со
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный электропривод | 1986 |
|
SU1381677A1 |
| Устройство автоматического управления приводами агрегата при наборе заданной массы полосы на моталке | 1984 |
|
SU1186304A1 |
| Способ и комплекс автоматического регулирования параметров перемещения скипового подъема доменной печи | 2020 |
|
RU2751364C1 |
| Следящая система | 1975 |
|
SU559219A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453822C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2014 |
|
RU2551865C1 |
| Индикатор оптимального режима движения автобуса с дизельным двигателем | 1986 |
|
SU1390601A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2013 |
|
RU2534597C1 |
| Устройство автоматического регулирования частоты и перетоков активной мощности в энергосистеме | 1982 |
|
SU1089698A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОДИНАМИЧЕСКОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2432269C1 |

Изобретение относится к электротехнике и может быть использовано в электроприводах шахтных подъемных установок, скоростных лифтов. Целью изобретения является повышение быстродействия. Электропривод содержит последовательно соединенные задатчик уставок, задатчик скорости, двукратно-интегрирующий задатчик интенсивности, систему авторегулирования скорости и датчик положения. В данном электроприводе регулируется скорость, ускорение и рывок, программируемые задатчиком интенсивности, а также дополнительно задается сигнал ускорения, величина которого выбирается из условия компенсации динамической составляющей тока.7 ил.
Изобретение относится к электротехнике и может быть использовано в электроприводе механизмов, перемещение которых должно производиться по сложной траектории с ограничением скорости, ускорения и рывка.
Целью изобретения является повышение быстродействия.
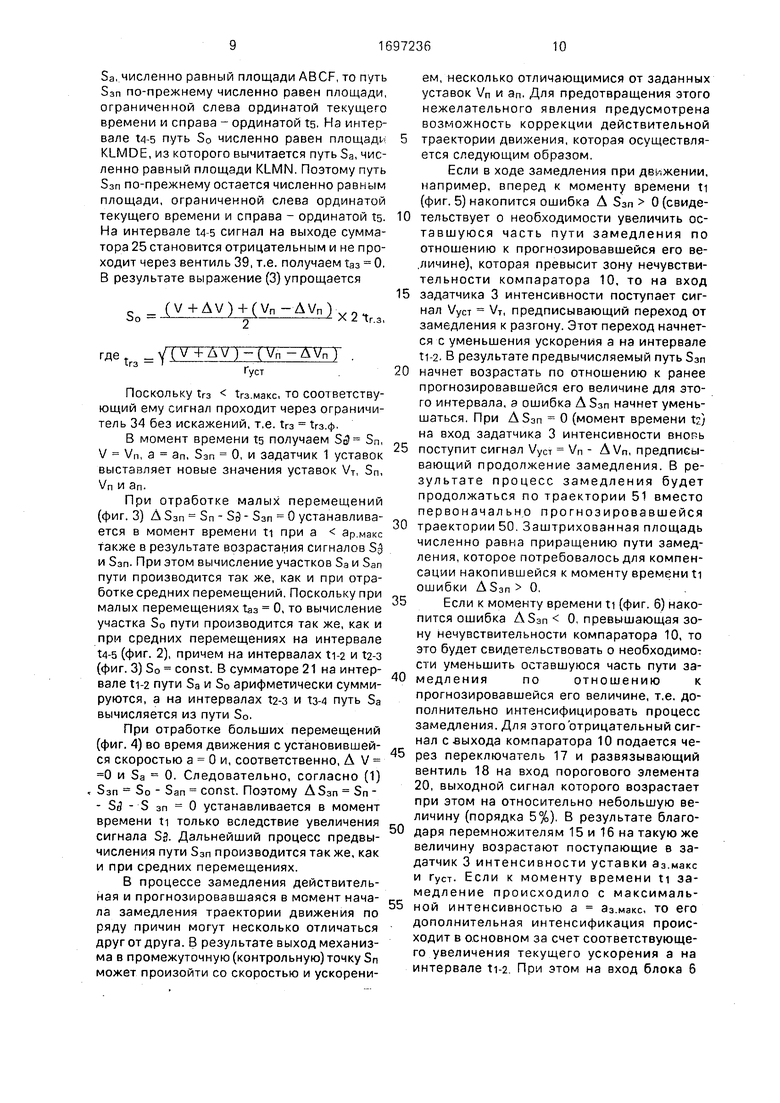
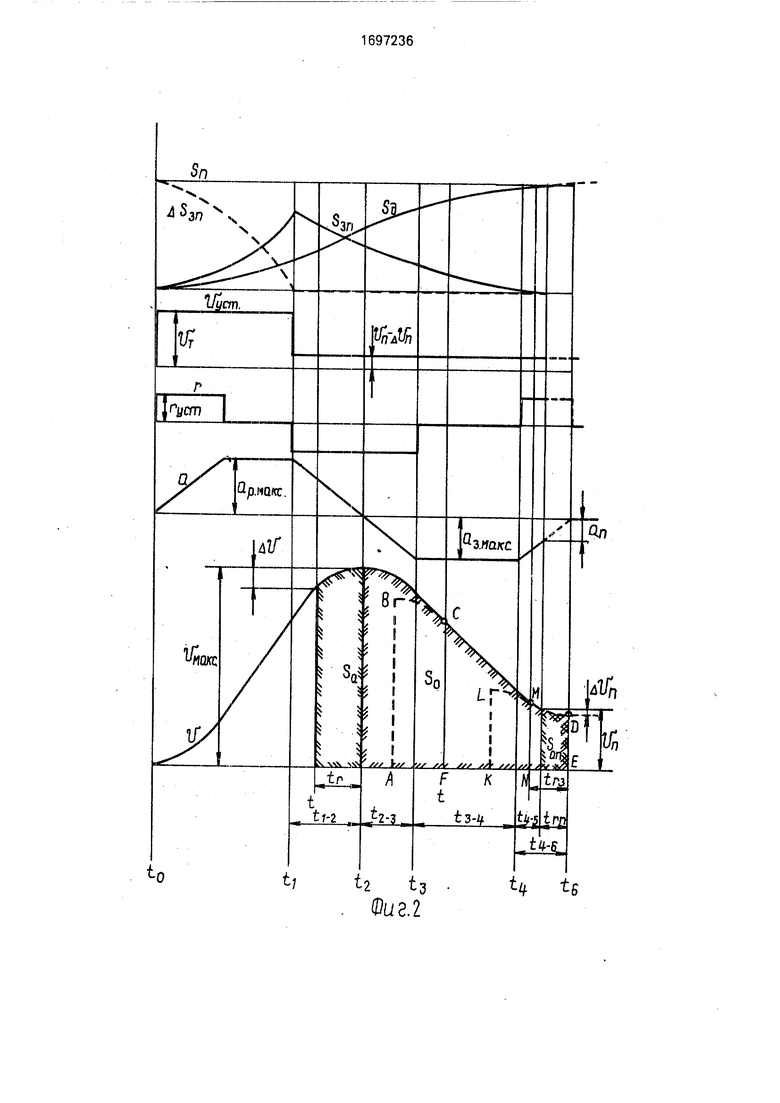
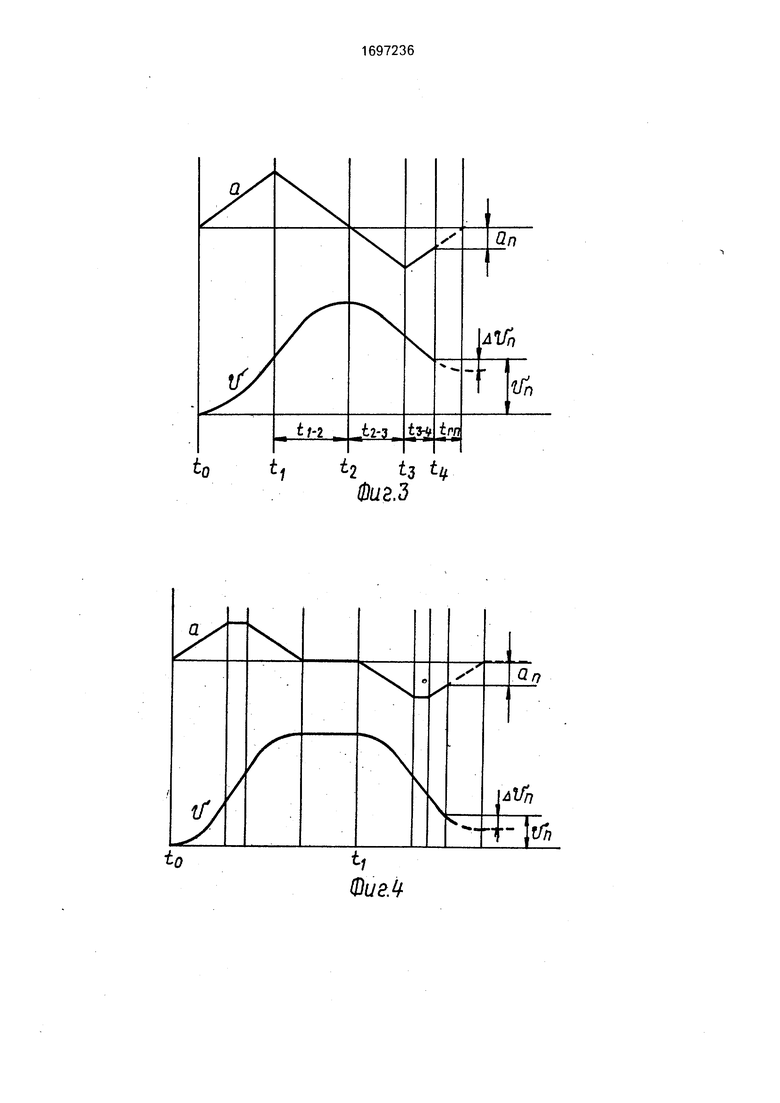
На фиг. 1 приведена функциональная схема электропривода; на фиг 2- 4 - графики изменения сигналов во время отработки соответственно средних, малых и больших заданных перемещений; на фиг. 5-7 - графики изменения сигналов в результате коррекции действительной траектории движения.
