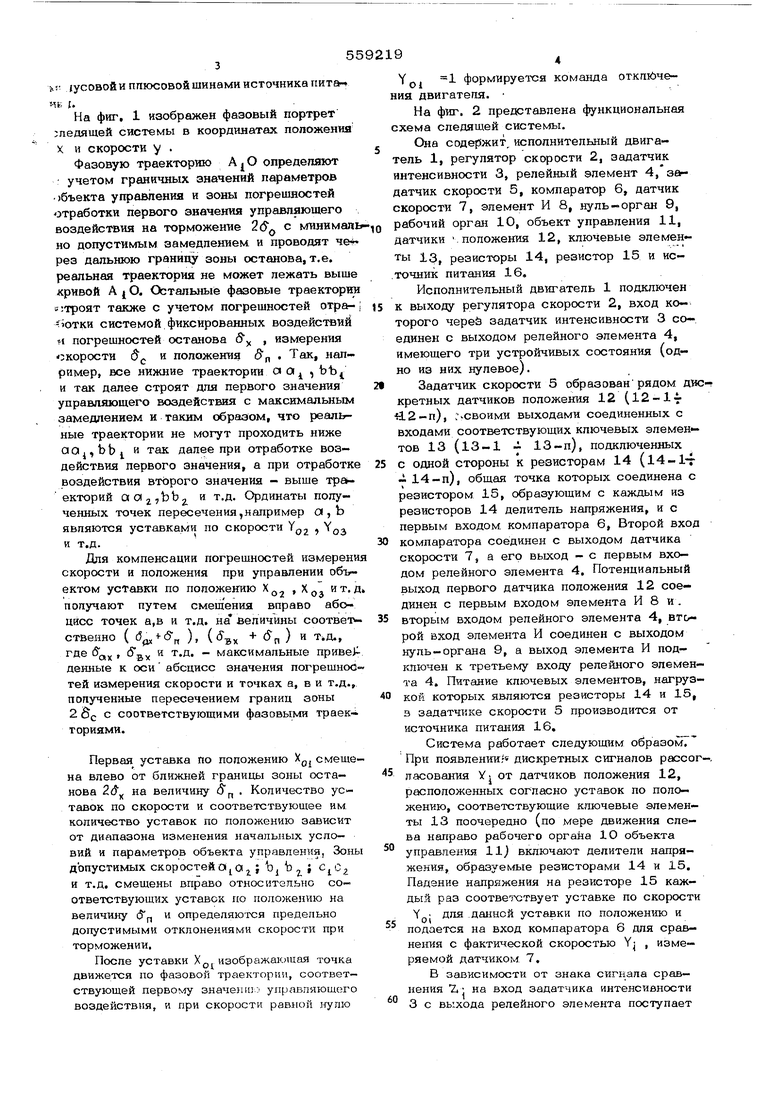
На фиг, 1 изображен фазовый портрет педящей системы в координатах попоженна X и скорости у .
Фазовую траекторию А О определяют : учетом граничных значений параметров бъекта управления и зоны погрешностей тработки первого значения управляющего воздействия на торможение 26 с минимально допустимым замедлением и проводят че« рез дальнюю границу зоны останова, т.е. реальная траектория не может лежать выше кривой А J О. Остальные фазовые траектории :троят также с учетом погрешностей отра- j ютки системой фиксированных воздействий ti погрешностей останова 8y , измерения скорости д и положения йр . Так, нап ример, все нижние траектории а а , ЬЪ и так далее строят для первого значения управляющего воздействия с максимальным замедлением и таким образом, что реальные траектории не могут проходить ниже аа,ЬЬ) и так далее при отработке воздействия первого значения, а при отработке воздействия второго значения - выше траь. екторий 0(0(j,bb2 и т.д. Ординаты полученных точек пересечения,например с«, b являются уставками по скорости Yg2 YQ и т.д.
Для компенсации погрешностей измерения скорости и положения при управлении об-ыектом уставки по положению Х оз -Д получают путем смещения вправо абоцисс точек а,в и т.д. на величины соответ. ственно ( й + б- ), (8 « 5п ) и т.д., где (Уд , сУц и т.д. - максимальные приве денные к оси абсцисс значения погрешностей измерения скорости и точках а, в и т.д., полученные пересечением границ зоны 2 DC с соответствующими фазовыми траекториями.
Первая уставка по положению XQJ смещена влево от ближней границы зоны останова 2д на величину S , Количество уставок по скорости и соответствующее им количество уставок по положению зависит от диапазона изменения начальных условий и параметров объекта управления, Зоны допустимых скоростейа о,, ; Ъ Ь,, ; и т.д. смещены вправо относительно соответствующих уставок по положению на величину (Ур и определяются предельно допустимыми отклонениями скорости при торможении.
