Изобретение относится к области систем автоматического управления и может быть использовано для стаби- лизации координат широкого класса объектов с переменными параметрами.
Целью изобретения является расширение функциональных возможностей системы путем управления с учетом фазовых ограничений.
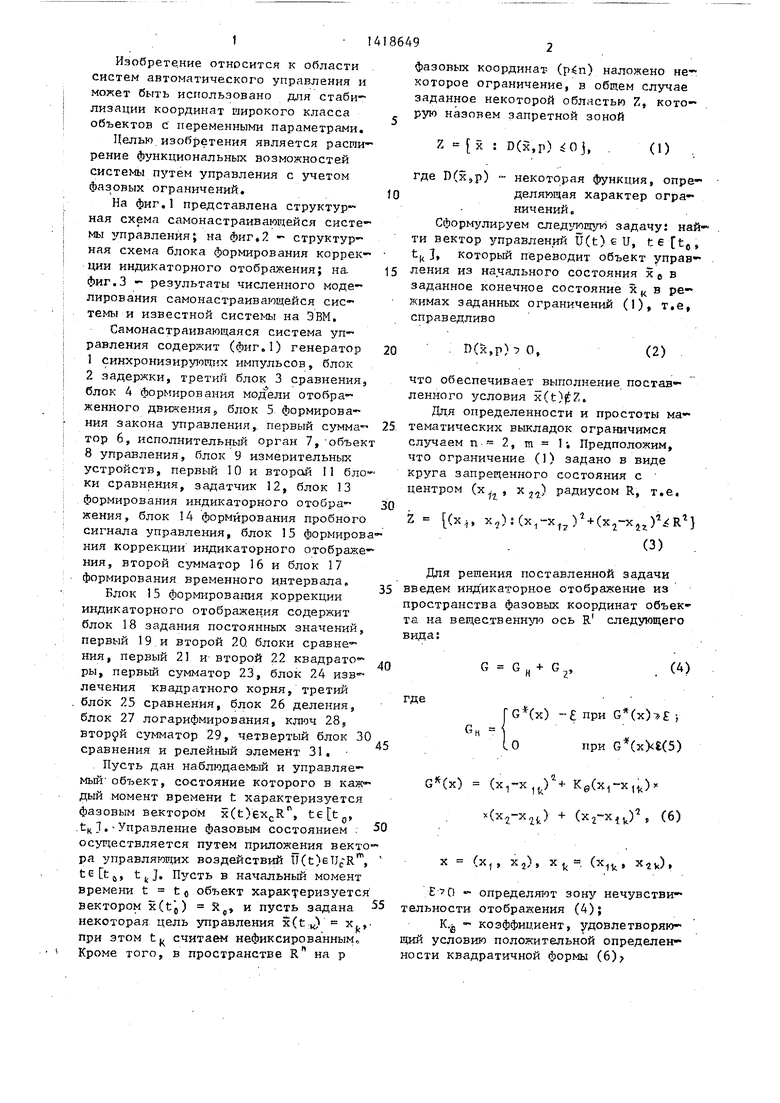
На фиг.1 представлена структурная схема самонастраивающейся системы управления; на фиг,2 - структур-- ная схема блока формирования коррек- ции индикаторного отображения; на фиг.З результаты численного моде- лирования самонастраивающейся системы и известной системы на ЭВМ,
Самонастраивающаяся система управления содержит (фиг.1) генератор
1синхронизирующих импульсов, блок
2задержки, третий блок 3 сравнения, блок 4 формирования модели отображенного движения, блок 5 формирования закона управления,, первый сумма- тор 6, исполнительный орган 7, объект
8 управления, блок 9 измерительных устройств, первый 10 и второй II бло ки сравне.ния, задатчик 12, блок 13 формирования индикаторного отобра жения, блок 14 формирования пробного сигнала управления, блок 15 формирования коррекции индикаторного отображения, второй сумматор 16 и блок 17 формирования временного интервала, БЛОК 15 формировахтоя коррекции индикаторного отображения содержит блок 18 задания постоянных значений, первый 19 и второй 20, блоки сравне- ния, первый 21 и- второй 22 квадрато ры, первый сумматор 23, блок 24 извлечения квадратного корня, третий блок 25 сравнения, блок 26 деления, блок 27 логарифмирования, ключ 28„ второй сумматор 29, четвертый блок 30 сравнения и релейный элемент 31,
. Пусть дан наблюдаемый и управляемый- объект, состояние которого в каждый .момент времени t характеризуется фазовым вектором x(t)6Xj.R, (j, ..- Управление фазовым состоянием - осуществляется путем приложения векто ра управляющих воздействий U(t)eUpR , , . Пусть в начальный момент времени t t о объект характеризуется вектором x(tj) X,, и пусть задана некоторая цель управления x(t; х, при этом t считаем нефиксированным. Кроме того, в пространстве R на р
фазовых координат- (р4п) наложено некоторое ограничение, в общем случае заданное некоторой областью ., которую назовем запретной зоной
Z
X ; где D(x,p)
D(x,p) Oj,
(1)
некоторая функция, определяющая характер ограничений.
