входом блока коррекции уставок, а четвертый выход датчика холостого хода соединен с первым входом четвертого элемента ИЛИ, выход которого подключен к второму входу блока безынерционной защиты, выход которого подключен к реле, выход реле и выход блока инерционной защиты соединены соответственно с вторым и третьим входами блока управления горной машиной, при этом задатчик уставки защиты подключен к второму входу четвертого элемента ШШ, первьй выход релейного усилителя соединен через блок коррекции зоны нечувствительности с вторым входом второго элемента ШШ, выходы задатчика порога и порогового элемента связаны с вторым входом генератора импульсов, а выход первого блока сравнения с вторым входомвторого блока сравнения
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор нагрузки горной машины | 1974 |
|
SU581270A1 |
| Способ управления горной машиной и устройство для его осуществления | 1983 |
|
SU1105640A1 |
| Способ управления нагрузкой горной машины и устройство для его осуществления | 1989 |
|
SU1707199A1 |
| Устройство для защиты от перегрузки двигателей горных машин | 1976 |
|
SU653671A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство автоматического управления скоростью подачи угледобывающего комбайна | 1986 |
|
SU1518511A1 |
| Многодвигательный электропривод | 1985 |
|
SU1348979A1 |
| Устройство дискретного управления режимом работы погрузочной машины с нагребными лапами | 1982 |
|
SU1068596A1 |
| Устройство автоматического управления выемочной машиной | 1980 |
|
SU877000A1 |
| Устройство автоматического управления выемочной машиной | 1977 |
|
SU750065A1 |
РЕГУЛЯТОР НАГРУЗКИ ГОРНОЙ МАШИНЫ, содержащий датчик нагрузки, задатчик уставки, блок коррекции уставок, два элемента ИЛИ, выход первого из которых соединен с первым входом первого блока сравнения, релейный усилитель, первый выход которого подключен к входу блока управления горной машины, а также блок безынерционной защиты, выход которого подключен к входу блока инерционной защиты, отличающийся тем, что, с целью стабилизации направления бурения путем увеличения быстродействия автоматического регулирования при искривлении скважины и уменьшения динамических нагрузок, он снабжен инерционным блоком, датчиком пиковых нагрузок, датчиком холостого хода, задатчиком уставок защиты, задатчиком порога, пороговым элементом, генератором импульсов, блоком коррекции зоны нечувствительности, реле, а также вторым блоком сравнения, третьим и четвертым элементами ИЛИ и фильтром нижних частот, причем первый выход датчика пиковых нагрузок соединен с первым входом генератора импульсов, выход которого подключен к входу задатчика порога и к первому входу второго элемента ИЛИ, вькод которого связан с первым входом второго блока сравнения, выход которого соединен с входом релейного усилителя, первый и второй выходы которого подключены к первому и второму входам блока коррекции сл уставок, вькод которого подключен к первому входу третьего элемента ИЛИ, второй вход которого соединен с задатчиком уставки, а выход подключен к второму входу первого блока сравнения и к первому входу датчика пиковых нагрузок второй выход О) которого подключен к третьему входу блока коррекции уставок, выход блосо ю ка управления горной машины соединен через датчик нагрузки с фильтром СП нижних частот, выход которого под ключен к первому входу блока безинерционной защиты, через инерционный блок - к второму входу датчика пиковых нагрузок, а также к входу порогового элемента, к первому входу первого элемента ИЛИ и к входу датчика холостого хода, первый выход которого соединен с вторым входом первого элемента ИЛИ, второй выход с третьим входом третьего элемента ИЛИ, третий выход - с четвертые
1
Изобретение относится к автоматизации управления горными машинами и может быть использовано для автоматического регулирования нагрузки буровых машин, бурильных установок, проходческих и очистных комбайнов.
Целью изобретения является стабилизация направления бурения скважины и повьш1ение производительности горной машины путем увеличения быст родействия САР нагрузки горной машины при искривлении скважины и уменьшения динамических нагрузок, а также поддерживания максимального значения скорости бурения во всех режимах работы горной машины.
