Изобретение относится к автоматике и может быть использовано при эксп1ериментальных исследованиях систем автоматического управления и регули-. рования, а именно, для экспериментального определения параметров нелинейных систем, а также может быть использовано при организации адаптивного управления, при испытаниях систем управления и при контроле их технического состояния.
Известно устройство для идентификации динамических систем, содержащее генератор пробных синусоидальных сигналов, цепи подстройки двух параметров, интегратора, формирующие звенья и фазовые детекторы 1.
Наиболее близким к изобретению является устройство, содержащее последовательно соединенные индикатор переключения исполнительного органа и первый ключ и последовательно,соединенные блок управления и-вычислитель, входы-которого соединены с выходами соответствующих блоков памяти, вторые выходы блока управления соединены с первыми входами соответствующих блоков памяти, первый, вход первого ключа соединен с первым входом второго ключа, к вторым входам перво о
и второго ключей подключены соответственно выходы датчика перемещения и датчика скорости перемещения 2.
Недостатком устройства является то, что функциональные возможности его ограничены, при его применении необходимо нарушать нормальный режим функционирования идентифицируемой системл и задавать системе последова10тельно различные начальные условия движения в точках фазово)} плоскости вблизи границ областей расположения линий переключения. В условиях нормального функционирования системы
15 использование устройства для пассивной идентификации не представляется возможным.
Цель изобретения - расширение функционсшьных возможностей устрой20ства.
Поставленная цель достигается тем, что идентификатор содержит первые и вторые пороговые элементы, третьи и четвертые ключи и элемент И, выход
25 датчика перемещения через соответствующие последовательно соединенные первый пороговый элемент, элемент И и третий ключ соединен.с первым входом соответствующего блока памяти,
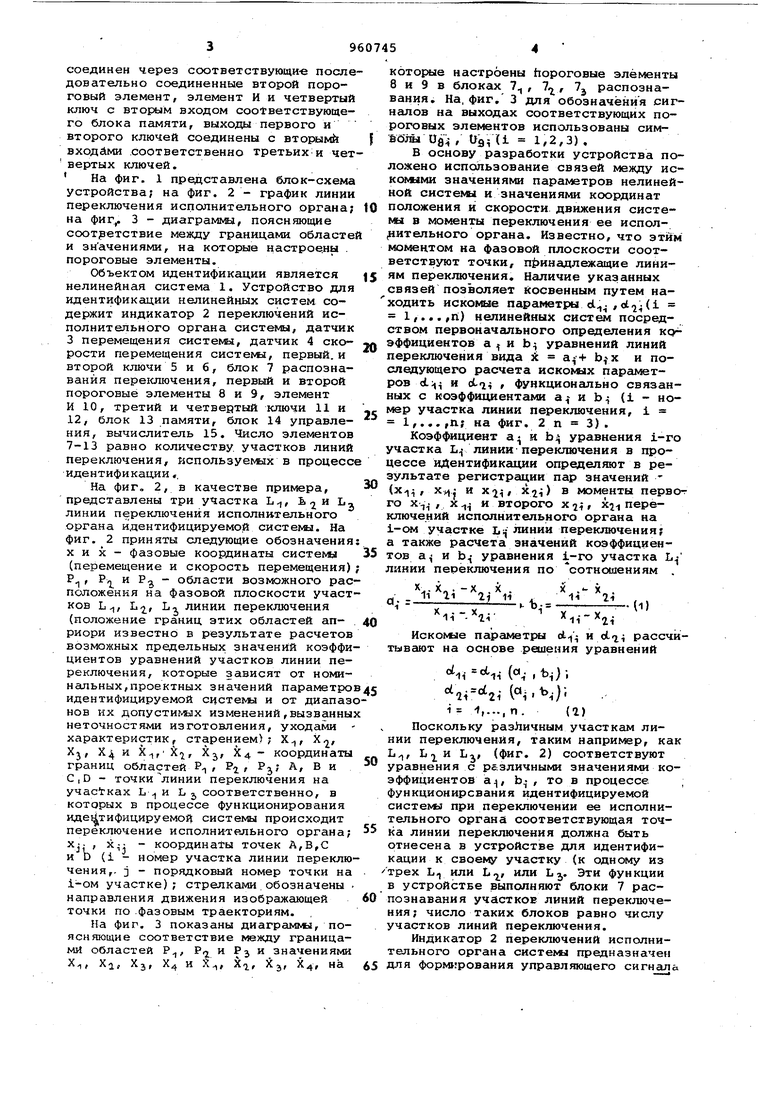
30 выход датчика скорости перемещения соединен через ссютветствующи-е последовательно соединенные второй пороговый элемент, элемент И и четвертый ключ с вторым входом соответствующего блока памяти, выходы первого и второго ключей соединены с вторяым ВХОДАМИ .соответственно третьих-и четвертых ключей, На фиг. 1 представлена блок-схема устройства; на фиг. 2 - график линии переключения исполнительного органа; на фиг 3 - диаграммы, поясняющие соответствие между границами областей и значениями, на которые настрое ны . пороговые элементы. Объектом идентификации является нелинейная система 1. Устройство для идентификации нелинейных систем содержит индикатор 2 переключений исполнительного органа система, датчик 3 перемещения системы, датчик 4 скорости перемещения системл, первый, и второй ключи 5 и 6, блок 7 распознавания перегспючения, первый и второй пороговые элементы 8 и 9, элемент И 10, третий и четвертый ключи 11 и 12, блок 13 памяти, блок 14 управления, вычислитель 15. Число элементов 7-13 равно количеству, участков линий переключения, используемых в процессе идентификации.. На фиг„ 2, в качестве примера, представлены три участка L-,, Ь и L линии переключения исполнительного органа идентифицируемо.