На фиг. 1-7 обозначены следующие сигналы и параметры: Sn и S3 заданного для пррмежуточной (контрольной) точки пути и действительного перемещений соответственно; So, Sa, San и S3n - предвычисленных перемещений; Л S - Sn - Stf и A S3n AS- S3n - ошибок по перемещениям; W - уставки текущей скорости; Vn и ап - соответственно уставки скорости и ускорения в промежуточной (контрольной) точке Sn пути; армакс и аэ макс - уставки максимального ускорения для периодов разгона и замедления соответственно; г и Густ - рывок и его уставка; Vycr - уставка скорости в текущий момент времени; V и а - текущие соответственно, скорость и ускорение; А V и A Vn - приращения скоростей V и Vn соответственно; tote - фиксированные моменты времени; ti-2, t2-3. t3-4, t4-5, t.4-6 - интервалы времени, tr - время изменения ускорения от текущего значения до нуля или наоборот; tra - время замедления ускорения в период замедления от текущего значения до нуля; 1Гзмакс - интервал времени, в течение которого усО
чэ
vj N0
Сл
ON
корение изменяется от величины уставки аз.макс до нуля или наоборот; 1аз - время, в течение которого замедление производится с интенсивностью а3.макс; tra-ф фиктивное время; trn - время, в течение которого ускорение изменяется от величины уставки ап до нуля; t - текущее время.
Электропривод содержит последовательно соединенные задатчик 1 уставок, задатчик 2 скорости, двукратно-интегрирующий задатчик 3 интенсивности, систему 4 авторегулирования скорости и датчик 5 положения, выход которого подключен к второму входу задатчика 2 скорости, а также блок 6 предвычисления пути замедления, подключенный первым и вторым входами соответственно к первому выходу задатчика 3 и через ограничитель 7 напряжения к второму выходу задатчика 3 интенсивности, а первым и вторым выходами соединен с третьим и четвертым входами задатчика 2 скорости. Задатчик 2 скорости содержит первый 8 и второй 9 сумматоры, компаратор 10, первый 11 и второй 12 пороговые элементы, первый управляемый переключатель 13 и триггер 14, первые входы первого 11 и второго 12 пороговых элементов подключены к первому выходу уставки текущей скорости задатчика 1 уставок, вторые входы первого 11 и второго 12 пороговых элементов подключены к второму выходу блока 6 предвычисления путч/1 замедления, к третьему и четвертому входам которого подключены выходы уставок скорости и ускорения задатчика 1 уставок, выходы уставок рывка и максимальной интенсивности замедления задатчика 1 уставок подключены к второму итретьему входу задатчика 3 интенсивности через первый 15 и второй -16 перемножители, к другим входам которых подключен соответственно выход компаратора 