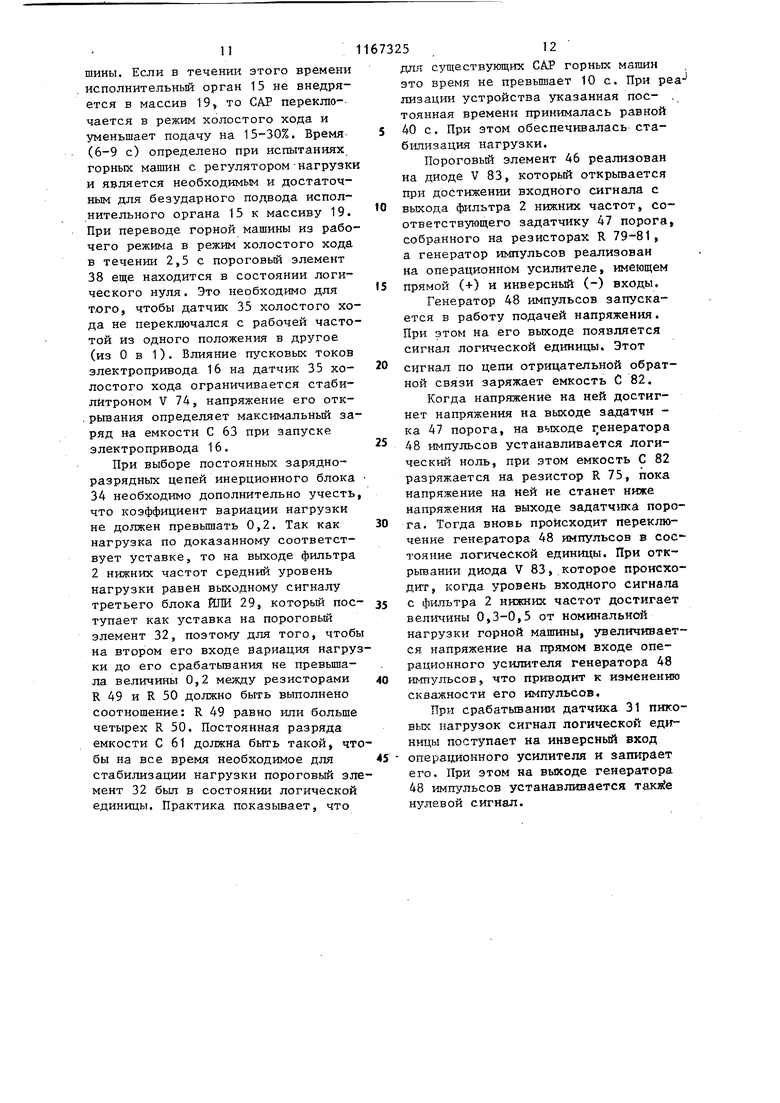
На фиг. 1 представлена блок-схема регулятора нагрузки горной ма-i шины; на фиг. 2 - примеры конкретной реализации некоторых блоков устройства, в том числе принципиальная схема генератора импульсов с пороговым элементом и задатчиком порога.
Регулятор содержит датчик 1 нагрузки, фильтр 2 нижних частот, первый логический блок ШШ 3, первьй блок 4 сравнения, второй блок 5 сравнения, релейньй усилитель б, содержащий усилитель 7 и трехпозиционный релейный блок 8, блок 9 управления горной машины, включающий сервопривод 10, соединительную муфту 11, гидродроссель 12, гидравлическу систему 13 подачи, предназначенную для создания необходимого усилия подачи на буровом ставе 14, исполнительньй орган 15, электропривод 16, -предназначенньй для создания момента на буровом ставе 14 и на исполнительном органе 15, электропривод 17 системы подачи, предназначенньй для вращения гвдронасоса 18, которьй предназначен для осуществления подачи масла в гидравлической системе 13 подачи. Исполнительный орган 15 предназначен для разрушения массива 19, блок 20 коррекции зоны нечувствительности, предназначенньй для преобразования знакопеременных сигналов с выхода релейного усилителя 6 в сигнал постоянного тока и состоящий из триггера 21, дифференцирующего блока 22, инерционного блока 23. Кроме того, регулятор содержит второй логический блок ИЛИ 24, блок 25 коррекции уставки, предназначенньй для преобразования знакопеременных импульсов релейного усилителя 6 в сигнал постоянного тока и содержащий триггер 26, дифференцирующий блок 27, инерционньй блок 28. На выходе блока 25 коррекции уставки установлен третий логический блок ИЛИ 29, к второму входу которого подключен задатчик уставки 30J к одному из входов блока коррекции уставок подключен датчик 31 пиковых нагрузок, содержащий пороговьй элемент 32, реле 33. Регулятор содержит также инерционньй блок 34, датчик 35 холостого хода, содержащий дифференцирующий блок 36, инерционньй блок 37, пороговьй элемент 38, задатчик 39 отсечки.