После уставки Х изображающая точка движется по фазовой траектории, соответствующей перво 1у значенн.: управляющего воздействия, и при скорости равной jryrno
YOJ -1 формируется команда отклйчения двигателя.
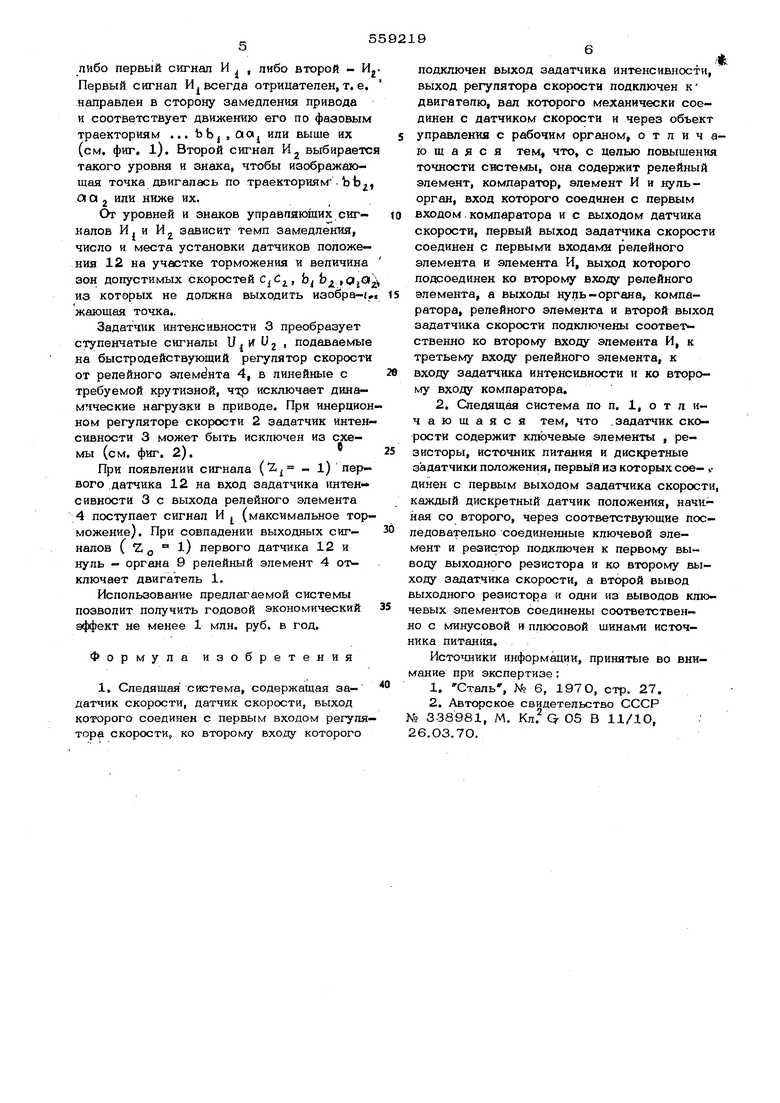
На фиг. 2 представлена функциональная схема следящей системы.
Она содержит, исполнительный двигатель 1, регулятор скорости 2, задатчик интенсивности 3, релейный элемент 4, загдатчик скорости 5, компаратор 6, датчик скорости 7, элемент И 8, нуль-орган 9, рабочий орган 10, объект управления 11, Датчики .положения 12, ключевые элементы 13, резисторы 14, резистор 15 и ис.точник питания 16,
Исполнительный двигатель 1 подключен к выходу регулятора скорости 2, вход которого черей задатчик интенсивности 3 соединен с выходом релейного элемента 4, имеющего три устройчивых состояния (одно из них нулевое).
Задатчик скорости 5 образованрядом дискретных датчиков положения 12 (12-17 2-п), : cвoим;и выходами соединенных с входами соответствующих ключевых элементов 13 (l3-l - 13-п), подключенных 5 с одной стороны к резисторам 14 (14-14 .i 14 -п), общая точка которых соединена с резистором 15, образующим с каждым из резисторов 14 делитель напряжения, и с первым входом, компаратора 6, Второй вход компаратора соединен с выходом датчика скорости 7, а его выход - с первым входом релейного элемента 4. Потенциальный выход первого датчика положения 12 соединен с первым входом элемента И 8 и . вторым входом релейного элемента 4, второй вход элемента И соединен с выходом нуль -органа 9, а выход элемента И подключен к третьему входу релейного элемента 4. Питание ключевых элементов, нагрузкой которых являются резисторы 14 и 15, 3 задатчкке скорости 5 производится от источника питания 16,
Система работает следующим образомГ При появлении- дискретных сигналов разсог-, пасования Yj от датчиков положения 12, расположенных уставок по положению, соответствующие ключевые элементы 13 поочередно (по мере движения слева направо рабочего органа 10 объекта ° управления 11J включают делители напряжения, образуемые резисторам.и 14 и 15. Падение напряжения на резисторе 15 каждый раз cooTBeixiTByeT уставке по скорости
YQJ ДЛЯ данной уставки по положению и подается на вход компаратора 6 для сравнения с фактической скоростью YJ , измеряемой датчиком. 7.
