Известны балансировочные машины для динамического уравновешивания роторов, устанавливаемые на стойках при помош.и подвесок так, что ротор образует маятник и может воспроизводить поперечные колебания.
Отличие предлагаемого станка от подобных машин заключается в определении дисбаланса путем измерения центробежной силы балансируемого ротора по показаниям динамометра, передвигаемого вдоль маятниковой рамы н предназначенного для измерения давления рамы на ограничивающий упор в станине станка и определения минимального усилия, уравнавешиваюш,его центробежную силу вращаюш,егося ротора в плоскости противовеса, что упрощает процесс динамической балансировки.
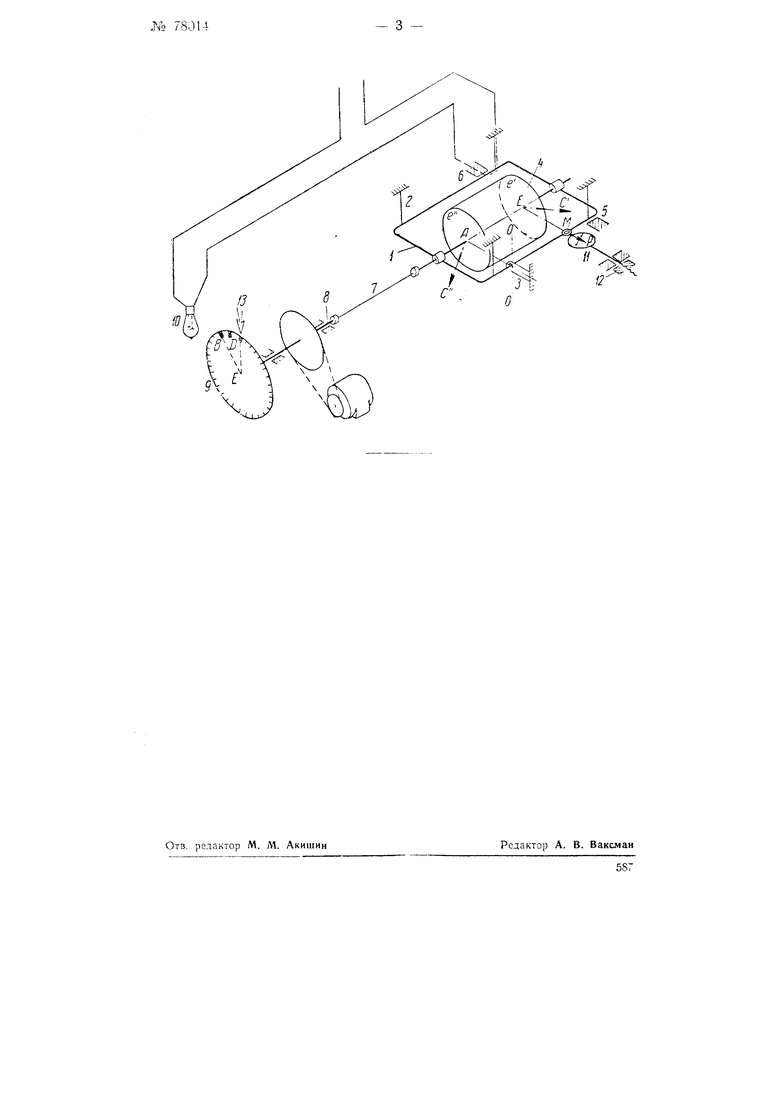
На чертеже изображена схема предлагаемого станка.
Маятниковая рама / подвещена к станине на четырех тонких стальных стержнях 2. Кроме того она может быть связана со станиной тонкой стальной пластинкой 3 против любой точки Л, расположенной на оси ротора. Таким образом, маятниковая рама вместе с помещенным в ее подшипники балансируемым ротором 4 может совершать колебательное движение вокруг оси 00, расположенной в вертикальной плоскости пластины 3. Амплит} да колебания рамы ограничивается жесткими упорами 5 и 5, причем ее линейное перемешение вблизи упора составляет около. 0,2-0,5 мм.
