столика 2 изделиями коромысло 4 удерживается захватами силового арретира 10.
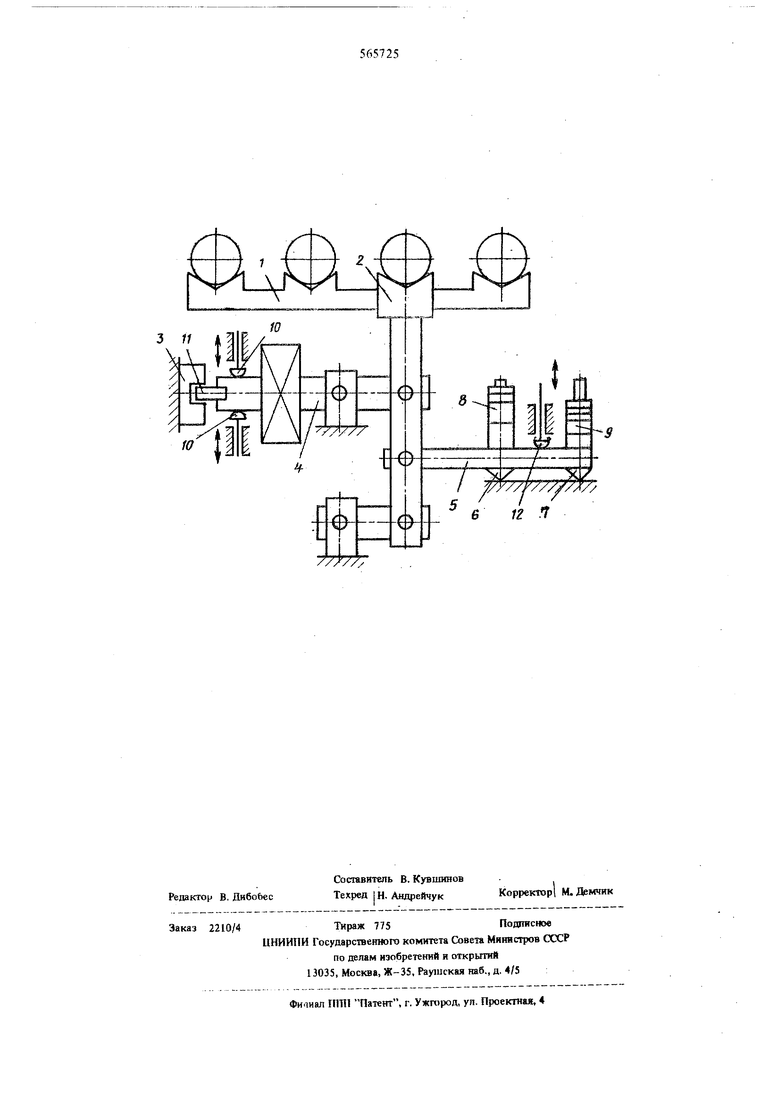
На коромысле укреплен флажок И бесконтактного датчика 3. Весовая система снабжена прижимом 12, периодически взаимодействующим с двухопорным рычагом 5.
В процессе транспортировки и загрузки изделий на приемный столик 2 коромысло 4 удерживается захватами силового арретира 10, при этом двухопорный рычаг 5, вследствие неточностей изготовления и наличия зазоров в шарнирах, опирается, как правило, лишь на одну опору. После установки изделия на приемный столик 2, захваты силового арретира разжимаются, а прижим 12, кратковременно взаимодействуя с двухопорьгым рычагом 5, принудительно устанавливает его на обе опоры 6 и 7. Поскольку рычаг 5 поворачивается при этом на весьма малый угол, зависящий от неточностей срабатывания силового арретира, то усилия, развиваемые прижимом 12, достаточно малы, чтобы обеспечить 1шзкие нагрузки на рычаг 5, являющийся чувствительным элементом весовой системы, и на его опоры 6 и 7. После установки двухопорного рычага на обе опоры прижим 12 освобождает рычаг 5 и связанное с 1шм коромысло 4.
Если вес изделия соотаетствует заданной весовой категории, то коромысло 4 удерживается в исходном положеш1И, противодействующими моментами, создаваемыми тарироврчными грузами 8 и 9.
Если вес изделия, например, больше допустимого, то лротиводейств аощего .момент, создаваемого грузом 9, недостаточно для удерлата1шя коромысла в исходном положении, при зтом коромысло поворачивается на угол, определяемый величиной зазора между коромыслом и разжатыми захватами арретира 10, а двухопар1шш рычаг 5 поворачивается в опоре 6.
Настройка весовой системы ш заданщю весовую категорию осущесгвляется раздельно по верхнему и 1шжнему пределам допуска путем изменения веса тарировочных грузов 8 и 9; например, по верхнему пределу настраивают подбором веса груза 9, при этом изменяется противодействующий момент только относительно опоры 6.
Оси вращения двухопорного рычага 5 в опорах 6 и 7 расположены ниже центра тяжести рычага с тарировочными грузами 8 и 9. При этом малейший поворот рычага в любой из указанных опор вызьшает появление дополнительного момента,
способствующего дальнейшему повороту рычага 5, а вместе с ним и коромысла.
Таким образом, в зависимости от веса изделия коромысло может занимать три фиксированных положения. В процессе контроля измерительный сигнал, зависящий от положения фламска 11 относительно бесконтактного датчика, поступает на исполнительньй : механизм. После контроля захваты силового арретира 10 сжимаются и коромысло принимает горизонтальное положение для приема следующего изделия с конвейера.
Предлагаемое устройство позволяет просто и быстро настроить весовую систему раздельно по верхнему и нижнему пределам допуска на вес контролируемого изделия, и обеспечивает стабильные результаты взвеишвания за счет использования дополнительного прижима, надежно устанавливающего весовую систему в исходное для взвешивания положение .
Формула изобретения .
Устройство для сортировки штучных изделий по весу по авт. св. №469505, отличающеес я ,тем, что, с целью повышения точности сортировки, оно содержит прижим для двухопорного рычага, а тарировочный груз состоит из двух частей, каждая из которых установлена над соответствующей опорой двухопорного рычага.
Истошики информации, принятые во внимание при экспертизе:
1. Авторское свидетельство iN 469605,
кл. В 07 С 5/16,1973.
12 -Т
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки по весу штучных изделий | 1973 |
|
SU469505A1 |
| Устройство для весовой сортировки изделий | 1976 |
|
SU659210A1 |
| Устройство для контроля веса | 1985 |
|
SU1282923A1 |
| Установка для сортировки по весу шарообразных изделий | 1980 |
|
SU910233A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА | 1969 |
|
SU237416A1 |
| АВТОМАТИЧЕСКОЕ ВЕСОВОЕ УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ШТУЧНЫХ, НАПРИМЕР, ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1966 |
|
SU178518A1 |
| АВТОМАТ ДЛЯ СОРТИРОВКИ ПО ВЕСУ СТЕРЖНЕВЫХ ИЗДЕЛИЙ | 1990 |
|
RU2062665C1 |
| Приспособление для сортировки гирь одного наименования | 1926 |
|
SU9910A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛОВЫХ ХАРАКТЕРИСТИК МИКРОДАТЧИКОВ | 1968 |
|
SU211840A1 |
| Устройство весового автоматического дозирования | 1985 |
|
SU1476320A1 |