3
блок 40 задержки. В состав регулятора входят также четвертый логический блок ИЛИ 41, задатчик 42 уставки защиты, блок 43 безынерционной защиты, реле 44, блок 45 инерционной защиты, пороговьй элемент 46, задатчик 47 порога, генератор 48 импульсов, а также входящие в состав различных блоков резисторы 49-60, емкости 61-65, диоды 66-72, стабилитроны 73, 74, резисторы i 75-81, емкость 82, диоды 83-85 и замыкающие контакты 86, 87. Пороговые элементы 32, 38, 46 и блок 43 безынерционной защиты реализованы на компараторах, блок 45 инерционной защиты - на реле времени.
Регулятор нагрузки работает следующим образом.
Нагрузка на исполнительном органе 15 через буровой став 14 передается на электропривод 16. Датчик 1 нагрузки измеряет нагрузку электропривода 16, а фильтр нижних частот 2 из всего спектра частот нагрузки выделяет рабочий низкочастотный сигнал в диапазоне 0-0,5 Гц, ко торьй поступает на вход датчика 35 холостогб хода. Пока электропривод 16 работает в режиме холостого хода, его нагрузка практически постоянная, поэтому на вход датчика 35 холостого хода в этом случае поступает сигнал практически постоянного тока. Он не проходит через дифференцирующий блок 36, а следовательно, на выходе инерционного блока 37 сигнал равен нулю. При этом Сигнал задатчика отсечки 39 переключает пороговьй элемент 38 в состояние логической единицы, что и характеризует наступление режима холостого хода в САР. При этом через первый блок ИЛИ 3 сигнал логической единицы поступает на первьй блок 4 сравнения, где он вычитается из сигнала третьего блока ИПИ 29. Сигнал логической единицы выбирается выше сигнала задатчика 30 уставки и выходного сигнала блока коррекции уставки 25, поэтому пока не зарядятся емкость С 64 датчика холостого хода по цепи выход порогового элемента 38 - диод V 70 резистор R 57 до напряжения логической единицы, на выходе первого блока 4 сравнения сигнал отрицательныйi При этом на выходе второго блока 5 сравне673254
ния сигнал также отрицательный и по уровню, превышающий зону нечувствительности релейного усилителя 6. Трехпозиционньй релейный блок 8 мо5 жат устанавливаться в одно из трех состояний: наброса (+1), сброса (-1) и нейтральное (0) в зависимости от величины и знака сигнала рассогласования, поступающего с второго
to блока 5 сравнения. Так как при холостом ходе на выходе второго блока 5 сравнения сигнала отрицательньй, то на выходе релейного усилителя присутствует сигнал -1. При
15 этом сервопривод 10 начинает вращать муфту 11 гидродросселя 12 в сторону его закрывания, что уменьшает расход масла в гидравлической системе 13 подачи, при этом происходит уменьшение скорости подачи, а также осевого усилия на буровом ставе 14, благодаря чему сила прижатия исполнительного органа15 к массиву 19 уменьшается, что вызывает соответственное уменьшение крутящего момента на электроприводе 16. После того, как напряжение на ёмкости С 64 достигнет уровня логической единицы, на выходе первого 4 и второго 5 блоков сравнения сигналы рассогласования равны нулю, при этом на выходе релейного усилителя 6 сигнал также равен нулю и сброс нагрузки прекращается. Время сброса выбирается равным 15-30% от времени полного открйшания гвдродросселя 12, это обеспечивает соответствующее уменьшение скорости подачи (уменьшение нагрузки) перед забуриванием,
. что, как показали испытания, является достаточным для безударного внедрения исполнительного органа 15 в массив 19. Уменьшение этого времени может привести к удару при забу, ривании, а его увеличение приводит к неоправданньм потерям времени, что не позволяет достигнуть и в том и. в другом случае поставленной цели. Сигнал логической единицы на выходе g второго порогового элемента 38 поступает на третий вход блока 25 кор. рекции уставки и через диод V 68, резистор R 54 заряжает емкость С 62 до напряжения стабилизации стабилит, рона V 73, при этом на выходе третьего логического блока ИЛИ 29 устанавливается уставка, соответствующая номинальной нагрузке горной машины.