10 через второй управляемый переключатель 17, развязывающие первый 18 и второй 19 вентили, третий пороговый элемент 20, управляющие входы первого 13 и второго 17 переключателей подключены соответственно к выходу сумматора 8 через триггер 14, выход которого соединен с вторыми входами первого и второго перемножителей, при этом блок 6 предвычисления пути замедления содержит первый 21, второй 22, третий 23, четвертый 24, пятый 25 сумматоры, третий 26, четвертый 27, пятый 28 умножители, первый 29, второй 30, третий 31, четвертый 32 блоки деления, блок 33 извлечения корня квадратного, блок 34 ре- улируемого ограничения, первый 35, второй 36, третий 37, четвертый 38 блоки масштабирующих усилителей, третий 39
вентиль, шестой 40, седьмой 41, восьмой 42, девятый 43, десятый 44 сумматоры, шестой 45, седьмой 46 умножители, пятый 47 масштабирующий усилитель, первый вход которого является четвертым входом блока 6 предвычисления пути замедления, второй вход блока 47 одновременно соединен с входом шестого умножителя 45 и выходом задания ускорения задатчика 1, второй вход
умножителя 45 одновременно соединен с выходом блока 47 и входом блока 46, выход которого соединен с вторым входом сумматора 42, первый вход которого соединен с выходом сумматора 21, первый и второй
входы которого соответственно соединены с выходами пятого 28 и третьего 26 умножителей, первый и второй входы умножителя 28 соответственно соединены с выходом сумматора 24 и третьим масштабирующим
усилителем 37, вход которого через третий вентиль, сумматор 25, блок 30 деления соединен с третьим входом блока 6, второй вход которого соединен через умножитель 27, блок 36 и 35 с вторым входом сумматора
22, первый вход которого соединен с входом сумматора 23 и первым входом блока 6, выход сумматора 23 соединен одновременно с входами сумматоров 43 и 44, выходы которых одновременно соединены с
вторыми входами блоков 30 и 32, выход блока 32 соединен через блок 33, блок 34 и блок 38 с вторым входом сумматора 24, первый выход блока 6 соединен с выходом сумматора 42, а второй выход блока 6 соединен с выходом сумматора 40, первый вход которого соединен с выходом задания скорости задатчика 1 и через первый вход сумматора 41 с выходом блока 48, вход которого соединен с вторым входом
сумматора 40, выход блока 48 через блок 49 соединен с выходом умножителя 45.
Электропривод работает следующим образом.