Сформулируем след тощуто задачу: ней ти вектор управлений U(t)е U, , t(( 3, который переводит объект управления из начапьного состояния х е в заданное конечное состояние Хц в режимах заданных ограничений (1), т.е, справедливо
D(x,p)7 О,
(2)
что обеспечивает выполнение поставленного условия x(t)jtZ.
Дл.я определенности и простоты математических выкладок ограничимся случаем п - 2, та 1; Предположим, что ограничение (1) задано в виде круга запрещенного состояния с
центром
(к,,,
х„)
радиусом R, т.е,
Х)
(x,-x,)4(x,, (3)
Для рещения поставленной задачи введем индикаторное отображение из пространства фазовьк координат объекта на вещес.твенную ось R следующего вида:
G
GHг
(4)
где
G(x) - при G(x) ;
GH
.0
при G(x)(5)
G (x) (,)+ Ke(,)x
(Xj-Xjt
,)
+ (Xj-xtu),
(6)
(X,,
Xj),
(X
11t
X2k)
E O - определяют зону нечувствительности отображения (4);
K,g - коэффициент, удовлетворяющий УСЛОВИЮ положительной определенности квадратичной формы (6)
G
где
(f О, x и
(7)
, 1 / i} СЛ- задачу можно переформулировать спеду
J. П г Vv3,X, } vX Х
J ЮЩНМ образом: найти управление U(t),,
переводящее объект, описываемый, вы-, г ражением (9), из начального состоя-, ния G J в начало координат 0 0 при условии выполнения требования .(2).
Задачу можно решить, если известен параметр В модели (9). Проинтегриру(R +сГ)-, (8) 10 ем (9) в пределах одного интервала Т,
принимая на этом интервале В, U - const.
Получим
& (х, , х.) (x,-xi ) +(x,j-xiz) 6
f - окрестность запрещенной зоны (3), представляющей собой кольцо с
(7)


| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1986 |
|
SU1383293A1 |
| Самонастраивающаяся система управления | 1984 |
|
SU1171755A1 |
| Система автоматического управления | 1984 |
|
SU1168897A1 |
| Самонастраивающаяся система управления | 1981 |
|
SU1008698A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| Дискретная самонастраивающаяся система | 1979 |
|
SU824139A1 |
| Самонастраивающаяся система управления | 1978 |
|
SU746415A1 |
| Система регулирования | 1979 |
|
SU830294A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |

Изобретение относится к системам автоматического управления и может быть использовано для стабилизации координат широкого класса нестационарных объектов. Целью изобретения является расширение функциональных возможностей системы за счет управления с учетом фазовых ограничений. Самонастраивающаяся система управления, содержащая генератор 1 синхронизирующих импульсов, блок задержки 2, первый 10, второй 11 и третий 3 блоки сравнения, блок 4 формирования модели отображенного движения, блок 5 формирования закона управ ления, первый сумматор 6, исполнительный орган 7, объект,управления 8, блок 9 измерительных устройств, задатчик 12, блок 13 формирования индикаторного отображения, блок 14 формирования пробного сигнала управления и блок 17 формирования временного интервала, дополнительно содержит блок 15 формирования коррекции индикаторного отображения и второй сумматор 16. 1 з.п. ф-лы, 3 ил. с $ сл ОС О) 4 QD
центром (,x,j), внутренним радиуG - G;,.,.U;
где
G G(to + i Т); В. B(to+ i Т);
иU(to + i Т).
