устройство со смещенными секциями и деформированными упругими элементами.
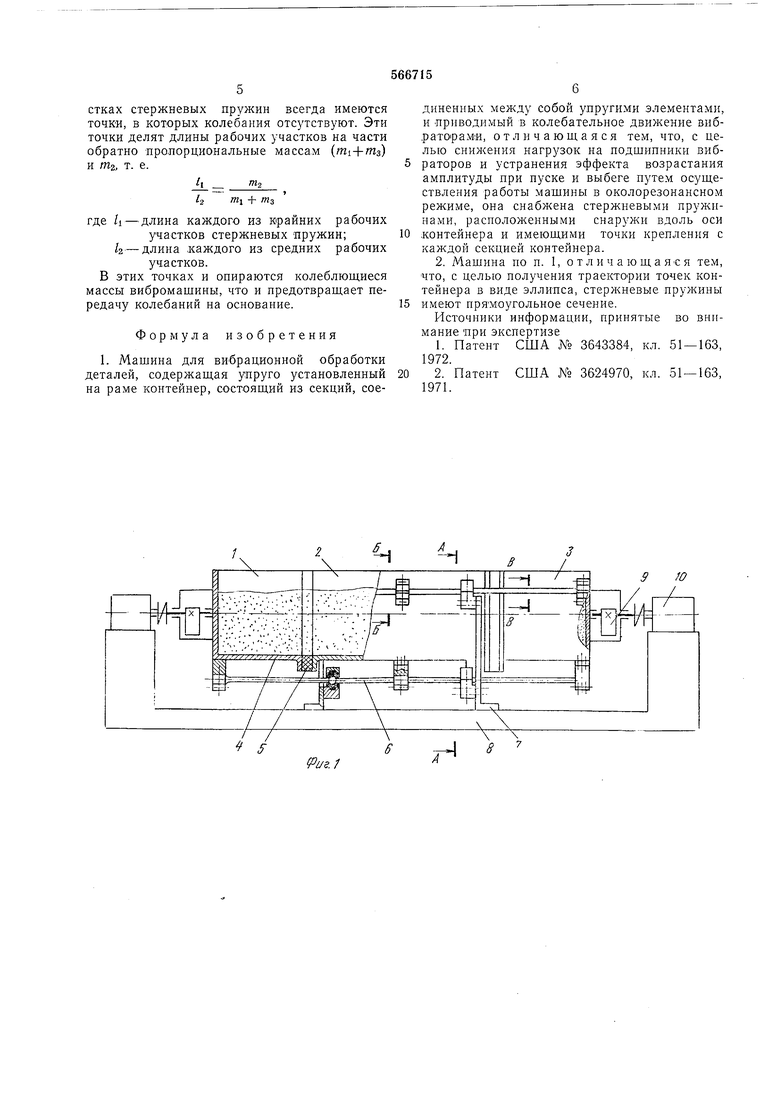
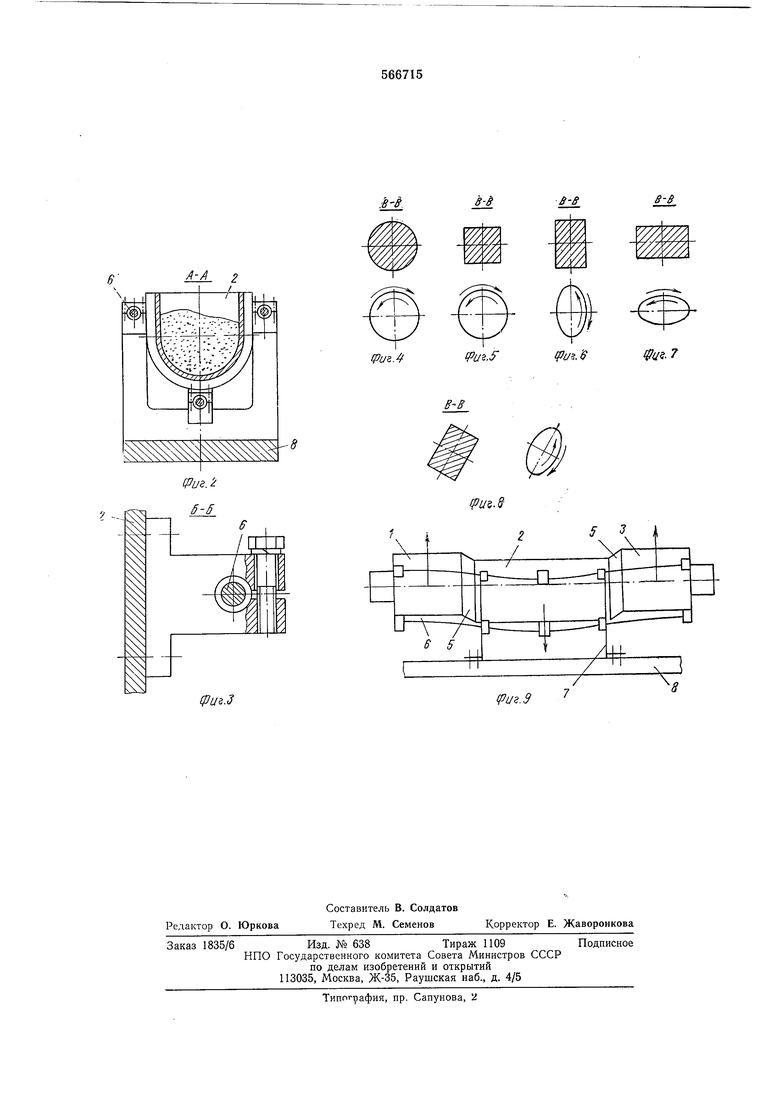
Машина для вибрационной обработки имеет контейнер, который состоит из трех последовательно соединенных между собой секций 1, 2 и 3. Секции имеют фланцы 4, посредством которых присоединяются друг к другу через упругий элемент 5. Кроме того, секции контейнера соединены между собой посредством трех или более стержневых пружин 6, расположенных снаружи контейнера и параллельно его продольной оси. Средняя часть и концы дружин жестко крепятся соответственно на средней 2 и крайних 1 и 3 секциях контейнера. В поперечном сечении стержневые пружины могут быть выполнены различными, например иметь форму круга (см. фиг. 4), квадрата (см. фиг. 5) или прямоугольника, сечение которого может быть расположено вертикально (см. фиг. 6), горизонтально (см. фиг. 7) и наклонно (см. фиг. 8), но одинаково для всех дружин.
Контейнер присоединяется к стойкам 7 через стержневые пружины 6, которые крепятся к стойкам в тех точках своего сечения, где колебания отсутствуют. Стойки устанавливаются на основании 8.
Контейнер приводится в колебательное движение двумя соосно ра-сположенными по торцам контейнера вибраторами 9, каждый из которых приводится во вращение отдельным электродвигателем 10.
Работает мащина следующим .разом.
В контейнер загружаются обрабатывающие тела и обрабатываемые детали. При включении электродвигателя вибраторы приводят в колебательное движение контейнер. Эти колебания передаются загруженным в контейнер телам и деталям, за счет чего и происходит виброОбработка.