й системы. На фиг. 2 приняты следующие обозначения X и X - фазовые координаты система (перемещение и скорость перемещения) Р , Pv и P.J - области возможного расположения на фазовой плоскости участков L, L, L, линии переключения (положение границ этих областей априори известно в результате расчетов возможных предельных: значений коэффициентов уравнений участков линии переключения, которые зависят от номинальных, проектных значений параметро идентифицируемой системы и от диапазо нов их допустиг.«х изменений , вызванны неточностями изготовления, уходами характеристик, старением); Х-,, Х, Xj, Х и Х-,, г, Xj, Х4 координаты границ областей Р. А, в и 1 г C,D - ТОЧКИ линии переключения на участках 1,- и L J соответственно, которых в процессе функционирования иде1|.тифицируемой систекы происходит переключение исполнительного органа; Xj- , X.;: - координаты точек А,В,С и b (i - номер участка линии переклю чения,- j - порядковый номер точки на i-OM участке); стрелками.обозначены . направления движения изображающей точки по -фазовым траекториям. , На фиг. 3 показаны диаграм1 Ы, поясняющие соответствие между границаи РЛ и значениями мй областей Р Х, Х, Xj, Х и Х., XT., Xj, Х4, на KOTojxje настроены Ьороговые элементы 8 и 9 в блоках 7 , 7, 7j распознавания. На, фиг, 3 для обозначения сигналов на выходах соответствующих пороговых элекюнтов использованы симSffjffii Ofl , UaVU 1,2,3) , В основу разработки устройства положено использование связей между искомыми значениями параметров нелинейной системы и значениями координат положения и скорости движения системы в моменты переключения ее испол 1ительяого органа. Известно, что этим моментом на фазовой плоскости соответствуют точки, п)инадлежащие линиям переключения. Наличие указанных связей позволяет косвенным путем находить искомые параметры oL ,,(1 1,...,п) нелинейных систем посредством первоначального определения кс эффициентов а и Ь:; уравнений линий переключения вида а|+ bfX и последующего расчета искомых параметров 1ц и d-i , функционально связанных с коэффициентами а|ИЬ.; {i- номер участка линии переключения, 1 1,.,.,п; на фиг. 2 п 3). Коэффициент а и bj) уравнения i-ro участка Ь линии переключения в процессе иЛентификации определяют в результате регистрации пар значений (х-, , Xv-ij и ) в моменты перво и второго X 2i, xji переключений исполнительного органа на 1-ом участке линии переключения; а также расчета значений коэффициентов а и Ь уравнения i-ro участка L.| линии переключения по сотношениям . NiSi- iHii Sr X . . - Х . . и гл 11 - 1.1 Искомое параметры otYi и oL7i рассчитывают на основе решения уравнений л К .bi); ci,,- l«i.4): 1 /,.... п. Поскольку различным участкам линии переключения, таким например, как (фиг. 2) соответствуют L и L уравнения с р&зличными значенияю коэффициентов а., Ь.; , то в процессе функционирования идентифицируемой система при переключении ее исполнительного органа соответствующая точка линии переключения должна быть отнесена в устройстве для идентификации к своему участку (к одному из Трех L или L, или Lj. Эти функции в устройстве выполняют блоки 7 распознавания участков линий переключения; число таких блоков равно числу участков линий переключения. Индикатор 2 переключений исполнительного органа системы предназначен для формирования управляющего сигнала при срабатывании или отпускании исполнительного органа идентифицируемой нелинейной систе№4 1. Датчик 3 перемещения