Заданное перемещение Sn всегда поло5 жительно (или равно нулю) и изменяется ступенчато, Действительное перемещение также положительно и при движении вперед возрастает, а при движении назад - уменьшается. Следовательно, знак ошибки
0 Д S Sn - S определяет требуемое направление движения: при AS 0 необходимо двигаться вперед, при AS 0 - назад. Поэтому управление переключателем 13 выбора направления движения производится
5 сигналом AS через достаточно чувствительный триггер 14, который позволяет исключить неопределенность при AS 0.
Для реализации движения по сложной оптимальной траектории команду на начало замедления необходимо подавать в такой точке пути, чтобы выход приводимого механизма в промежуточную (контрольную) точку Si) Sn произошел с предварительно заданными уставками Vn и ап соответствен- 5 но скорости и ускорения. С этой целью ожидаемый путь замедления 5эп непрерывно предвычисляется в блоке 6, как функция текущих и ожидаемых параметров движения (скорости, ускорения и рывка), которые в 10 своей совокупности однозначно прогнозируют (т,е. определяют) процесс замедления. Предвычисленный путь AS3n поступает на вход сумматора 9, на выходе которого формируется ошибка АЗзп AS - 5зп 3п - S& 15 S3n. Если ошибка AS3n превышает зону нечувствительности компаратора 10 (эта зона определяет разрешающую способность, т.е. чувствительность системы позиционирования) и, например, требуется движение 20 вперед (.Д S 0), то с выхода порогового элемента 11 через переключатель 13 на вход задатчика 3 интенсивности поступает сигнал Vycr VT и механизм начинает разгоняться.25
Скорость, ускорение и рывок механизма программируются задатчиком 3 интенсивности, выполненным по одной из известных схем, причем в систему 4 авторегулирования скорости на вход регулятора 30 тока (не показан) дополнительно подается сигнал а текущего заданного ускорения, величина которого выбирается из условия компенсации динамической составляющей тока (а значит, и момента) двигателя. В этих 35 условиях задаваемые задатчиком 3 интенсивности скорость и ускорение отрабатываются системой 4 практически без искажений и запаздываний. Поэтому можно полагать, что задаваемые и действительные 40 скорость и ускорение практически совпадают. Следовательно, для предвычисления пути замедления можно использовать вырабатываемые задатчиком 3 интенсивности сигналы скорости и ускорения, 45 которые в отличие от действительных параметров движения не содержат помех и поэтому являются предпочтительными.
