Изобретение относится к управлению стационарными и нестационарными объ- ктами и может найти применение при 20 проектировании и испытаниях различных систем и объектов.
Цель изобретения - повышение точности идентификатора в условиях неинейности объекта идентификации. 25
Идентификатор реализует адаптивный алгоритм идентификации квадратичных моделей и предназначено для идентификации нелинейных объектов, имеющих выраженную экстремальную характерис- Q тику. Относительно непрерывного объекта идентификации предполагается,
что он описывается квадратичной Формой
y(t)(t)+xT(t)(t)+w(t), (1) 35
где y(t) - скалярный выход объекта; а,Ъ, соответственно скаляр,
(т 1)-й вектор, (гохт)-я матрица неизвестных параметр ров объекта, подлежащих оценке ( в случае, если объект нестационарный, эти параметры являются функцией времени1);45
x(t) - (m+0-й вектор входов объ
екта; w(t) - помеха с ограниченным вто
рым моментомJ t - непрерывное время В соответствие объекту ставится дискретная настраиваемая модель
Уп-Х,,
/апм |0,5ЪТПА
Где h г симметричная
0,5V,, с „., /
положительно определенная матрица оценок параметров
50
м
Q
5
5
0
объекта на (п-1)-й итерации.
На чертеже приведена функциональная схема адаптивного идентификатора для многомерного объекта управления с m входами и одним выходом.
Адаптивный идентификатор содержит объект 1 идентификации с ш входами и одним выходом, первый квадратор 2, первый 3 и второй 4 блоки умножения, первый сумматор 5, третий блок 6 умножения,блок 7 оперативной памяти, второй сумматор 8, третий сумматор 9, второй квадратор 10, четвертый сумматор 11, блок 12 деления, блок 13 опорных напряжений, третий квадратор 14, пятый двухвходовый сумматор 15, пороговый элемент 16, открывающийся, если на его информационный вход пода ется положительный потенциал, и за- датчик 17 требуемого значения параметра точности идентификации,,
Адаптивный идентификатор работает следующим образоМо
Входной сигнал хп подается одновременно на входы объекта 1 идентификации, первого квадратора 2, где определяется вектор х, и группу входов первого блока 3 умножения, а с блока 13 опорных напряжений сигнал, соответствующий единице, поступает на первый вход третьего сумматора 9, в котором вычисляется квадрат нормы расширенного вектора входов | хп||2, и на второй вход первого блока 3 умножения, где определяются значения элементов матрицы х х при kЈJ0 Выходной сигнал уп с выхода объекта 1 идентификации поступает на вход четвертого сумматора 11, а на вход второго сумматора 8 подаются сигналы с выходов третьего блока 6
умножения, который реализует операцию поэлементного умножения коэффициентов матрицы hp., гфи k j, эна чения которых записаны в блоке 7 оператив- ной памяти, на значения сигналов, поступающих с выходов первого блока 3 умножения. В результате операции сум- мирования во втором сумматоре 8 на его выходе появляется сигнал, соответствующий значению квадратичной формы у xhhn.,xfl который подается на инверсный вход четвертого сумматора 11, где вычисляется ошибка идентификации Уд Ј n -yn n.,x n и подается на вход третьего квадратора 14 и вход делимого блока 12 деления, на вход делителя которого поступает сигнал с выхода второго квадратора 10, соответствующий значению 1|хц|1. На первые входы первого сумматора 5 поступают сигналы с блока 7 оперативной памяти, а на вторые входы - сигналы с второго блока 4 умножения, соответствующие значениям элементов матрицы п х„х при , полученные в результате умножения коэффициента tfn |j xnl|4(yn-yn) , значение которого определено в блоке 12 деления,
на значения сигналов, поступающих с выходов первого блока 3 умножения... результате операции суммирования в первом сумматоре 5 на его группе выходов появляется уточненное значение матрицы оценок
В
30 блоках на их выходах появляются следующие сигналы: первый квадратор 2 вектор Xj, первый блок 3
n
h + Zul2flb.D-J2.fl х хт -«llxn||«
а на первой группе выходов - значения элементов матрицы h n при ,которые записываются в блок 7 оперативной памяти.
Значение матрицы оценок п м с вторых выходов первого сумматора 5 подается на информационные входы порогового элемента 16, который может находиться в двух состояниях: Открыто, если на его управляющий вход подается положительный потенциал и Закрыто в противном случае„ Управляющий вход порогового элемента 16 соединен с выходом пятого сумматора 15, в котором происходит сравнение требуемого значения параметра точности идентьфи кации V и квадрата ошибки идентифи кации на n-м шаге V рый поступает на первый вход пятого сумматора 15 с выхода третьего квадратора 14„ В этом случае, если велиумножения значения элементов матрицы XjX при kЈJ, третий сумматор 9 - квадрат
, нормы расширенного вектора входов
|| х ||2. На первые и вторые входы третьего блока 6 умножения подаются значения элементов матриц при соответственно х.х, вычисленные в
4Q первом блоке 3 умножения, и h, записанные в блоке 7 оперативной памяти, а на выходах появляются значения элементов матрицы (х(хУ)0Ь О ири kЈj, где ф - символ скоттова произведе45 ния, которые поступают на вход второго сумматора 8, где вычисляется значение квадратичной формы и подается на инверсный вход четвертого сумматора 11, на первый вход кото50 рого с выхода объекта 1 идентификации поступает выходной сигнал у.