систекк. и датчик 4 скорости перемещения систе№л осуществля ют формирование сигналов, соответствующих значениям фазовых координат систеи«( и их передачу на входы блоков 7 распознавания участков линий переключения и на входы первого и второго ключей 5, и б. В каждом из блоков 7 распознавания пороговые элементы 8 и 9 предназначены для фор мирования сигналов при попадании изображающей точки в соотйгетствукядую область возможного расположения учас ка линии переключения (области Р , Р и РЗ на фиг. 2). Пороговые элементы 8 и 9 каждого из блоков 7 настроены на входные сигналы, соответствующие Ьраницам областей возможного распо- ложения участков линии переключения, HanpKfJiep, дпя области Р (фиг. 2) в блоке 7-, распознавания пороговый эле мент настроен на входные сигналы, со ответствующие значения Х и Xj координат положения системы, а пороговый элемент 9 настроен на входные сигна лы, соответствующие значениям ){ . и Х скорости перемещения системл. Элемен ты И 10 в блоках 7 распознавания пред назначены для фор1 5ирования управляющего сигнала на третий и четвертый ключи 11 и 12 при попадании значений фазозих коордк1 ат х и х в соответствующую область (Р или РТ, или Pj на фкг. 2)„ Третий и четвертый ключи 11 и 12 Б блоках 7 распознавания осуществляют передачу сигнсшов, соответст вующих значениям фазовых координат идентифицируемой системы а моменты переключения исполнительного органа, в блок 13 памяти. Блок 14 управления формирует сигналЫдля передачи значений , накопленных в блоках 13 памяти, в вычислитель 15, В вычислителе .15 выполняются операции, связанные с рг счетом коэффициентов а и ура нений участков линии переключения и с решением систем уравнений вида (2) Устройство для идентификации нелинейных систем работает следующим образом. При достижении функционирующей идeнTl-Iфицкpye юй системой значений фазовых 4соордикат х х ,, и х х,,(фиг. 2, точка А) происходит переключение исполнительного органа системы Ка выходе индикатора 2 (фиг. 1) формируется сигнал, который поступает на управляющие входы первого и второго г.лючей 5 и 6. Кгаочи 5 и б открываются, и сигналы, соответствующие значениям координат перемещения и скорости перемещения системы, с выходов датчиков 3 и 4 поступают через открытые ключи 5 и 6.на вторые входы третьих и четвертых ключей 11 и 12, соответственно. При этом третий и четвертый ключи 11 и 12 открываются только в том блоке 7 распознавания линий переключения, в котором пороговые элементы 8 и 9 настроены на значения сигнало соответствующих границамтой области фазовой плоскости, которой принадлежит точка переключения исполнительного органа систеьи. Так, для точки А (фиг. 2) открываются третий и четвертый ключи 11 и 12 блока 7 распознавания, так как ице до срабатывания исполнительного органа при попадании изображающей точки в область P-j срабатывают пороговые элементы 8-i и 9-1 (фиг. 3), и на выходе элемента И 10 формируется сигнал, который подается на управляющие входы третьего и четвертого ключей 11 и 12, которае открываются. Через открытые ключи 11 и 12-, сигналы, соответствующие значеВИЯМ координат положения х и скорости перемещения х, поступают на входы блока 13 памяти. После переключения исполнительного органа системы сигнал с выхода индикатора 2 снимается, ключи 5 и б закрываются. .При выходе изображающей точки из области Рх, (фиг. 2) пороговые элемеИты 8 и 9-1 отпускают (фиг. 3) . При входе .