Когда вследствие возрастания сигналов Зд и Ззп (на равномерном ходу- только 50 сигнала Зэ) ошибка Д S3n обратится в нуль, на выходе компаратора 10 также установится нулевой сигнал и на вход задатчика 3 интенсивности поступит сигнал Vyc (Vn - Vn) Vr В результате начнется программи-55 руемый задатчиком 3 интенсивности проесс замедления. Выход механизма в точку S3 Sn должен произойти со скоростью V Vn и ускорением а ап. В этой
точке задатчик 1 уставок, выполненный по одной из известных схем, выдает новые значения уставок VT, Sn, Vn и an, которые определяют процесс движения на следующем участке пути. При этом в качестве следующей промежуточной (контрольной) точки Sn выбирается такая ближаГ.шэя по пути движения точка, установка скорости в которой удовлетворяет условию Vn VT, поскольку при Vn VT происходит разгон или равномерное движение и поэтому предвычисление точки начала замедления не имеет смысла.
В зависимости от величины заданного перемещения при его отработке возможны варианты переходного процесса. При малых заданиях не успевают достичь установившихся (т.е. максимальных) величин скорость и ускорение, при средних заданиях не успевает достичь установившейся величины только скорость. Наиболее общим является случай отработки среднего задания. Поэтому применительно к нему и рассмотрим процесс предвычисления пути Ззп блоком 6, которое производится в функции сигналов V, a, Vn, ап , Густ и а3 макс. При этом знаки сигналов V, Vn, густ и а3.Макс совпадают с направлением перемещения (вперед +, + назад -), знак сигнала ап противоположен направлению перемещения, а знак сигнала а зависит как от направления перемещения, так и от режима движения (разгон или замедление):
В момент времени to (фиг. 2) начался разгон, например, вперед для отработки за- данно го перемещения Sn с условием выхода в соответствующую ему промежуточную (контрольную) точку траектории (соответствует моменту времени ts) со скоростью Vn и ускорением ап. В процессе разгона в момент времени ti вследствие сигналов S3 и Ззп ошибка Д3ЗП обратилась в нуль и началось замедление. При этом путь замедления Ззп для текущего времени ti t t2 численно равен алгебраической сумме оконтуренных штриховыми линиями площадей (т.е. участков пути):
Ззп За + So - San,(1)
где За - путь, обусловленный ненулевым значением ускорения в текущий момент времени t;
So - путь замедления при нулевых значениях ускорения в его начальной и конечной точках;
San - фиктивный путь замедления, обусловленный нулевым значением ускорения an.
Путь Sa составляет
t2
где Т.2
/ V dt () -tr, (2)
t
at2
2
3
AV
густ 2 Время t2 вычисляется (фиг. 1) делителем 29, приращение AV скорости - перемножителем 27 и масштабным усилителем
о 36, сумма V + А V - масштабным усилио
телем 35 и сумматором 22, а произведение
о
(V + А V ) х tr перемножителем 26.
О
Путь So составляет (фиг. 2)
te So- / v
t2 ( 2 Хгз.макс taa )
Зэ.макс .f
где ta.MaKc t 2 - 3 - t 4 - 6
.- (V+AV)(Vn-AVn) at2
(3)
Густ
ta.3 - ( 1г.з.макс Ь taa ) tr-.з.макс - t 3 - 4 I
, f (V+AV)-(Vrf-AVn) .