В результате операции суммирования в четвертом сумматоре 11 на его выходе появляется значение ошибки
- , 55 идентификации на первой итерации
ц-(угГУп) кото- V yj-y , y, -x.h0xlT поступающее на
вход третьего квадратора 14 и вход делимого блока 12 деления, на вход делителя которого подается значение
I Ч
чина V не превышает требуемого значения точности V (.0), поро- . говый элемент 16 открывается по уп-
с равляющему входу, а на его выходах, являющихся и первым выходом устройства, появляются оценки Ъ-, удовлетворяющие требуемому показателю точности. В противном случае пороговый элеJQ мент закрыт и на выходе устройства значения оценок п„ не появляются.
В исходном состоянии на выходе блока 13 опорных напряжений единица, в блоке 7 оперативной памяти записаны
15 начальные значения коэффициентов матрицы h0 при kfej, на втором входе пятого сумматора 15 присутствует сигнал, соответствующий требуемому значению точности идентификации, на вы20 ходах всех остальных блоков нули. На первой итерации сигнал х, подается на входы объекта 1 идентификации, входы первого квадратора 2 и первые входы первого блока 3 умножения, на
25 второй вход которого и первый вход третьего сумматора 9 поступает единица с выхода блока 13 опорных напряжений „
В результате вычислений в этих
30 блоках на их выходах появляются следующие сигналы: первый квадратор 2 вектор Xj, первый блок 3
fl , полученное в результате прохождения сигнала ||х(||2 через второй квадратор 10. В выходе блока 12 деления сигнал D(, .,) пода-. ется на второй выход адаптивного идентификатора и первый вход второго блока 4 умножения, где вычисляется его
произведение с каждым элементом матрицы х.х| при k j с выходов первого блока 3 умножения, а результат подается на вторые входы первого сумматора 5, на первые входы которого с блока 7 оперативной памяти поступают значения элементов матрицы h рри
, В результате операции суммирования в первом сумматоре 5 на его вторых выходах появляется уточненное значение матрицы оценок пара-метров на первой итерации
т,
W
yj.-XxhoX.i II
а на первых выходах - значения элементов матрицы h при , которые записываются в блок 7 оперативной памяти.
Кроме того, сигнал V(%(y, -у )2 с выхода третьего квадратора 14, поступает на первый вход пятого сумматора 15, на втором входе которого постоянно присутствует сигнал V , соответствующий требуемому значению точности идентификации. В результате операции вычитания в пятом сумматоре 15 на его выходе появляется сигнал который подается на управляю- порогового элемента 16, Если разность положительна, пороговый элемент 16 открывается, а оценки h,, поступающие с второго выхода первого сумматора 5 на информационные входы порогового элемента 16 проходят на выход устройства. В противном случае (), пороговый элемент 16 закрыт и на выходе устройства сигнал не появляется.
На этом первая итерация работы идентификатора заканчивается. В дальнейшем все итерации происходят аналогично первой по мере поступления новых наблюдений.
Адаптивный идентификатор предназначен для восстановления характеристик экстремальных как стационарных, так и нестационарных (дейфующих) объектов, поэтому работа его не прекращается и продолжается столько времени, сколько требуется дпя уста.
5
0
5
0
35
40
45
50
55
новления закономерностей изучаемого объекта. Если объект квазистационарный, то значения выходных параметров идентификатора (оценки hn) через определенное время устанавливаются и не меняются на участке стационарности. При переходе же от одного участка стационарности к другому, опять происходит уточнение коэффициентов. Поэтому в схеме не предусмотрена процедура останова идентификатора
Достоинством изобретения является малый объем используемой оперативной памяти. Это позволяет отказаться от применения мощных ЭВМ в контуре управления и реализовать идентификатор на сравнительно дешевых средствах микропроцессорной техники
Формула изобретения
Адаптивный идентификатор, содержа- ,щий первый блок умножения, группа входов которого подключена к входам объекта идентификации, а выходы - к первой группе входов второго блока умножения, соединенного выходами с первой группой входов первого сумматора и первой группой входов третьего блока умножения, вторая группа входов которого соединена с выходами блока оперативной памяти, а выходы - с входами второго сумматора, первый квадратор, подключенный входами к входам объекта идентификации, третий и четвертый сумматоры, второй квадратор и блок деления, отличающийся тем, что, с целью повышения точности идентификатора в условиях нелинейности объекта идентификации, в него введены третий квадратор, пятый сумматор, пороговый элемент, блок опорных напряжений, выход которого соединен с входом первого блока умножения и входом третьего сумматора, группой входов подключенного к выходам первого квадратора ,, а выходом через второй квадратор - к входу делителя блока деления, выход которо- го, являющийся выходом адаптивного идентификатора, соединен с входом второго блока умножения, а вход делимого - с выходом четвертого сумматора, соединенного прямым входом с выходом объекта идентификации и инверсным входом - с выходом второго сумматора, первая группа выходов первого сумматора подключена к входам блока оперативной памяти, выходы ко-
9164751510
торого соединены с второй группойк выходу пятого сумматора, первый
входов первого сумматора, вторая труп-вход которого соединен с выходом запа -выходов которого, соединена с ин-датчика требуемого значения параметеЬормационными входами порогового ,ра-точности идентификации, а второй
элемента, выходы которого являютсявход - с выходом третьего квадратогруппрй выходов адаптивного идентифи-ра, вход которого подключен к выходу
катора, а управляющий вход подключенчетвертого сумматора.


| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
| Адаптивный идентификатор | 1984 |
|
SU1136115A1 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Адаптивная система управления | 1982 |
|
SU1071996A1 |
| Адаптивное устройство для идентификации линейных объектов | 1981 |
|
SU957168A1 |
| Адаптивный экстраполятор | 1982 |
|
SU1042031A1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| Адаптивное устройство для идентификации линейных объектов | 1988 |
|
SU1520478A1 |
| Устройство для магнитно-импульсной обработки деталей | 1973 |
|
SU470251A1 |
| Устройство для статистической обработки информации | 1980 |
|
SU942043A1 |
Изобретение относится к управлению стационарными и нестационарными объектами и может найти широкое применение при проектировании и испытаниях различных систем и объектов. Предлагаемый адаптивный идентификатор обеспечивает высокую точность идентификации объектов, имеющих выраженную экстремальную характеристи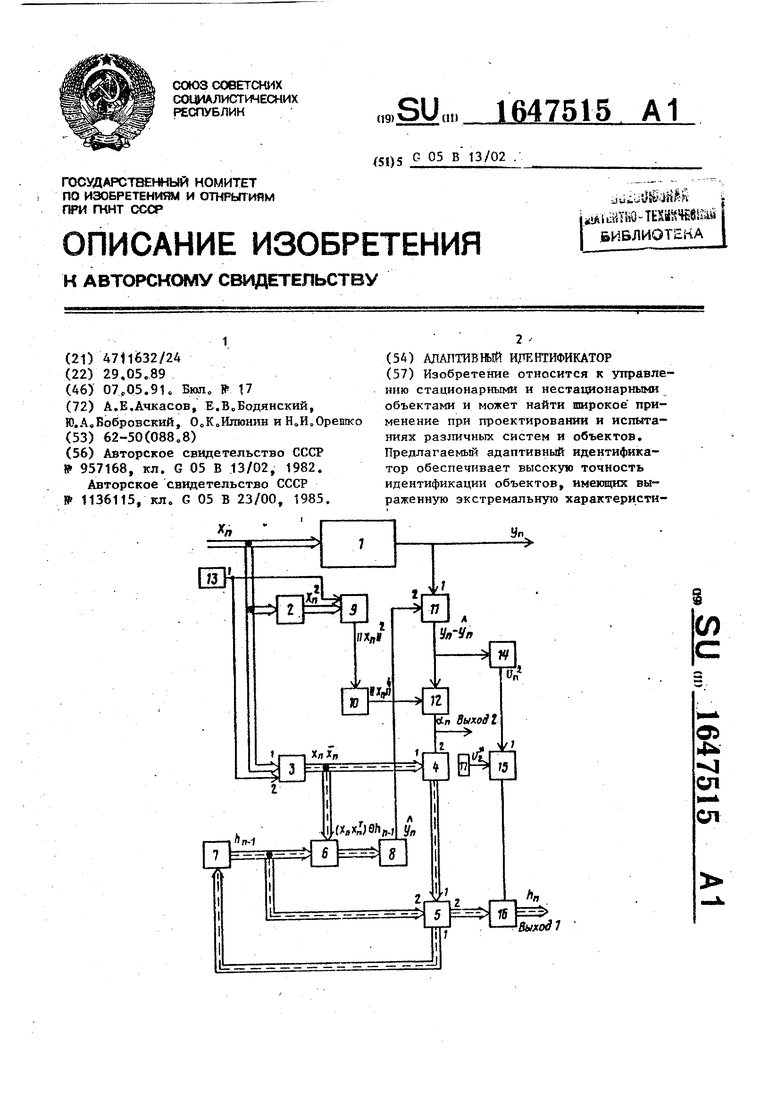

| Адаптивное устройство для идентификации линейных объектов | 1981 |
|
SU957168A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивный идентификатор | 1984 |
|
SU1136115A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