51
Выходной сигнал на емкости С 64 датчика 35 холостого хода поступает на четвертый логический блок ИЛИ 41 и с него - на вход блока 43 безынерционной защиты. Так как этот сигнал по уровню соответствует логической .единице (после заряда емкости С 64) то блок 43 безынерционной защиты при этом находится в состоянии логического нуля, и срабатьшание защиты блокируется.
После внедрения исполнительного органа 15 в массив 19 нагрузка на электроприводе 16 возрастает, но существенно в большей мере возрастает амплитуда ее колебания относительно некоторого среднего значения При холостом ходе она практически равна нулю, а после внедрения исполнительного органа 15 носит случайный характер, связанный со случайным характером разрушения массива 19. Эта случайная составляющая преобразуется, проходя дифференцирующий блок 36 и инерционный блок 37 в сигнал постоянного тока, который сравнивается по уровню с сигналом задатчика 39 отсечки, величина которого выбирается такой, чтобы при холостом ходе его уровень был выше сигнала на выходе инерционного, блока 37, а так как при холостом ходе он равен практически нулю, то уставка отсечки может быть выбрана в пределах 5-10% от номинального тока электропривода 16. Как показали промышленные испытания, этого уровня достаточно для надежного определения наличия или отсутствия холостого хода. Если этот предел уменьшить, то начинает сказываться влияние помех, если увеличить, то уменьшается рабочий диапазон регулирования нагрузки (от уровня холостого хода до номинального) , что не позволит своевременно перевести гидравлическую систему 13 подачи горной машины в режим холостого хода и из режима холостого хода -, в режим забуривания.
Как только сигнал постоянного тока достигает уставки отсечки задатчика 39 отсечки, пороговьй элемент 38 переключится в состояние логического нуля. При этом с выдержкой времени, определяемой постоянной времени разряда емкости С .64 по цепи резистор R 58 - диод
73256
V 71 - выход порогового элемента 38 на землю происходит снятие блокировки с блока 43 безынерционной защи-ты. На выходе третьего логического 5 блока ЮШ 29 устанавливается уставка, соответствующая номинальной нагрузке горной машины, которая при забуривании оказывается выше сигнала с фильтра 2 нижних частот,
О поэтому на выходе первого блока сравнения 4 ошибка рассогласования положительная. На втором блоке 5 сравнения из нее вычитаются сигналы с генератора 48 импульсов, которые приводят к работе релейного усилителя 6 в импульсном, режиме, причем импульс +1 появляется тогда, когда на выходе генератора 48 импульсов пауза и наоборот. При
0 этом сервопривод 9 начинает вращаться в сторону увеличения подачи, что приводит к росту осевой нагрузки на исполнительном органе 15, а следовательно, к росту нагрузки
5 электропривода 16. Напряжение на выходе фильтра нижних частот при этом растет и как только нагрузка на электроприводе 16 достигает величины 0,3-0,5 номинальной задаваемой задатчиком 47 порога, срабатывает пороговый элемент 46 и изменяет скважность импульсов генератора 48 импульсов таким образом, что ко-f
эффициент усиления регулятора
5 увеличивается на 40-50%. При этом скорость подачи увеличивается, что сокращает время выхода на заданный номинальный режим работы.
