(54) ИДЕНТИФИКАТОР УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Идентификатор возмущающих и управляющих воздействий | 1977 |
|
SU744473A1 |
| Идентификатор возмущающих и управляющих воздействий | 1978 |
|
SU873209A2 |
| Устройство для идентификации нелинейных систем | 1980 |
|
SU960745A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| Самонастраивающаяся система управления | 1986 |
|
SU1418649A1 |
| УСТРОЙСТВО ДЛЯ ПРОГНОЗИРОВАНИЯ ПОСТЕПЕННЫХ ОТКАЗОВ ЭЛЕКТРОННЫХ ПРИБОРОВ | 1971 |
|
SU428361A1 |
| Адаптивный идентификатор | 1989 |
|
SU1647515A1 |
| Устройство для возведения в куб | 1985 |
|
SU1283803A1 |
| Устройство для определения параметров объекта | 1987 |
|
SU1446602A1 |
Изобретение относится к области автоматики и может быть использовано при экспериментальных исследованиях систем автоматического управления и регулирования, а именно, для экспериментального определения управляющих воздействий, прикладьшаемых к объектам управления и регулироBaidiH, а также может быть использовано при организации адаптивного управления, при испытаниях систем управления и при контроле их технического состояния.
Известно устройство для экспериментального определения управляющих воздействий, прикладываемых к объекту управления, содержащее регистратор выходного сигнала и блок репкния интегрального уравнения 1.
Известно устройство для экспериментального (Mipeделения сигналов, действующих на системы автоматического управления и недоступных непосредственным измерениям, состоящее из регистратора процессов функционирования системы, регуляризатора и вычислительного блока 2J.
Однако область применения этих устройств ограничена линейными объектами, системами управления и затратами времени на идентификацию.