Поскольку двигатели и дебалансы вибраторов выполнены одинаковыми и динамически связаны через подвижные части контейнера, то и вращение их происходит синхронно за счет эффекта самосинхронизации. При этом динамические параметры системы подбирают так, чтобы синхронное вращение дебалансов вибратора протекало в одной фазе.
Секции 1, 2 и 3 контейнера образуют трехмассовую колебательную систему, в которой каждая из ма-сс-секций может перемещаться относительно другой в плоскости, нормальной оси контейнера без поворота. При этом плоский упругий элемент 5 работает на сдвиг, а стержневые пружины 6 - на изгиб. Такая трехмассовая система имеет две формы свободных колебаний в поперечных плоскостях и две соответствующие им собственные частоты.
Если массы крайних секций 1 и 3, жесткости элементов 5 и пружин 6 и расстояния между центрами масс секций выполнить одинаковыми, то одна из форм свободных колебаний будет соответствовать поперечному движению крайних масс секций в одной фазе и средней в противофазе к пим. Жесткости
упругих элементов 5, пружин 6 и массы секций 1, 2 и 3 подбирают такими, чтобы собственная круговая частота, соответствующая описанной форме колебаний, была близка уг5 ловой скорости вращения дебалансов или несколько выше ее.
При этом суммарная жесткость упругих элементов 5 и пружин ,6 будет определяться по следующей формуле:
Ссум - (1 + )
ffZj
1 +
mi + /из
где со - угловая скорость синхронного вра5 щения дебалансов;
/HI, т, тз - массы секций 1, 2 и 3; б - малая величина, большая нуля (0,01- 0,10), которая подбирается экспериментально в зависимости от массьг загрузки. 0 В этом случае форма вынужденных колебаний будет близка к форме свободных колебаний.