Возможность такого увеличения
0 обусловлена тем, что при внедрении исполнительного органа 15 в массив 19 изменяются условия его закрепления. При этом критическая по устойчивости бурового става 14 осе5 вая нагрузка, определяемая по формуле Эйлера, увеличивается минимум в два раза.
Сигнал +1 на выходе релейного усилителя 6 (Л1) производят разряд
0 емкости С 62 блока 25 коррекции уставки. При этом сигнал на выходе третьего блока ИЛИ 29 уменьшается. Как только он сравнивается с сигналом на выходе фильтра 2 нижних час55 тот, на выходе первого блока 4 сравнения в некоторой последовательности появляются сигналы разных знаков , которые вызьшают на выходе ре7лейного усилителя 6 знакопеременные импульсы (+, -1), появление ко торых указьшает на соответствие уставки уровню нагрузки горной машины. Пока на выходе релейного уси лителя 6 следуют сигналы одного зн ка, триггер 26 находится в одном из своих устойчивых состояний (о или 1) и на выходе дифференцирую щего блока 27 сигнал отсутствует, но так только в некоторой, как пра вило, случайной последовательности начинают появляться разнополярные импульсы на выходе релейного усилителя 6, триггер 26 начинает пере ключаться с частотой следования зн копеременных сигналов. При этом им пульсные сигналы с выхода триггера 26 проходят дифферендирующий блок 27, преобразуются в последовательность знакопеременных импульсов типа дельта-функций. Эти сигналы, проходя через диод V 69, резистор R 53, замкнутый контакт реле 33 да чика 31 пиковых нагрузок, преобраз ются на емкости С 62 в сигнал постоянного тока, величина которого зависит от частоты следования знакопеременных импульсов на выходе релейного усилителя 6 (чем выше частота их следования, тем вьше сиг нал постоянного тока, тем вьппе выходной сигнал блока коррекции уставки 25, а,следовательно, и блока 20 коррекции зоны нечувствительности, работающего аналогично и под ключенного к релейному усилителю 6 по цепи отрицательной обратной связи) . Постоянная времени заряда емкости С 62 выбирается таким образом чтобы напряжение на ней было выше, чем на емкости С 65 при одновременном их заряде, что обеспечивает при росте уставки нулевую зону нечувствительности релейного усилителя, так как отрицательная обратная связь релейного усилителя в этом случае компенсируется положительной, в которую включен блок 25 коррекции уставки. Нулевая зона в САР горных машин, как правило вызывает автоколебания, которые приводят к дальнейшему появлению на выходе релейного усилителя 6 знакопеременньк импульсов, а следовательно, к дальнейшему росту уставки. С ростом уставки возрастает нагрузка на исполнительном органе 58 15 горной машины. Как показывают осциллограммы нагрузок горных машин, с увеличением среднего уровня растет амплитуда колебания нагрузки вокруг среднего значения. Среднее значение нагрузки соответствует при этом уставке, которая поступает на пороговый элемент 32 датчика 31 пиковых нагрузок, на другой вход которого поступает сигнал постоянного тока, пропорциональньш амплитуде и длительности пиковых нагрузок с фильтра 2 нижних частот. При достижении заданной величины пиковых нагрузок (соответствующих максимальному коэффициенту вариации, который выбирается не более 0,2) датчик 31 пиковых нагрузок переводится в состояние логической единицы. При этом срабатывает реле 33 и своим конта ктом 33 разрывает цепь заряда емкости С 62,блока 25 коррекции уставки. Сигнал логической единицы датчика 31 пико-. вых нагрузок, кроме того, переводит генератор 48 импульсов в состояние логического нуля, чем обеспечивается перевод САР в релейньй режим работы. При этом начинается стабилизация нагрузки на достигнутом уровне, т.