сом R и внешним радиусом R+cTC еГ 7 О ), I 5
Функция (4) неотрицательна и имеет единственный минимум на пространстве фазовых координат объекта, равный О и достигаемый в -окрестности точки X.. Б (-окрестности (8) запретной 20 зоны (3) функция (4) монотонно и неограниченно возрастает по мере прибли Кения к внешней границе запретной зоны Z, Последнее прямо следует из анализа слагаемого G в выражении (4), 25 вид которого определяется функцией (7). Так как любому, управлению U(t) соответствует некоторая траектория в фазовом пространстве x(t, U(t)), то в силу выражения (4) тому же управле- 0 1 xaG- GCxCt +iT) - НИК) соответствует траектория на пря-i; , мой (t, U(t)). Назовем ее траекторией отображенного движения и аппроксимируем дифференциальным уравнением вида
Из сделанного допущения точно точной аппроксимации движения моделью (9) следу видное приближенное равенс
(to +(L-1)TJ.
35
Тогда, учитьшая (11) и но записать
G BIJ, G(t,) G S G(t,),
(9)
где В - скалярный коэффициент;
м - индекс, указывающий на то, что (9) есть дифференциальная модель отображенного движения, лишь приближенно описывающая его о Разобьем время процесса ца равные интервалы управления длительностью Т
+ iT,
и, 1, «..
Считаем, что на интервале t + +(i-l)T, tg + iT модель (9) достаточно точно описывает реальную траекторию отображенного движения.
Так как значение Е можно выбрать сколь угодно малым, то поставленную
G;,.,.U;T,
xaG- GCxCt +iT) -
(И)
где
1 ,
G G(to + i Т); В. B(to+ i Т);
xaG- GCxCt +iT)
иU(to + i Т).
xaG- GCxCt +iT)
1 xaG- GCxCt +iT) - ,
Из сделанного допущения о достаточно точной аппроксимации реального движения моделью (9) следует очевидное приближенное равенство
aG- GCxCt +iT) -
(to +(L-1)TJ.
(12)
1 xaG- GCxCt +iT) - ,
Тогда, учитьшая (11) и (12), можно записать
R - i и.т
(13)
дл Таким образом параметр В модели (9) известен. Так как цель управления совпадает с минимумом отображения . (4), то для ее достижения достаточно обеспечить отрицательность производ-
д5 ной G, т.е.
(14)
50
Условие (14) вьтолняется для модели (9) при управлении вида
и
1 + 1
-G;sign(B,),
(15)
При приближении фазовой точки при движении объекта к запретной зоне отображенная координата G неминуемо возрастает, что следует иа описанных свойств функции(4). Это приводит к изменению знака коэффициента В,
что вызывает .изменение знака управления вследствие выражения.(15).
Из последнего утверждения следует, что объект кзненяет движение так, чтобы -прекратить приближение к запретной зоне. Таким образом, представленна4Я задача решена.
Самонастраивающаяся система рабо- тает следующим образом.10
Блок 9 измерительных устройств определяет текущие фазовые координа- ты объ екта 8 и подает их на первые |входы блоков. 10 и 11 сравнения, где они сравниваются с требуемыми конеч- ig |ными значениями, поступающими из 1задатчика 12. Разно сти (х.,-х) и Кх Xjk поступают на входы блока 513,. где происходит преобразование |сигналов согласно выражению (5). Кро- 2о Me того, с выходов блока 9 измеритель- U 1Ных устройств сигналы подаются на |входы блока 15 коррекции отображения, ;которьй осуществляет формирование |сигнала G по выражению (7).