из.макс г Т.аз
аз.макс
AVn
3n trn
3n
0,Ч11r
Густ
На интервалах ti-2 и t2-3 соблюдается условие V +A V 7макс const, так как изменение скорости V компенсируется равным, по величине и противоположным по знаку изменением приращения AV. Очевидно, на этих интервалах соблюдается и равенство taa т.з-4, a Vn - A Vn const по условию, Следовательно, в процессе замедления при ti t ts So const. Сумма V+ AV вычисляется (фиг. 1) сумматором 23, время trn - делителем 47, приращение AVn - перемножителем 45 и масштабным усилителем 49, разность Vn - A Vn - сумматором 40, полусум(V +AV) + (Vn -AVn) ма о - сУммато
ром 43 и масштабным усилителем 37, разность (V + А V) - (Vn - A Vn) - сумматором 44, время trs.waKc + taa - делителем 30, время trs.MaKc - делителем 31, время taa - сумматором 25. Поскольку при отработке средних- перемещений на интервале ti t t4 всегда taa 0, то соответствующий ему сигнал проходит через вентиль 39 на вход сумматора 24. Сигнал, соответствующий т.гз.макс поступает также на ограничивающий вход ограничителя 34. На основной вход этого
ограничителя поступает сигнал, соответствующий фиктивному времени tra.|
y(V+AV)-(Vn-AVn) , который ГУСТ
вычисляется делителем 32 и блоком 33 извлечения квадратного корня. Так как при отработке средних перемещений на интервале t1 t t4 всегда tra-ф 1гз.макс, то сигнал на выходе ограничителя 34 соответствует 1гз.макс. Его удвоенная величина вычисляется масштабным усилителем 38, суммарное время 2т.гз.макс + taa сумматором 24, а произведение (V+AV)+(Vn-AVn) Ґ 2Х
X ( 21гз.макс + tas ), перемножителем 28.
Путь San в процессе замедления сохраняется постоянным и составляет te0
V-dt() trn,
15
где разность Vn
4AVn
вычисляется
5 масштабным усилителем 48 и сумматором
о 41, а произведение ( Vn - -q- A Vn) x trn перемножителем 46.
Путь 5зп в целом вычисляется по форму0 ле (1) сумматорами 21 и 42.
В процессе замедления (т.е. при ti t ts) предвычисляемый путь S3n непрерывно уменьшается, оставаясь в любой момент времени равным ошибке A S Sn - S3 (т.е.
35 численно равен площади, ограниченной слева ординатой текущего времени, справа - ординатой ts и сверху - кривой скорости). Поэтому в процессе замедления ошибка ДЗзп 0. Действительно, на интер40 вале ti-2 путь Sa по мере уменьшения ускорения а и, соответственно, времени tr согласно (2) также уменьшается и обращается в нуль при t t2, а участки пути So и San, как было показано, сохраняются посто45 янными. На интервале t2-3 вследствие изменения знака ускорения а путь Sa становится отрицательным и численно равным площади, ограниченной слева ординатой t2, справа - ординатой текущего времени и сверху- кривой
50 скорости, Поэтому он вычитается в сумматоре 21 из пути So, который по-прежнему сохраняется постоянным. На интервале т.з-4 а аз.макс и поэтому приращение А V сохраняется постоянным и максимальным. Поэто55 му оно уже не компенсирует уменьшение текущей скорости V. Кроме того, уменьшается ta3 t4 -1. Поэтому согласно (3) путь So также уменьшается. Например, для текущего времени t он численно равен площади ABCDE. Но так как из него вычитается путь
Sa, численно равный площади ABCF, то путь Ззп по-прежнему численно равен площади, ограниченной слева ординатой текущего времени и справа - ординатой ts. На интервале t/i-5 путь So численно равен площади KLMDE, из которого вычитается путь Sa, численно равный площади KLMN. Поэтому путь Ззп по-прежнему остается численно равным площади, ограниченной слева ординатой текущего времени и справа - ординатой ts. На интервале t4-5 сигнал на выходе сумматора 25 становится отрицательным и не проходит через вентиль 39, т.е. получаем taa 0. В результате выражение (3) упрощается
с (V+AV) + (Vn-AVn)
г-3
где t у ( V + Д V) Уп - АУгГ) .
Густ
Поскольку tra tra.макс, то соответству- ющий ему сигнал проходит через ограничитель 34 без искажений, т.е. tra trs-ф.
В момент времени ts получаем S3 Зп, V Vn, а ап, Ззп 0, и задатчик 1 уставок выставляет новые значения уставок VT, Sn, Vn и an.
При отработке малых перемещений (фиг. 3) Д Ззп Зп - S3 - Ззп 0 устанавливается в момент времени ti при а ар.Макс также в результате возрастания сигналов S3 и Ззп. При этом вычисление участков За и Зал пути производится так же, как и при отработке средних перемещений. Поскольку при малых перемещениях taa 0, то вычисление участка So пути производится так же, как и при средних перемещениях на интервале t4-5 (фиг. 2), причем на интервалах ti-2 и t2-3 (фиг. 3) So const, В сумматоре 21 на интервале п-2 пути За и So арифметически суммируются, а на интервалах t2-3 и т.з-4 путь За вычисляется из пути So.