В зависимости от знака сигнала сравнения Т.- на вход задатчика интенсивности 3 с выхода релейного элемента поступает либо первый сигнал И . , либо второй - И Первый сигнал Навсегда отрицателен, т. е. направлен в сторону замедления привода и соответствует движению его по фазовым траекториям ... bb , аа или выше их (см. фиг, l). Второй сигнал Hj выбирается такого уровня и знака, чтобы изображающая точка двигалась по траекториям - ЬЬ,, or а 2 или ниже их. От уровней и знаков управпяюгаих сигналов И. и И2 зависит темп замедления, число и места установки датчиков положения 12 на участке торможения и величина зон допустимых скоростей , bj b,cijQi i, из которых не должна выходить изобра-i,., жаюшая точка.. Задатчик интенсивности 3 преобразует ступенчатые сигналы U И U 2 i подаваемы на быстродействующий регулятор скорост от релейного элемента 4, в линейные с требуемой крутизной, чтчэ исключает динамические нагрузки в приводе. При инерцио ном регуляторе скорости 2 задатчик интен сивности 3 может быть исключен из схемы (см. фиг. 2). При появлении сигнала ( - 1) первого .датчика 12 на вход задатчика интенсивности 3 с выхода релейного элемента 4 поступает сигнал И (максимальное тор можение). При совпадении выходных сигналов ( Z, д 1) первого датчика 12 и нуль - органа 9 релейный элемент 4 отключает двигатель 1. Использование предлагаемой системы позволит получить годовой экономический эффект не менее 1 млн. руб. в год. Формула изобретения 1. Следящая система, содержащая задатчик скорости, датчик скорости, выход которого соединен с первым входом регуля тора скорости, ко второму входу которого подключен выход задатчика интенсивности, выход регулятора скорости подключен кдвигателю, вал которого механически соединен с датчиком скорости и через объект управления с рабочим органом, отличающаяся тем, что, с целью повышения точности системы, она содержит релейный элемент, компаратор, элемент И и нуль- орган, вход которого соединен с первым входом. компаратора и с выходом датчика скорости, первый выход задатчика скорости соединен с первыми входами релейного элемента и элемента И, выход которого подсоединен ко второму входу релейного элемента, а выхош 1 нуль-органа, компаратора, релейного элемента и второй выход задатчика скорости подключены соответственно ко второму входу элемента И, к третьему входу релейного элемента, к входу задатчика интенсивности и ко второму входу компаратора. 2. Следящая система по п. 1, о т л ичающаяся тем, что .задатчик скорости содержит клк)чевые элементы , резисторы, источник питания и дискретные задатчикн положения, первый из которых сое- динен с первым выходом задатчика скорости, каждый дискретный датчик положения, начиная со второго, через соответствующие последовательно соединенные ключевой элемент и резистор подключен к первому выводу выходного резистора и ко второму выходу задатчика скорости, а второй вывод выходного резистора и одни из выводов ключевых элементов соединены соответственно с минусовой н плюсовой шинами источника питания. Источники информации, принятые во внимание при экспертизе; 1.Сталь, № 6, 197 О, стр. 27. 2.Авторское свидетельство СССР 3-38981, М. Кл. Q 05 В 11/1О, 26.О3.7О. . 1
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЙ ТЕРМОРЕГУЛЯТОР ДЛЯ ЭЛЕКТРОУТЮГА | 1992 |
|
RU2078371C1 |
| Устройство для следящего рекуперативнореостатного торможения транспортного средства | 1980 |
|
SU882790A1 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Устройство для управления током луча электронно-лучевой термической установки | 1980 |
|
SU877801A1 |
| ЭЛЕКТРОУТЮГ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ | 1993 |
|
RU2043442C1 |
| Стенд для испытания тяговых генераторов | 1981 |
|
SU1178639A1 |
| Электропривод | 1989 |
|
SU1697236A1 |
| Электронное реле частоты | 1977 |
|
SU661255A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| СЛЕДЯЩИЙ КЛАПАННЫЙ ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2188343C2 |
:G гД/2 А Д Ли Z5}i Sn Фиг.г