Известен идентификатор медленно меняющихся и постоянных составляющих процессов функционирования систем управления, содержащий ключи, первые входы первого и второго ключей соединены с первым входом идентификатора, первый вход третьего ключа подключен к второму входу идентификатора, выходы ключей соединены соответственно с первыми входами блоков памяти, блок сравнения, к первому и второму входам которого подключены соответственно выходы первого и второго блоков памяти, первый делитель напряжения, первый вход и выход которого соединены соответственно с выходом блока сравнения и с входом. второго делителя напряжения 3. Область практического использования этого устройства ограничена условиями непосредственной подачи на вход устройства анализируемого сигнала. В практике экспериментальньж исследований систем автоматического управления, в том числе систем с нелинейными свой, ствами не представляется возможным непосредственное измерение и анализ управляющих воздействий.
Цель изобретения - расщирение области применения идентификатора.
Достигается это за счет дополнительного включения в известный идентификатор индикатора нулеBoro значения скорости движения объекта управления, элемента задержки, квадратора и индикатора срабатывания исполнительного органа объекта управления, выход которого подключен к вторым входам второго и третьего ключей, к первому входу третьего ключа подключен вход индикатора нулевого значения скорости движения объекта управления, выход которого соединен с вторым входом первого ключа и через элемент задеряжи - с вторыми входами блоков памяти, а вьссод третьего блока памяти через квадратор подключен к второму входу первого делителя напряжения.
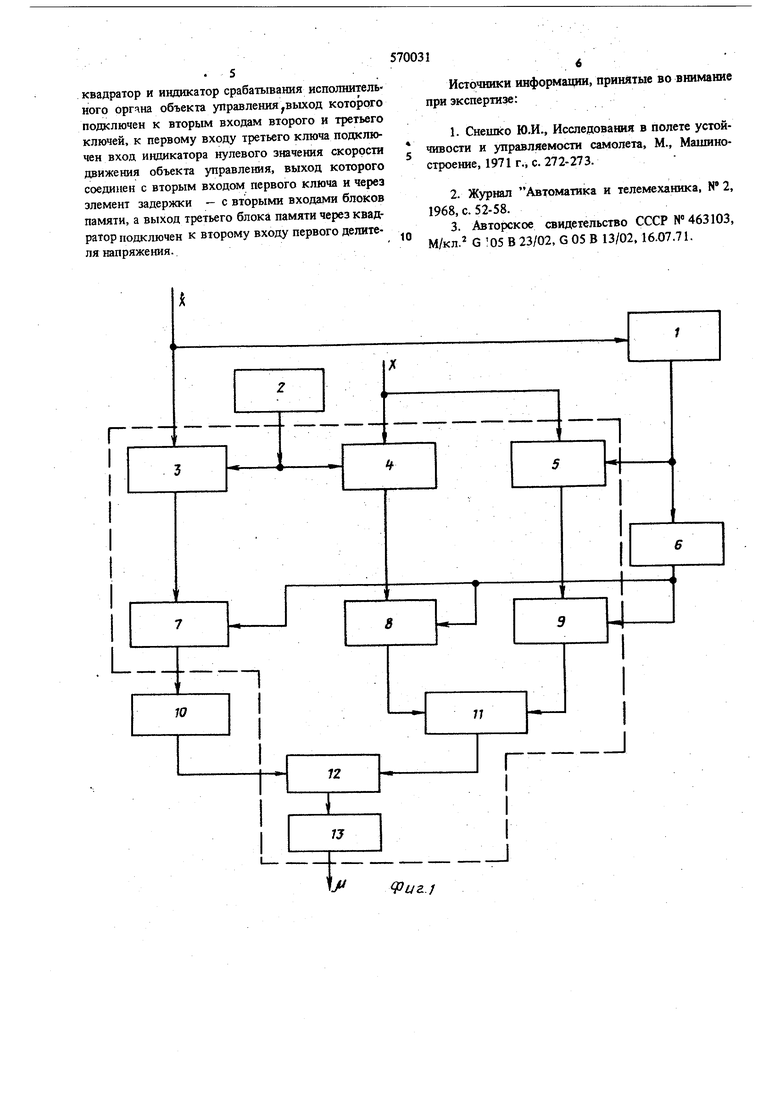
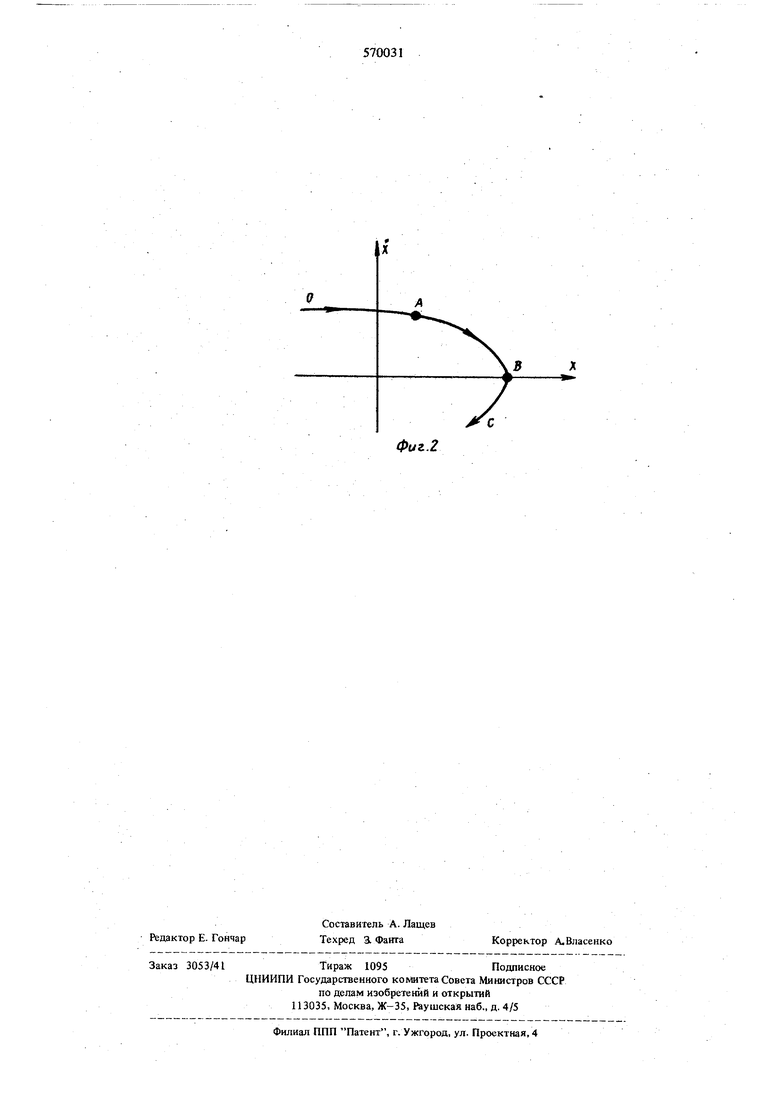
На фиг. 1 дана структурная схема идентификатора; на фиг. 2 - участок фазовой траектории.
Иденти4)икатор содержит индикатор 1 нулевого значения скорости движеш1я объекта управления, индикатор 2 срабатывания исполнительного органа объекта управления, ключи 3,4,5, элемент задержки 6, блоки памяти 7,8,9, квадратор 10, блок сравнения 11, первый делитель шпряжения 12, второй делитель напряжения 13.
