Изобретение может быть использовано для привода рабочих органов различных установок в энергомашиностроении, судостроении и других отраслях.
Известна "Электрогидравлическая сервосистема" по патенту США 4612489, МКИ G 05 В 5/01, содержащая командные органы, блок управления, устройство обратной связи по положению гидравлического цилиндра. К недостаткам устройства можно отнести его недостаточное быстродействие.
Известен "Электрогидравлический рабочий механизм для непрерывно перемещающегося клапана" по заявке ФРГ 3329347, МКИ G 05 D 16/20, содержащий командные органы, управляющие блоки, электрогидравлические клапаны, регулирующий элемент, блок сравнения, компараторы, ключевые элементы в цепях обмоток клапанов. К недостаткам схемы можно отнести недостаточное быстродействие и сложность гидравлической схемы.
Известна также "Автоматическая дистанционная система управления судовым дизелем" по авторскому свидетельству 1125396, МКИ F 02 D 37/00, содержащая командные органы, блок управления, электрогидравлические клапаны, соединенные с полостями гидроцилиндра, ключевые элементы в цепях обмоток клапанов, устройство обратной связи по наложению гидравлического цилиндра. К недостаткам устройства можно отнести низкое быстродействие и сложность гидравлической схемы.
Наиболее близким по технической сущности аналогом является "Электрогидравлический сервопривод" по патенту РФ 2072544, МКИ G 05 В 5/01, F 15 В 9/03, содержащий ключи управления, электрогидравлические клапаны, соединенные с полостями гидроцилиндра, ключевые элементы, датчик и задатчик тока, регулирующий элемент, в совокупности образующие форсирующий ключевой усилитель, сумматор, преобразователь напряжение/частота, устройство обратной связи по положению гидравлического цилиндра. Недостаток устройства заключается в том, что использование в качестве рабочего тела воздуха или другого газа, вследствие сжимаемости рабочего тела, практически невозможно, одновременно достичь высокого быстродействия и исключить автоколебания на стационарных режимах. Порция газа под высоким давлением питания, поступившая через клапаны в полость сервоцилиндра расширяется, вызывая движение поршня. С одной стороны, чтобы перемещение поршня на управляющий импульс было малым, с целью исключения автоколебаний, должна быть мала длительность срабатывания клапана. С другой стороны, для обеспечения высокого быстродействия привода необходимо большое проходное сечение клапана, что противоречит требованию малости перемещения при подаче управляющего импульса. Для уменьшения длительности срабатывания требуется увеличение форсирующего напряжения, которое примерно гиперболически возрастает при уменьшении длительности импульса управления. Это усложняет схемы электронных ключей и источников питания, снижает надежность привода в целом.
Предлагаемое устройство решает задачи повышения быстродействия и точности позиционирования привода, повышения его надежности.
Для решения указанных задач в сервопривод, содержащий клемму ввода задания положения поршня, датчик положения поршня, соединенный с ними блок управления, включающий в себя блок суммирования и последовательно включенные блок формирования частоты следования и длительности импульсов, а также электромагнитные пневмо/гидроклапаны, соединенные с полостями силового цилиндра, форсирующие ключевые усилителя в цепи обмотки электромагнитных клапанов, вход которых (усилителей) соединен с выходами блока формирования частоты следования и длительности импульсов (далее БФ ЧДИ) блока управления, введены первый и второй блоки компараторов, вход которых соединен с выходом блока суммирования, первый и второй элементы "ИЛИ" в цепи связи БФ ЧДИ с форсирующими ключевыми усилителями, второй вход которых соединен с выходами первого блока компараторов, дополнительные первый и второй электромагнитные пневмо/гидроклапаны, соединенные с полостями цилиндра, форсирующие ключевые усилители в цепи их обмоток, входы которых соединены с выходами второго блока компараторов, и блок дифференцирования, соединенный с выходом датчика положения и входом блока суммирования блока управления.