изображающей точки в область Pj (фиг. 2) срабатывают пороговые элементы 8 и 92, блока 7 распознавания (фиг. 3) .- При достижении идентифицируемой системой значений фазовых координат Xj и , (фиг. 2) на выходе индикатора 2 формируется сигнал, который открывает первый и второй ключи 5 и б, и сигналы, соответствующие значениям х. и , поступают с выходов датчиков 3 и 4 через ключи 5,6,11-5 и 12 J на входы блока 13s, памяти. При достижении системой значений фазовых координат ,Xi(фиг. 2 .точка В) и , ) (фиг. 2, точка С) устройство для идентификации работает аналогичным образом. Сигналу, соответствующие значениям ч и Хп, запоминаются в блоке 13 памяти, а сигналы, соответствующие , в блоке 13 . Для определения численных значений п араметров идентифицируемой нелинейной системы с блока 14 управления подаются управляющие сигналы на блоки 13 памяти и на вычислитель 15. В вычислителе 15 сигналы, полученные с выходов блоков 13 памяти, преобразуются в соответствии с расчетнЕлм соотношениями (1) и (2), и на выходе устройства получают искомые значения параметров системы d. , d (i l ,.. ,п) . Устройство ,для идентификации нелинейных систем позволяет определять параметры систем в режиме их HOpMaJibного функционирования, что расширяет возможности его применения в автомагазированных и автоматических системах контроля и испытаний. Формула изобретения Устройство для идентификёщии нели нейных систем, содержащее последовательно соединенные индикатор исполнительного органа и первый ключ и по следовательно соединенные блок управлен я и вычислитель, входы которо го срединены с выходами соответствукяци} блоков памяти, вторые выходы блока управления соединены с перилми входами соответствующих блоков па мяти, первый вход первого ключа соединен с первым входом второго ключа, к вторым входам первого и второго ключей подключены соответственно выхопы датчика переме&сения и датчика скорости перемацения, о т ли ч а юц е ее я тем, что, с цепью расширения функционсшьных возможностей уст1./. ройства, оно содержит первые и вторые пороговые элементы, третьи и четЬертые ключи и элемент И, выход датчика перемещения через соответствующие последовательно соединенные первый пороговый элемент, элемент И и третий ключ соединен с первым входом соответствующего блока памяти, выход датчика скорости перемещения соединен через соответствующие последовательно соединенные второй пороговый элемент, элемент И и четвертый ключ с вторым входом соответствующего блока Пс1мяти, выходы первого и второго ключей соединены с входами соответственно третьих и четвертых ключей. Источники инфоЕШации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 432458, кл. G 05 В 13/02, 1972. 2.Авторское свидетельство СССР 638919, кл. G 05 В 13/02, 1978 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для идентификации нелинейных систем | 1976 |
|
SU638919A1 |
| Идентификатор управляющих воздействий | 1976 |
|
SU570031A1 |
| Идентификатор возмущающих и управляющих воздействий | 1977 |
|
SU744473A1 |
| Система регулирования | 1981 |
|
SU954933A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| УСТРОЙСТВО СИНХРОННОГО ПЕРЕМЕЩЕНИЯ ГИДРОЦИЛИНДРОВ РАБОЧЕГО ОРГАНА | 1997 |
|
RU2119597C1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU648946A1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |

Фиг,.1Л4 -
Фиг. г