При отработке больших перемещений (фиг. 4) во время движения с установившейся скоростью а 0 и, соответственно, А V 0 и Sa 0. Следовательно, согласно (1) S3n So - San const. Поэтому А Ззп Зп - - - S зп 0 устанавливается в момент времени ti только вследствие увеличения сигнала S3. Дальнейший процесс предвы- числения пути S3n производится так же, как и при средних перемещениях.
В процессе замедления действительная и прогнозировавшаяся в момент начала замедления траектории движения по ряду причин могут несколько отличаться друг от друга. В результате выход механизма в промежуточную (контрольную) точку Sn может произойти со скоростью и ускорением, несколько отличающимися от заданных уставок Vn и ап. Для предотвращения этого нежелательного явления предусмотрена возможность коррекции действительной 5 траектории движения, которая осуществляется следующим образом.
Если в ходе замедления при движении, например, вперед к моменту времени ti (фиг. 5) накопится ошибка А Ззп 0 (свиде- 0 тельствует о необходимости увеличить оставшуюся часть пути замедления по отношению к прогнозировавшейся его ве- .личине), которая превысит зону нечувствительности компаратора 10, то на вход
5 задатчика 3 интенсивности поступает сигнал Vycr VT, предписывающий переход от замедления к разгону. Этот переход начнется с уменьшения ускорения а на интервале ti-2. В результате предвычисляемый путь Ззп
0 начнет возрастать по отношению к ранее прогнозировавшейся его величине для этого интервала, а ошибка A San начнет уменьшаться. При А Ззп 0 (момент времени t2) на вход задатчика 3 интенсивности внопь
5 поступит сигнал Vycr Vn - A Vn, предписывающий продолжение замедления. В результате процесс замедления будет продолжаться по траектории 51 вместо первоначально прогнозировавшейся
0 траектории 50. Заштрихованная площадь численно равна приращению пути замедления, которое потребовалось для компенсации накопившейся к моменту времени ti ошибки ASan О,
5Если к моменту времени ц (фиг. 6) накопится ошибка AS3n 0, превышающая зону нечувствительности компаратора 10, то это будет свидетельствовать о необходимости уменьшить оставшуюся часть пути за0 медления по отношению к прогнозировавшейся его величине, т.е. дополнительно интенсифицировать процесс замедления. Для этого отрицательный сигнал с .выхода компаратора 10 подается че5 рез переключатель 17 и развязывающий вентиль 18 на вход порогового элемента 20, выходной сигнал которого возрастает при этом на относительно небольшую величину (порядка 5%). В результате благо0 даря перемножителям 15 и 16 на такую же величину возрастают поступающие в задатчик 3 интенсивности уставки а3. и Густ. Если к моменту времени ti замедление происходило с максималь5 ной интенсивностью а аэ.макс, то его дополнительная интенсификация происходит в основном за счет соответствующего увеличения текущего ускорения а на интервале ti-2 При этом на вход блока 6
предвычисления пути замедления благодаря ограничителю 7 продолжает поступать неизменный (прежний) сигнал текущего ускорения а. В результате уменьшения пути Ззп по отношению к ранее про- гнозировавшейся его величине и, соответственно, уменьшение по абсолютной величине ошибки А Ззп происходит только за счет вызванного увеличением сигнала а дополнительного уменьшения сигнала текущей скорости V, При A S3an О (момент времени т.2) действие коррекции прекращается и поступившие на входы задатчика 3 интенсивности уставки Зз.макс и густ скачком возвращаются к своим прежним значениям. Задатчик 3 интенсивности, выполненный по одной из известных схем, функционирует таким образом, что скачкообразное уменьшение на его входе уставки а3 макс вызывает также скачкообразное уменьшение до величины уставки и текущего ускорения а (поскольку вызванное коррекцией увеличение ускорения а относительно невелико, то его скачкообразное уменьшение до прежней величины не оказывает сколько-нибудь заметного негативного влияния на динамические усилия в узлах механизма). В результате процесс замедления будет продолжаться по траектории 53 вместо первоначально прогнозировавшейся траектории 52. Заштрихованная площадь численно равна уменьшению пути замедления, которое потребовалось для компенсации накопившейся к моменту времени ti ошибки Д53п 0.
Если в момент начала коррекции, действующий в направлении уменьшения пути замедления, а аз.макс, то коррекция происходит только за счет увеличения поступающей в задатчик 3 интенсивности уставки Густ, поскольку увеличение уставки а3 макс не влияет на траекторию движения. В этом случае действие коррекции на интервале ti-2 (фиг. 7) вызывает изменение скорости и ускорения по кривым 56 и 57 вместо первоначально прогнозировавшихся кривых 54 и 55 соответственно.