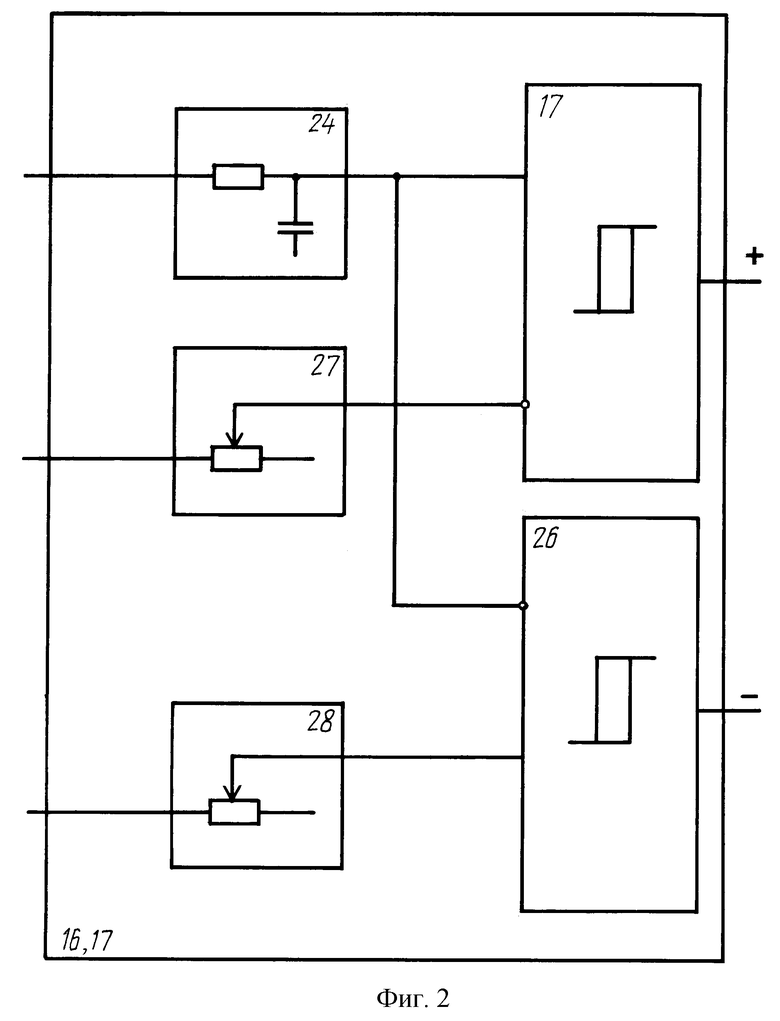
На фигуре 1 представлена функционально-принципиальная электропневматическая/гидравлическая схема привода, на фигуре 2 - принципиальная схема блока компараторов.
Привод содержит блок управления 1, включающий в себя блок суммирования 2 и блок формирования частоты следования и длительности (БФ ЧДИ) 3. К блоку суммирования 2 подключены клемма 4 ввода задания положения поршня 5 силового цилиндра 6 и датчик положения поршня 7, состоящий из первичного преобразователя 8 и вторичного преобразователя 9. К выходу БФ ЧДИ подсоединены первые входы первого элемента 10 "ИЛИ" и второго элемента 11 "ИЛИ", выходы которых соединены со входами форсирующих ключевых усилителей 12 и 13, включенных в цепь обмоток электромагнитных пневмо/гидроклапанов 14 и 15, соединенных с полостями силового цилиндра 6. Ко вторым входам элементов 10, 11 "ИЛИ" подключены выходы первого блока 16 компараторов, вход которого соединен с выходом блока 2 суммирования. К этому выходу подключен вход второго блока 17 компараторов, выход которого через форсирующие ключевые усилители 18 и 19 соединен с обмотками дополнительных первого 20 и второго 21 электромагнитных пневмо/гидроклапанов, соединенных с полостями силового цилиндра 6. Привод содержит также блок 22 дифференцирования, вход которого соединен с выходом вторичного преобразователя датчика положения поршня 7, а выход - со входом блока суммирования 2. В силовом цилиндре предусмотрена пружина 23. Блоки компараторов 16 и 17 содержат входной фильтр 24, например RC, первый 25 и второй 26 компараторы, например, интегральные, и первый 27 и второй 28 задатчики, например, потенциометры.
Привод работает следующим образом. Величина и знак сигнала на выходе блока суммирования 2 (далее рассогласование), определяется величиной разности сигнала задания на клемме 4 и сигнала датчика положения 7 и его производной. Если абсолютная величина рассогласования меньше уставок задатчиков 27 и 28 блоков компараторов 16 и 17 на выходе последних имеет место логический "0", первый и второй дополнительные клапаны 20 и 21 закрыты, на клапаны 14 и 15 от блока компараторов 16 команд не поступает. В этом случае имеет место только импульсное срабатывание клапанов 14 и 15. Проходное сечение и длительность импульса выбирается таким образом, чтобы обеспечивать устойчивость привода и исключить автоколебания в статическом режиме. Наличие в силовом цилиндре 6 пружины 23 способствует достижению устойчивости пневмопривода тем, что расширение газа компенсируется сжатием пружины.
Проходное сечение дополнительных клапанов 20 и 21 выбирается большим, чем клапанов 14 и 15, так чтобы обеспечивалось необходимое время переходного процесса. Соответственно уставки задатчиков 27 и 28 блока компараторов 17, обозначим их "У17", выбирается большими, чем таковые блока 16, обозначим их "У16".
Если рассогласование больше уставки "У16", но меньше "У17", клапаны 20 и 21 остаются закрытыми, а клапаны 14 и 15 переходят из импульсного режима работы в потенциальный, т.е. становятся постоянно открытыми. Этим достигается движение поршня с первой большой скоростью. Если рассогласование становится больше уставок "У17", открывается соответствующий дополнительный клапан 20 или 21, что в совокупности с уже открытыми постоянно клапанами 14 и 15 обеспечивает максимально возможную скорость перемещения поршня 5. Блок дифференцирования 22 необходим для обеспечения динамической устойчивости привода. Привод может обеспечить длительность переходного процесса (0,3÷0,4)с и менее.
