В известных балансировочных машинах, в которых балансируемый объект, например, ротор паровой или газовой турбины устанавливается на пружинных опорах, можно по наблюдаемым вибрациям судить лишь о наличии динамической неуравновешенности всей врап1аюш.ейся системы; однако, очень трудно определить, в какую сторону и на какую величину смещен центр тяжести балансируемого объекта относительно его оси враш,ения.
Предлагаемая балансировочная машина позволяет определить как величину, так и направление отклонения центра тяжести частей ротора от оси.
Для этого испытуемый ротор устанавливается в машине на маятниковых подвесках с возможностью вращения ротора подшипником, после чего ему сообщается требуемое .число оборотов соответствующим приводным устройством.
При наличии динамической неуравновешенности ротора маятниковые подвески приходят в колебательное движение, которое регистрируется соответствующими электроизмерительными приборами и световыми указателями, реагирующими как на величину, так и на направление смещения центра тяжести относительно оси в двух плоскостях ротора, совпадающих с плоскостями качания маятниковых подвесок.
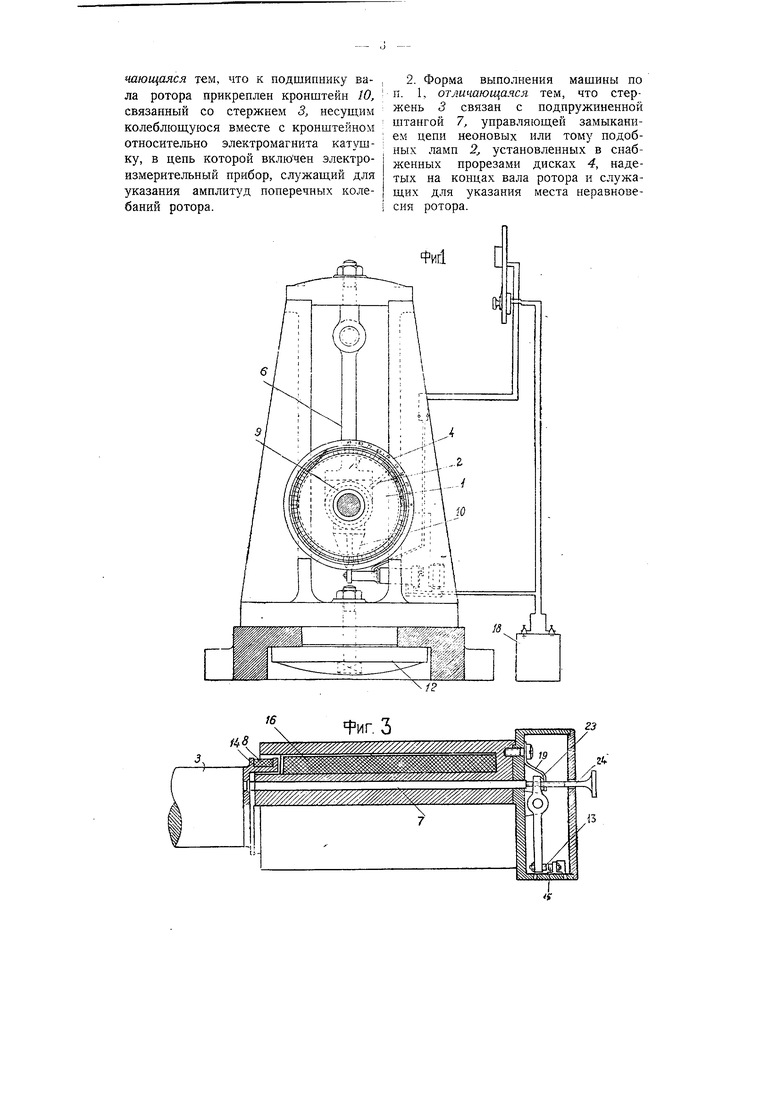
На фиг. 1 и 2 схематического чертежа представлен вид балансировочной машины, составляющей предмет изобретения, с торца ротора, а также вид сбоку - частично в разрезе по оси ротора; на фиг. 3 того же схематического чертежа изображена индукционная катушка в частичном разрезе по оси.
Как видно из фиг. 1 и 2, балансируемый ротор 17 устанавливается в стойках 5 с помощью подвесок 6 так, что он образует маятник и может производить поперечные колебания.
Ротор устанавливается в двух сферических шарикоподшипниках 9 (с обоих концов вала), которые допускают смещение одного конца относительно другого, вследствие чего концы ротора : могут колебаться независимо друг от друга.
Стойки 5 перемещаются на станине так, чтобы можно было балансировать различные роторы (т. е.. больших и малых размеров) и закрепляются на, станине планками 12 и болтами //.
На обоих концах вала надеты из диэлектрического материала диски 1, в которых установлены неоновые лампочки 2, от которых введены концы для контакта с валом и диском 4.