Таким образом, электропривод реализует оптимальную по быстродействию и динамичности сложную траекторию движения, которая формируется из условия прохождения промежуточных (контрольных) точек пути с желаемыми значениями скорости и ускорения.
Формула изобретения Электропривод, содержащий последовательно соединенные задатчик уставок, задатчик скорости, двухкратно-интегрирующий задатчик интенсивности, систему авторегулирования скорости с электродви
гателем и датчик положения, выход которого подключен к входу задатчика уставок и к второму входу задатчика скорости, а также блок предвычисления пути замедления,
подключенный первым и вторым входами соответственно к первому выходу двухкратно- интегрирующего задатчика интенсивности и через ограничитель напряжения - к второму выходу двухкратно-интегрирующего за0 датчика интенсивности, а первым и вторым выходами соединен с третьим и четвертым выходами задатчика скорости, второй выход задатчика интенсивности соединен с входом системы авторегулирования, о т л и ч а5 ю щ и и с я тем, что, с целью повышения быстродействия, задатчик скорости содержит триггер, первый управляемый переключатель, два пороговых элемента, а также последовательно соединенные первый и
0 второй сумматоры, компаратор1, между выходом компаратора и первым управляемым переключателем включены два пороговых элемента, первые управляющие входы которых подключены к выходу
5 уставки текущей скорости задатчика уставок, вторые управляющие входы пороговых элементов подключены к второму выходу блока предвычисления пути замед- ления, выход первого сумматора через
0 триггер соединен с управляющим входом первого переключателя, а в электропривод . введены второй управляемый переключатель, два диода, третий пороговый элемент и два перемножителя, при этом неподвиж5 ные контакты переключателя через встречно включенные диоды соединены с входом третьего порогового элемента, выход которого подключен к входам перемножителей, вторые входы которых соединены соответ0 ственно с выходами уставок максимальной интенсивности замедления и рывка задатчика уставок и с третьим и четвертым входами блока предвычисления пути замедления, выходы перемножителей соединены с вто5 рым и третьим входами двухкратно-интегрирующего задатчика интенсивности, выход уставки максимальной интенсивности разгона задатчика уставок подключен к четвертому входу гдвухкратно-интегрирую0 щего задатчика интенсивности, а выход уставки ускорения соединен с пятым входом блока предвычисления пути замедления, выход уставки максимальной интенсивности замедления соединен с управля5 ющим входом ограничителя напряжения, управляющий вход второго переключателя соединен с выходом триггера задатчика скорости, а подвижный контакт - с объединенными входами первого и второго пороговых элементов, при этом в блоке
предвычисления пути замедления задание пути вычисляется по зависимости
St3n (), + ()yvn-Avn)lif()
где
AV -ii-; tn,
Густ2
причем для больших и средних перемещений
ta.r 2 Хгз.макс Ь Т.аз.
Эз.максх
Тгз.макс; t33 (Т-Г3.макс + 1аз ) Густ
trs
макс
t-4-t (У+АУ)-(Уп-АУп)
Тгз.макс + taa ;
iЭз.макс
а для малых перемещений
ta.r 2 tra.
tra
У(У+ДУ)-(Уп-ДУпТ ,Сует
задание скорости определяется по зависимости
2 Vn -ДУП Vn -
ап
0
5
0
2 Густ
где Ззп - предвычисленное перемещение;
V, а - текущая скорость и ускорение;
Уп, ап - уставка скорости и ускорения;
tr, tm - соответственно время изменения ускорения от текущего значения до нуля и время, в течение которого ускорение изменяется от величины уставки до нуля;
Густ - уставка рывка;
А V, Д Уп - приращение скорости соответственно V и Уп;
аз.макс - уставка максимального ускорения замедления;
taa - время, в течение которого замедление производится с интенсивностью аэ.макс;
Аз.макс - интервал времени, в течение которого ускорение изменяется от величины уставки аз.макс ДО нуля.
t2 t3 Фиг.г
Ч tfi
Л
t;-a
t3
Фаа.з
If;
/
to
fft
-tl-r
i
Јлл
Фт
+Fi
| Позиционный электропривод постоянного тока | 1984 |
|
SU1246313A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Позиционный электропривод | 1986 |
|
SU1381677A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