е. с максимальным коэффициентом усиления САР. Этим обеспечивается максимальное быстродействие. Однако устойчивая работа при этом не может быть достигнута из-за автоколебаний. Автоколебания вызывают появление на выходе релейного усилителя 6 знакопеременных импульсов, которые приводят к дальнейшему росту напряжения на выходе блока 20 коррекции зоны нечувствительности, пока указанная отрицательная обратная связь не уменьшит коэффициент усиления усилителя 7, что эквивалентно расширению зоны нечувств11тельности релейного усилителя 6. Как только автоколебания исчезают, на выходе релейного усилителя 6 исчезают знакопеременные импульсы, а следовательно, напряжение на емкости С 65 начинает уменьшаться по цепи разряда на резистор R 60. При этом коэффициент усилен1ш релейного усилителя 6 вновь увеличивается, пока вновь не появятся автоколебания, Таким образом, стабилизация нагрузки происходит с коэффициентом уснления CAP близким к границе устойчивости, где качественные показател системы наилучшие. При этом дисперсия нагрузки достигает минимума. Уменьшение дисперсии приводит к том что коэффициент вариации нагрузки также уменьшается, что приводит к уменьшению заряда емкости С 61, так как она разряжается на сопротивление R 49. При снижении дисперсии нагрузки ниже заданной величины пороговый элемент 32 переводится в. состояние логического нуля, что вновь восстанавливает цепь заряда емкости С 62, блока коррекции уставки, которая может увеличиваться до уровня, на котором достижима стабилизация с заданным коэффициентом вариации. Если на более высоком уроне стабилизация не достигнута с заданным коэффициентом вариации нагрузки, то на выходе релейного усилителя 6 в какой-то последовательности появляются импульсы наброса +1, а так как датчик 31 пиковых наг рузок при этом находится в состоянии +1, то уставка только уменьшается, что приводит к уменьшению сренего значения нагрузки, а следовательно, и ее дисперсии. Таким образом, номинальная нагрузка, соответствующая уставке при заданном допустимом коэффициенте вариаций, выбирается автоматически. Это обеспечивает независимо от параметров горной машины и крепости ма-чсива 19 максимальную при заданных ограничениях производительность горной машины. Ограничение коэффициента вариации нагрузки обеспечивает к тому же стабилизацию направления бурения.
Если в процессе работы горной машины происходит перегруз электропривода 16 так, что нагрузка становится равной 2-3-кратной от номинальной, то срабатьгаает блок 43 безынерционной защиты и реле 44, которое отключает электропривод сиетемы 17 подачи, при этом подача становится равной нулю. Если нагрузка на исполнительном органе 15 не уменьшается, то блок 45 инерционной защиты с выдержкой времени 1,52,5 с после срабатьшания блока 43 безынерционной защиты отключает электропривод 16.
Если происходит запуск электропривода 16 в работу, то пусковой ток переводит датчик холостого хода в состояние нуль. Однако блок безынерционной защиты при этом не срабатывает, так как емкость С 64 разряжается с постоянной времени, обеспечивающей в этом случае блокировку блока 43 безынерционной защиты еще в течение 1-2 с, что достаточно при нормальном запуске электропривода 16. Если же запуск не состоится, например, при заштыбовке исполнительного органа 15, то через указанное время срабатывает блок 43 безынерционной, а затем и блок 45 инерционной защиты. Это позволяет предотвратить отключение электропривода системы 17 подачи при запуске электропривода 16, следовательно, сократить потери времени на эту операцию, что повьшиет производительность горной машины.
Постоянные времени зарядно-разрядных цепей инерционных блоков выбираются на основании следующих положений. Колебания уставки должны быть с частотой на порядок ниже средней рабочей частоты системы. Этим устраняется ее раскачка по уставке. В той же мере это относится как качественно, так и количественно к параметрам расширения зоны нечувствительности. Принимая рабочую частоту 0,2 Гц, рассчитываем зарядно-разрядные цепи емкостей С 62 и С 65 на частоту среза 0,02 Гц.