Блок 15 работает следующим образом (фиг.2), Поступившие сигналы |х. и Xj с блока 9 сравниваются в блоках 19 и 20 сравнения с заранее Заданными значениями координат цент- зо ра запретной зоны х..,. и х, посту лающими с первых двух выходов блока 18 констант. Сигналы разностей (х , - X.,,) и (х-,- возводятся в квадрат в блоках 21 и 22 соответственно И затем суммируется в сумматоре 23.
Сумма (х .) 2г хода сумматора 23 поступает на блок 24, где производится извлечение
ми ни
ни вы он ля эл ри
25 з н кл
з 35 н н з
квадратного корня. Полученный сигнал Q жением (7). (Случай х (х,, х,) е z с вых.ода блока 24 следует на первый исключается из рассмотрения). Сигнал вход блока 25 и второй вход блока ЗСЯ Q выхода блока 15 (фиг.1.) склады- на-первый вход которого с выхода вается с сигналом G поступающим с сумматора 29 поступает результат выхода блока 13 с помощью сумматора сложения хранящихся в блоке 18 коне- g 15, тем самым.реализуя выражение (4).
тант величин R и (Г . Блок 30. осуществляет формирование разности сигналов
Значение G; заносится на хранение на время интервала Т в блок 2 задержки
||(х, - i,) + V(Xi - х,) - (R+rf), поступающей затем на релейный элемент 31с, Поступивший на первьш вход блока 25 результат извлечения квадратного корня сравнивается со значением К, поступающим с третьего выхода блока 18 констант. Затем ре- . эультат сравнения поступает на блок 26 деления, на второй вход которого с блока 18 поступает сигнал S, в результате чего на выходе делителя формируется сигнал, описываемый выражением
i (V(x, -х,) + (
LX, -х,
) -R ).
(16)
U
Блок 27 осуществляет логарифмирова- ние выражения (16) и с инвертирующего выхода выдает результат на информационный вход ключа 28. Последний управляется сигналом с выхода релейного элемента 31, который имеет характеристику, описываемую выражением
+ 1.
8х О, Up 0,(17)
вх
(x,-x,,)(x -х,,) -(R +С/ ).
ig 2о U
зо
Таким образом, если фазовая точка (х , X,,) попадает в «Р-окрестность 25 запретной зоны (8), согласно выражению (17) на выходе релейного элемент 31 присутствует потенциал высокого уровня, благодаря чему, на выходе ключа формируется сигнал
-ln{i |(,,)-b(x,-x,/-Rl}
(18)
зо
Если фазовая точка находится вне запретной зоны z и ее rf -окрестности 35 на выходе элемента 31 присутствует нулевой сигнал, а следовательно ключ 28 закрыт. Тем самым блок 15 формирования коррекции осуществляет реализацию сигнала G , описываемого выра-
Значение G; заносится на хранение на время интервала Т в блок 2 задержки
в дискретные м оменты времени
t t,
+ i Т, задаваемые генератором 1 син- хроимпульсов. Сигнал с выхода блока 2 подается на вход блока 3 сравнения, на другой вход которого подает - ся сигнал текущего значения G. с выхода сумматора 16, благодаря чему на выходе блока 3 формируется разность /5G,. Эта разность поступает в блок 4 формирования модели, где совместно с сигналами U. и Т, поступающими с выходов сумматора 6 и
блока 17 временного интервала соответственно, формируется значение параметра модели В в соответствии с (13), Работа блока Д формирования модели происходит дискретно по син.хронизирующим импульсам, поступающим с генератора 1, На основе сигналов G. и Bj в блоке формирования закона управления в моменты времени, задаваемые импульсами генератора 1, формируется сигнал управления (I5)j который через сумматор 6 поступает на исполнит ел bteift орган- 7, осуществляю-- щий непосредственное изменение состояния объекта 8 управления. Блок 14-формирования пробного управления
, формирует некоторый фиксированный сигнал лишь на первом интервале управления для обеспечения возможности идентификации параметра модели отображенного движения в выражении (9) на первом шаге, который используется для формирования сигнала управления на втором интервале управления. Да. лее необходимость в пробном управлеНИИ отпадает, и блок 14 отключается. Деление всего процесса на интервалы вызв;ано тем,что лишь в пределах неболь- шого промежутка времени можно принять
,модель (9), не опасаясь далеко уйти
от реального процесса.