Размеры стержневых пружин и упругих элементов рассчитываются по известным за5 висимостям, исходя из условий их прочно сти и обеспечения Ссум.
При одинаковой жесткости стержневых пружин во всех направлениях, что имеет место при круглом или квадратном их попереч0 ном сечении, получаем круговую траекторию движения точек секций контейнера.
Если поперечное сечение стержневых пружин выполнить прямоугольным, то в зависимости от его расположения можно получить 5 траекторию в виде эллипса, растянутого горизонтально, вертикально или наклонно.
Так при вертикальном расположении прямоугольного сечения стрежневых пружин суммарная жесткость элементов по вертикали будет больше, чем по горизонтали. Поэтому ори дорезонансной настройке вибромащины вертикальные колебания будут ближе к резонансу, чем горизонтальные.
Таким образом, варьируя соотношения сто5 рон прямоугольного сечения, можно получить эллиптические траектории с различным соотношением осей эллипса. ,
Если массы крайних секций контейнера одинаковы и их суммарная масса равна массе средней секции, то все секции контейнера будут колебаться с одинаковой амплитудой, и условия обработки по всему контейнеру будут одинаковыми.
При одинаковой массе крайних секций, но 5 отличии их суммарной массы от массы средней секции, амплитуды колебаний крайних секций будут одинаковы, но не равны амплитуде средней секции (амплитуды будут обратно пропорциональны соответствующим мас0 сам).
Если в этом случае крайние секции отделить от средней перегородками, то можно получить три контейнера с двумя режимами обработки. В рассмотренных случаях на рабочих участках стержневых пружин всегда имеются точки, в которых колебания отсутствуют. Эти точки делят длины рабочих участков на части обратно пролорциональные массам ( и mz, т. е.
А .«2
/2 mi + тз
где /1-длина каждого из крайних рабочих
участков стержневых пружин; /2-длина .каждого из средних рабочих
участков.
В этих точках и опираются колеблющиеся массы вибромашины, что и предотвращает передачу колебаний на основание.
Формула изобретения
1. Мащина для вибрационной обработки деталей, содержащая упруго установленный на раме контейнер, состоящий из секций, соединенных между собой упругими элементами, и Приводимый в колебательное движение виб.раторамя, отличающаяся тем, что, с целью снижения нагрузок на подшипники вибраторов и устранения эффекта возрастания амплитуды при пуске и выбеге путем осуществления работы машины в околорезонансном режиме, она снабжена стержневыми пружинами, расположенными снаружи вдоль оси
контейнера и имеющими точки крепления с каждой секцией контейнера.
2. Машина но п. 1, отличающаяся тем, ЧТО, с целью получения траектории точек контейнера в виде эллипса, стержневые пружины
имеют нрямоугольное сечение.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 3643384, кл. 51 - 163, 1972.
2. Патент США № 3624970, кл. 51 - 163, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРОХОТ ИНЕРЦИОННЫЙ С ОДНИМ ВАЛОМ | 2021 |
|
RU2788948C1 |
| Устройство для вибрационной обработки деталей | 1986 |
|
SU1373545A1 |
| Резонансная вибромашина | 1975 |
|
SU526495A1 |
| МЕХАНИЧЕСКИЙ ВИБРАЦИОННБ1Й СТЕНД | 1969 |
|
SU243923A1 |
| Машина для вибрационной обработки | 1990 |
|
SU1738612A2 |
| Вибрационная резонансная планетарно-шаровая мельница | 2022 |
|
RU2819319C1 |
| Устройство для вибрационной обработки деталей | 1981 |
|
SU959988A1 |
| СПОСОБ ВИБРОУДАРНОЙ ОБРАБОТКИ ПОВЕРХНОСТЕЙ ТОНКОСТЕННЫХ ДЕТАЛЕЙ | 2007 |
|
RU2342243C2 |
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ МЕХАНИЧЕСКОЙ РАЗВЕРТКИ ПРИ ФОРМИРОВАНИИ ИЗОБРАЖЕНИЯ ПУТЕМ МОДУЛЯЦИИ ДВИЖУЩИХСЯ ИСТОЧНИКОВ СВЕТА | 2005 |
|
RU2378567C2 |
| Способ отделения от рабочей среды крупногабаритных деталей | 1985 |
|
SU1286392A1 |
(puz.3
8-д
ё-в
6-S
lffus.7
ipa., S
Pu.S
(puz.4
BS
/Pus.9
(Риг. 9