Внизу к подшипникам 9 прикрепляется кронштейн 10, с которым соприкасается стержень 3 (фиг. 3) индукционной катушки.
Двигателем данной машины может служить турбина, так как она может дать различное число оборотов. Турбина 21 (фиг. 2) соединяется с ротором эластичной муфтой 20 так, чтобы колебания ротора не зависели от этого соединения.
На фиг. 3 изображена индукционная катушка с электромагнитом. В сердечнике электромагнита вложена обмотка 16, которая питается от аккумулятора 18 (фиг. 1).
На шпульку 14 намотана обмотка 8, а так как шпулька 14 связана с кронштейном 10 (фиг. 1), как упомянуто выше, то обмотка 8 будет производить такие же колебания, как и ротор.
Штанга 7 перемешается до упора в кронштейн 10 посредством винта 24, которым одновременно регулируется зазор между контактами 13 и 15. Постоянное силовое замыкание между штангой 7 и винтом 24 создается пружиной 19.
Перечисленные детали и узлы машины взаимодействуют при испытании ротора следующим образом.
Испытуемый ротор, в случае если он не уравновешен, приводит в колебательное движение подвески 6 и связанные с ними кронштейны W. Тот угол положения ротора, при котором происходит его максимальное отклонение в горизонтальной плоскости, определяется визуально - с помощью стробоскопа, работающего синхронно с вращением ротора по любой его меридиональной плоскости, например, той, в которой расположена радиальная щель в ди|ске 4, для неоновой лампы 2; последняя вспыхивает, как указано ниже, в момент максимального отклонения ротора и в этот же момент освещается стробоскопом диск 4, по делениям которого может быть определи угол отклонения щели
(неоновой лампы) от вертикальной или горизонтальной плоскости машины.
Кроме того, и без помощи стробоскопа при быстро следующих друг за другом вспышках неоновой лампы последняя будет казаться неподвижно расположенной под некоторым углом к вертикальной плоскости машины.
Стробоскоп необходим только для определения этого угла с помощью делений на вращающемся диске 4.
О величине смещения центра тяжести ротора относительно его оси можно судить по амплитуде колебания подвесок 6.
Вследствие того, что индукционная катушка двигается (поступательновозвратно) синхронно колебаниям ротора в постоянном магнитном поле, то в ней индуктируется переменная электродвижущая сила с частотой, равной числу оборотов. Очевидно, что электродвижущая сила, развиваемая в индукционной катушке, будет прямо пропорциональна величине амплитуды, а так как величина амплитуды будет прямо пропорциональна величине неуравновешенных сил, то вольтметр покажет пропорциональную этой силе величину напряжения индуктируемого тока.
Для питания неоновой лампы в момент максимального отклонения подвесок 6 от вертикали служит спираль Румкорфа, питаемая аккумулятором 18 (фиг. 1) через контакты/5,/5 (фиг. 3) и контактные шины на диске 4.
Штанга 7, двигаясь синхронно с колебаниями ротора, сообщит такое же движение рычагу 2 через винт 24. При этом контакты 13 и 15, к которым подведен ток от аккумулятора, будут размыкаться и замыкаться и тем самым в катушке Румкорфа будет индуктироваться ток высокого напряжения, примерно, 15000-20000 вольт, которым питается неоновая лампа.
Предмет изобретения.
1. Балансировочная машина для динамического уравновешивания роторов, в которой испытуемый ротор подвешивается так, что образует маятник, имеющий возможность совершать поперечные колебания, отличающаяся тем, что к подшипнику вала ротора прикреплен кронштейн 10, связанный со стержнем 3, несущим колеблюш уюся вместе с кронштейном относительно электромагнита катушку, в цепь которой включен электроизмерительный прибор, служаш,ий для указания амплитуд поперечных колебаний ротора.
2. Форма выполнения машины по п. 1, отличающаяся тем, что стержень 3 связан с подпружиненной штангой 7, управляющей замыканием цепи неоновых или тому подобных ламп 2, установленных в снабженных прорезами дисках 4, надетых на концах вала ротора и служащих для указания места неравновесия ротора.
.

| название | год | авторы | номер документа |
|---|---|---|---|
| Балансировочный станок для динамического уравновешивания роторов | 1949 |
|
SU78014A1 |
| Балансировочная машина | 1950 |
|
SU91115A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2009 |
|
RU2441211C2 |
| Способ определения неуравновешенности роторов | 1978 |
|
SU744258A1 |
| ЭЛЕКТРОИСКРОВОЙ ОТМЕТЧИК ДИСБАЛАНСА И ФОРМИРОВАТЕЛЬ ВРЕМЕНИ РАЗРЯДА | 1992 |
|
RU2075736C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Стенд для балансировки изделий | 1979 |
|
SU862012A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2077035C1 |