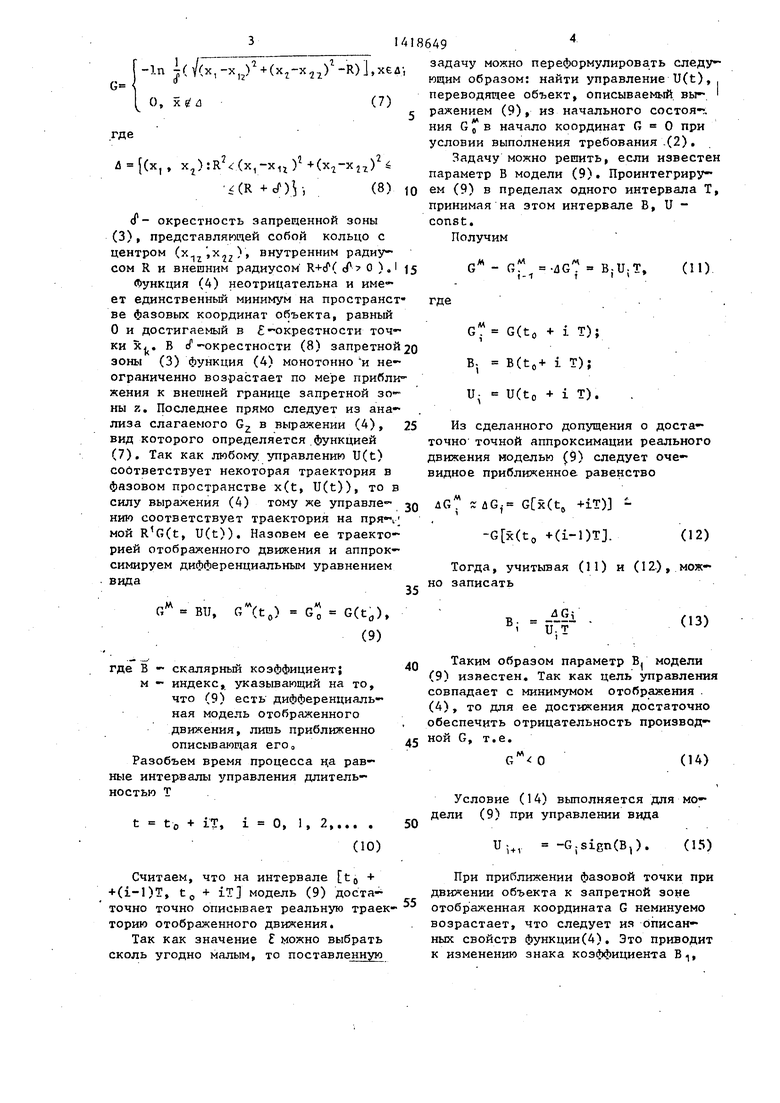
Известная самонастраивающаяся система уп равления не может быть использована в случае, когда на фазовое состояние объекта управления на- ложены ограничения,, что ограничивает функциональные возможности системы и сужает область ее применения, В предлагаемой системе вид индикаторного отображения изменяется в случае приближения фазовой точки (х,,Х2)к запретной зоне Z, так что ото(5ра«ен- ная координата возрастает. Так как закон управления формируется исходя . нз условия (14), то он обеспечивает уход объекта из окрестности недопустимого состояния. На фиг.З представлены фазовая траектория а известной системы, в которой не бьти предусмотрены меры по учету ограничений на фазовые координаты, б - фазовая траектория предлагаемой системы. При приближении к кругу запретного состо- яния с центром С(х,, i) и радиусом R закон (15) обеспечивает управление обьектом с учетом наличия ограничения.