При этом постоянную времени наброса уставки выбираем на порядок вьш1е, чем постоянную времени сброса, так как наброс уставки должен успевать следовать за набросом нагрузки, аследовательно, соответствовать ее рабочей частоте. Аналогино и для постоянной времени заряда емкости С 65, так как в противном случае расширение зоны нечувствительности происходит медленно и САР длительное время находится в автоколебательном режиме. Постояная времени разряда емкости С 63 выбирается таким образом, чтобы после запуска электропривода 16, несмотря на наступление холостого хода еще в течении 6-9 с, происходило увеличение подачи горной ма11шины. Если в течении этого времени исполнительньй орган 15 не внедряется в массив 19, то САР переклю-чается в режим холостого хода и уменьшает подачу на 15-30%. Время (6-9 с) определено при испытаниях горных машин с регулятором-нагрузки и является необходимым и достаточным для безударного подвода исполнительного органа 15 к массиву 19. При переводе горной машины из рабочего режима в режим холостого хода в течении 2,5 с пороговьй элемент 38 еще находится в состоянии логического нуля. Это необходимо для ТХ5ГО, чтобы датчик 35 холостого хода не переключался с рабочей частотой из одного положения в другое (из О в 1). Влияние пусковых токов электропривода 16 на датчик 35 холостого хода ограничивается стабилитроном V 74, напряжение его отк. рывания определяет максимальный заряд на емкости С 63 при запуске электропривода 16. При выборе постоянных зарядноразрядных цепей инерционного блока 34 необходимо дополнительно учесть что коэффициент вариации нагрузки не должен превьш1ать 0,2. Так как нагрузка по доказанному соответствует уставке, то на выходе фильтра 2 нижних частот средний уровень нагрузки равен выходному сигналу третьего блока ИЛИ 29, который поступает как уставка на пороговьй элемент 32, поэтому для того, чтобы на втором его входе Вариация нагруз ки до его срабатьшания не превьша- ла величины 0,2 между резисторами R 49 и R 50 должно быть выполнено соотношение: R 49 равно или больше четырех R 50. Постоянная разряда емкости С 61 должна быть такой, что бы на все время необходимое для стабилизации нагрузки пороговый эле мент 32 бьш в состоянии логической единицы. Практика показьюает, что 512 для существующих САР горных машин это время не превьш ает 10 с. При реализации устройства указанная пос- , тоянная времени принималась равной 40 с. При этом обеспечивалась стабилизация нагрузки. Пороговый элемент 46 реализован на диоде V 83, который открывается при достижении входного сигнала с выхода фильтра 2 нижних частот, соответствующего задатчику 47 порога, собранного на резисторах R 79-81, а генератор импульсов реализован на операционном усилителе, имеющем прямой (+) и инверсный (-) входы. Генератор 48 импульсов запускается в работу подачей напряжения. При этом на его выходе появляется сигнал логической единицы. Этот сигнал по цепи отрицательной обратной связи заряжает ёмкость С 82. Когда напряжение на ней достигнет напряжения на выходе задатчи ка 47 порога, на выходе г енератора 48 импульсов устанавливается логический ноль, при этом емкость С 82 разряжается на резистор R 75, пока напряжение на ней не станет ниже напряжения на выходе задатчика порога. Тогда вновь происходит переключение генератора 48 импульсов в состояние логической единицы. При открьгеании диода V 83,.которое происходит, когда уровень входного сигнала с фильтра 2 нижних частот достигает величины 0,3-0,5 от номинальной нагрузки горной машины, увеличивается напряжение на прямом входе операционного усилителя генератора 48 импульсов, что приводит к изменению скважности его импульсов. При срабатьтании датчика 31 пиковых нагрузок сигнал логической единицы поступает на инверсный вкод операционного усилителя и запирает его. При этом на выходе генератора 48 импульсов устанавливается нулевой сигнал.
| Регулятор нагрузки ПРИЗ для проходческих комбайнов и буровых машин | |||
| Руководство по эксплуатации ПРИЗ 00.000 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Релейная система регулирования | 1981 |
|
SU999012A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Регулятор нагрузки горной машины | 1974 |
|
SU581270A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