При наличии постоянного усилия с одной стороны поршня 5, например, за счет пружины или дифференциального выполнения поршня, клапаны 15 и 21 могут быть исключены. Вместо одного клапана с двойным пневмо/гидрораспределителем могут использоваться два клапана с одним распределителем. Функции, выполняемые блоками 1, 9, 10, 11, 16, 17, 22, могут быть реализованы как специализированными аппаратными средствами, так и программным путем с помощью универсального программируемого контроллера.
В качестве рабочей среды в приводе может использоваться и жидкость, например, вода.
Признаки заявляемого изобретения обеспечивают возникновение "сверхсуммарного" положительного эффекта, а именно повышение быстродействия и точности позиционирования привода, повышение его надежности.
По мнению авторов, заявляемое техническое решение имеет изобретательский уровень, т.к. оно для специалиста средней квалификации данного профиля явным образом не следует из уровня техники.
Изобретение является промышленно применимым, т.к. может быть использовано в качестве следящего клапанного электропневматического привода в различных отраслях народного хозяйства, а возможность его изготовления не вызывает сомнений при существующем уровне технологии изготовления объектов подобного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД | 1992 |
|
RU2072544C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ИНВЕРТОРА НАПРЯЖЕНИЯ | 2000 |
|
RU2183379C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2037262C1 |
| РЕЗЕРВИРОВАННЫЙ ИСТОЧНИК ПИТАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2003 |
|
RU2251777C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МНОГОФАЗНОГО ПЕРИОДИЧЕСКОГО СИГНАЛА | 1991 |
|
RU2017063C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241949C2 |
| КОМПРЕССОР С ГИДРОПРИВОДОМ | 2002 |
|
RU2220323C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| МОМЕНТНЫЙ ГИДРОПРИВОД | 2001 |
|
RU2197650C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2239937C2 |
Изобретение может быть использовано для привода рабочих органов различных установок в энергомашиностроении, судостроении и других отраслях. Технический результат - повышение быстродействия и точности позиционирования привода. Привод содержит блок управления, включающий в себя блок суммирования и блок формирования частоты следования и длительности (БФ ЧДИ). К блоку суммирования подключены клемма ввода задания положения поршня силового цилиндра и датчик положения поршня. К выходу БФ ЧДИ подключены первые входы элементов ИЛИ, выходы которых соединены со входами форсирующих ключевых усилителей, включенных в цепь обмоток электромагнитных клапанов, соединенных с полостями силового цилиндра. Привод также содержит первый блок компараторов, входом соединенный с выходом блока суммирования, к которому подключен вход второго блока компараторов, выход которого через другие форсирующие ключевые усилители соединен с обмотками дополнительных электромагнитных клапанов. Привод содержит также блок дифференцирования, вход которого соединен с выходом вторичного преобразователя датчика положения поршня, а выход - со входом блока суммирования. 2 ил.
Следящий клапанный электропневматический привод, содержащий клемму ввода задания положения поршня, датчик положения поршня, соединенный с ними блок управления, включающий в себя последовательно соединенные блок суммирования и блок формирования частоты следования и длительности импульсов, а также электромагнитные пневмогидроклапаны, соединенные с полостями силового цилиндра, форсирующие ключевые усилители в цепях обмоток упомянутых электромагнитных клапанов, причем входы форсирующих ключевых усилителей соединены с выходами блока формирования частоты следования и длительности импульсов блока управления, отличающийся тем, что в нем установлены первый и второй блоки компараторов, входы которых соединены с выходом блока суммирования, первый и второй элементы ИЛИ в цепях связи блока формирования частоты следования и длительности импульсов с форсирующими ключевыми усилителями, вторые входы элементов ИЛИ соединены с выходами первого блока компараторов, а также дополнительные первый и второй электромагнитные пневмогидроклапаны, соединенные с полостями силового цилиндра, форсирующие ключевые усилители в цепях обмоток дополнительных первого и второго пневмогидроклапанов, входы которых соединены с выходами второго блока компараторов, и блок дифференцирования, соединенный с выходом датчика положения и входом блока суммирования блока управления.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД | 1992 |
|
RU2072544C1 |
| УСТРОЙСТВО ИНЖЕКТИРОВАНИЯ СМОЛЫ ДЛЯ БУРИЛЬНОГО УСТРОЙСТВА ДЛЯ УСТАНОВКИ АНКЕРНЫХ БОЛТОВ В ГРУНТ | 2012 |
|
RU2600120C2 |
| DE 3939038 A1, 29.05.1991 | |||
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД И СТРУЙНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 1995 |
|
RU2089756C1 |
| Автоматическая дистанционная система управления судовым дизелем | 1983 |
|
SU1125396A1 |
| US 4612489 А, 16.09.1986 | |||
| DE 3329347 А1, 28.02.1985. | |||