0
5
Это расширяет функциональные возможности системы и увеличивает область ее применения.
Использование предлагаемой системы позволит решить задачу управления объектом в условиях разнообразньпс фазовых ограничений, что расширит функциональные возможностиJэтого класса систем, увеличит область их применения, т,6, принесет положительный эффект.
Формула изобретения
I, Самонастраивающаяся система управления, содержащая генератор синхроимпульсов, связанный с первыми входами блока задержки, блока формирова-.
0 ния временного интервала, блока формирования закона управления и блока формирования пробного сигнала управления, выход блока формирования пробного сигнала управления соединен с пер-
5 вым входом первого сумматора, второй вход которого подключен к выходу бло ка формирования закона управления, а выход первого сумматора связан с первым входом блока формирования модели
Q отображенного движения и через исполнительный орган подключен к входу объекта управления, к выходу которого подключен вхрд блока измерительных устройствS первый и второй выходы которого подключены соответственно к первым входам первого и второго блоков сравнения, вторые входы которых связаны соответственно с первым и вторым выходами задатчика,. а выходы . первого и второго блоков сравнения соответственно подключены к первому и второму входам блока формирования индикаторного отображения, в иход блока задержки связан с первым входом третьего блока сравнения, выход которого подключен к второму , входу блока формирования модели отображенного движения, к третьему входу которого подключен выход блока формирования временного интервала, выход блока формирования модели отображенного движения .соединен с вторым входом блока формирования закона управления, отличающаяся тем, что, с целью расширения функциональных возможностей путем управления с -учетом ре.альных ограничений, в нее дополнительно введены блок формирования коррекции индикаторного отображе5
0
5
0
5
ния и второй сумматор, причем первый и второй входы блока формирования
коррекции индикаторного отображения соединены сортветсвенно с первым и вторым выходами блока измерительных устройств, а выход соединен с входом второго сумматора, вькод которого связан с вторым входом блока задержки, вторым входом третьего блока срав
I нения и третьим входом блока формиро; вания закона управления,,
второй квадраторы, первый и второй
. сумматоры, блок извлечения квадрат - ного корня, блок логарифмирования, ключ и релейный элемент, причем первый и второй входы формирования Kopi- рекции .индикаторного отображения соединены cooTBeTCTBeHHjij c первыми входа ми первого и второго блоков сравнения, I вторые входы которых подключены соответ : ственно к первому и второму выходам блока задания постоянных значений, выход первого блока сравнения под-
Фи,г
5 Q
0
ключен к входу первого квадратора, а вьпсод второго блока сравнения подключен к входу второго квадратора, выходы первого и второго квадраторов подключены соответственно к первому и второму входам первого сумматора, выход которого через блок извлечения квадратного корня подключен к первому входу третьего блока сравнения, второй .вход которого связан с третьим выходом блока постоянных значений и первым входом второго сумматора, выход третьего блока .сравнения подключен к первому входу блока деления, второй вход которого связан с четвер - тым выходом блока постоянных значений и вторым входом второго сумматора, выход блока деления через блок логарифмирования соединен с информацион- ным входом ключа, выход второго сумматора подключен к первому входу четвертого блока сравнения, второй вход которого связан с выходом блока извлечения квадратного корня, а выход четвертого блока сравнения через релейный элемент подключен к управляющему входу ключа, выход ключа соединен с выходом блока формирования коррекции индикаторного отображения, t
X(t.}
Фи.в.З
| Система автоматического управления | 1984 |
|
SU1168897A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