Бала нсируемый ротор 4 связан тонким Стальным стержнем 7 со шпинделем 8, пол ающим движение от электромотора. На шп:инделе закреплен диск 9 с делениями, дающими возможность зат,1ечать угол поворота ротора. Этот диск освещается неоновой лампой 10, которая включается при замыкании контакта в момент касания маятниковой рамой упора 6.
Маятниковая рама пр11тяги;вается к упору 5 специальным динамометром П, дающим возможность определить давление рамы на упор 5. Дпнамометр может быть передвинут вдоль рамы.
Пусть торцы е и е ротора 4 являются плоскостями противовесов. Установив пластину 3 в плоскости е, 1скл очают влияние центробежной силы С на возможные
.-8Г)
перемещения рамы вокруг оси 00. Затем устанавливают динамометр // в плоскости е и при помощи raUKvr 12 притягивают маятпико-вую раму / к упору 5 с некоторой силой Р. После этого приводят во вращение балансируемый ротор 4. Если центробежная сила С мепьще силы Р, то маятниковая рама будет оставаться прижатой к упору 5, в противном случае она начнет отрываться от упора 5 и -периодически касаться упора 6. Изменяя при помощи гайки 12 силу Р, находят такое ее наименьщее значение, при котором маятниковая рама отрывается от упора 5. В этом случае можно считать, что .
Положение противовеса в плоскости е определяется при помощи диска 9. В момент касания маятниковой рамой унора 6 загорается неоновая лампа 10 и освен ает диск 9, который благодаря частым и кратковременным вспышкам лалшы представляется неподвижным. Заметив деление В, находящееся против неподвижной стрелки 13, изменяют направление вращения ротора и снова замечают- деление D, которое находится против той же стрелки 13. После этого останавливают ротор и располагают биссектрису угла BED против стрелки 13. Противовес Б ПЛОСКОСТИ е в этом случае должен лежать на радиусе ЕА1 пересечения плоскости е с горизонтальной плоскостью, проходящей через ось ротора со стороны динамометра.
Аналогичным способом определяются величина и положение противовеса в плоскости е. В этом случае динамометр устанавливает, си в плоскости е, а пластина 3-в плоскости е .
Предмет изобретения
Балансировочный станок для динамического уравновещивания роторов, снабженный закрепленной на подвесах маятниковой рамой для установки ротора и стробоскопом с неоновой или другой подобной лампой для определения угла поворота рогора в процессе балансировки, отличающийся тем, что он снабжен передвигаемой параллельно оси ротора по маятниковой раме и связанной со станиной станка опорной пластиной, предназначенной для осуществления колебательного движения рамы с ротором вокруг оси в вертикальной плоскостл этой пластины, а также перемещае.мым вдоль Маятниковой рамы динанометром с натяжно-й гайкой, предназначенным для измерения величины усилия, уравновещивающего центробежную силу вращающегося ротора, и определения по найденному усилию величины дисбаланса в плоскости противовесов.
d
D5
| название | год | авторы | номер документа |
|---|---|---|---|
| Балансировочная машина для динамического уравновешивания роторов | 1937 |
|
SU56053A1 |
| Устройство для балансировки вращающихся деталей | 1939 |
|
SU58806A1 |
| Устройство для динамической балансировки роторов | 1951 |
|
SU93814A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО СКАНИРОВАНИЯ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2267110C2 |
| ЭЛЕКТРОИСКРОВОЙ ОТМЕТЧИК ДИСБАЛАНСА И ФОРМИРОВАТЕЛЬ ВРЕМЕНИ РАЗРЯДА | 1992 |
|
RU2075736C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2627968C1 |
| Прибор для балансировки вращающихся масс | 1934 |
|
SU45425A1 |
| Способ устранения дисбаланса изделий и устройство для его осуществления | 1947 |
|
SU77777A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 1991 |
|
RU2028590C1 |