В основу разработки идентификатора положены связи между значениями искомого управляющего воздействиях ,прикладц 1ваемого к объекту управления, динамика которого описывается уравнением
/w{x,x),
и значениями фазовых координат движения объекта - скорости X и положения х. Эта связь отражается в уравнении фазовой траектории, имеющим вид
b-x,(2 rVxf-Kf), (i)
где Xi,Xi - начальные, а X2,X2 - конечные значения положения и скорости движения объекта управления;
На фиг. 2 - О-А - участок траектории, на котором выключен исполнительный орган объекта управления;
А -В - С участок траектории, на котором включен исполнительный орган, прикладьшающий управляющее воздействие к объекту управления.
В идентификаторе осуществляется выделение и запомина1ше значений JCi и ;, фазовых координат, с ответствующих моменту срабатывания исполнительного органа (точка А на фиг. 2), и значения х положения объекта, соответствующего нулевому значению скорости объекта (точка В). С выделенными значениями Xi, Xj и xj в блоке вычислений идентификатора осуществляются операции возведения в квадрат, сравнения и деления в соответствии с формулой
Ч
(2)
/ 2(1
,)
Индикатор } предназначен для выдачи сигнала на вход ключа 3 и на элемент задержки 6 при достижении скорости движения объекта управления нулевого значения (точка В). Индикатор 2 выдае1г управляющий сигнал ыа ключи 3,4 при срабатывании исполнительного органа объекта управления.
Блоки памяти 7,8,9 предназначены для запоминания значений Xi, Xi, .к ьоступакнцих с измерителей скорости, и положения объекта управления при открытии 3,4,5. Блоки 10-13 служат для вьшолнения арифметических операщ1Й, предусмотренных формулой (2). На выходе второго делителя напряжения 13 с коэффициентом деления, равным двум, получают сигнал, соответствунндий значению искомого управляющего воздействия )ц.
Идентификатор работает следующим образом. В процессе работы идентификатора при срабатывании исполнительного органа объекта управления на выходе индикатора 2 формируется управляющий сигнал, открывающий ключи 3 и 4, через которые значения скорости Xj и положения л 1, соответствующи точке А на фиг. 2, поступают на блоки памяти 7 и 8. При нулевом значении скорости движения объекта управления (точка В) на выходе индикатора 1 формируется управляющий сигнал, открывающий ключ 5, через который значение отклонения ДС2 объекта управления поступает на блок памяти 9. Через промежуток времени, достаточный для запоминания значения .ic в блоке 9, с выхода элемента задержки 6 поступает сигнал считывания на блоки памяти 7,8,9, с выхода которых сигналы, соответствующие значениям х, Xj, Xj, поступают на квадратор 10 и блок сравнения И, с выходов которых сигнал поступает на первый делитель напряжения 12. Результат деления поступает на вход второго делителя напряже«ия 13, на выходе которого формируется сигнал, соответствующий значению управляющего воздействия ti.
Идентификатор обеспечивает определение значения управляющего воздействия в нелинейных системах за время, соответствукицее участку А-В на фиг. 2 и менъщее половины периода колебания процессов x(t) и x(t), что позволяет использовать его в быстродействующих системах иденти(| икации нелинейных объектов и систем управления.
Формула изобретения
Идентификатор правляющих воздействий, содержащий ключи, первые входы первого и второго ключей соединенъ с первым входом идентификатора, первый вход третьего ключа подключен к второму входу идентификатора, выходы ключей соединены соответственно с первыми входами блоков памяти, блок сравнения, к первому и второму входам которого подключены соответственно выхода первого и второго блоков памяти, первый делитель напряжения, первый вход и выход которого соединены соответственно с выходом блока qjaaiieHHH и с входом второго делителя напряжения, отличающийся тем, что, с целью расширения области применения идентификатора, он содержит индикатор нулевого значения скорости движения объекта управления, элемент задержки.
квадратор и индикатор срабатывания исполнительного органа объекта управления,выход которсзго подключен к вторым входам второго и третьего ключей, к первому входу третьего ключа подключен вход индикатора нулевого значения скорости движения объекта управления, выход которого соединен с вторым входом первого ключа и через элемент задержки - с вторыми входами блоков памяти, а выход третьего блока памяти через квадратор подключен к второму входу первого делителя напряжения.
Источники информации, принятые во внимание при экспертизе:
М/кл. G 05 В 23/02, G 05 В 13/02. 16.07.71.
г/г./
