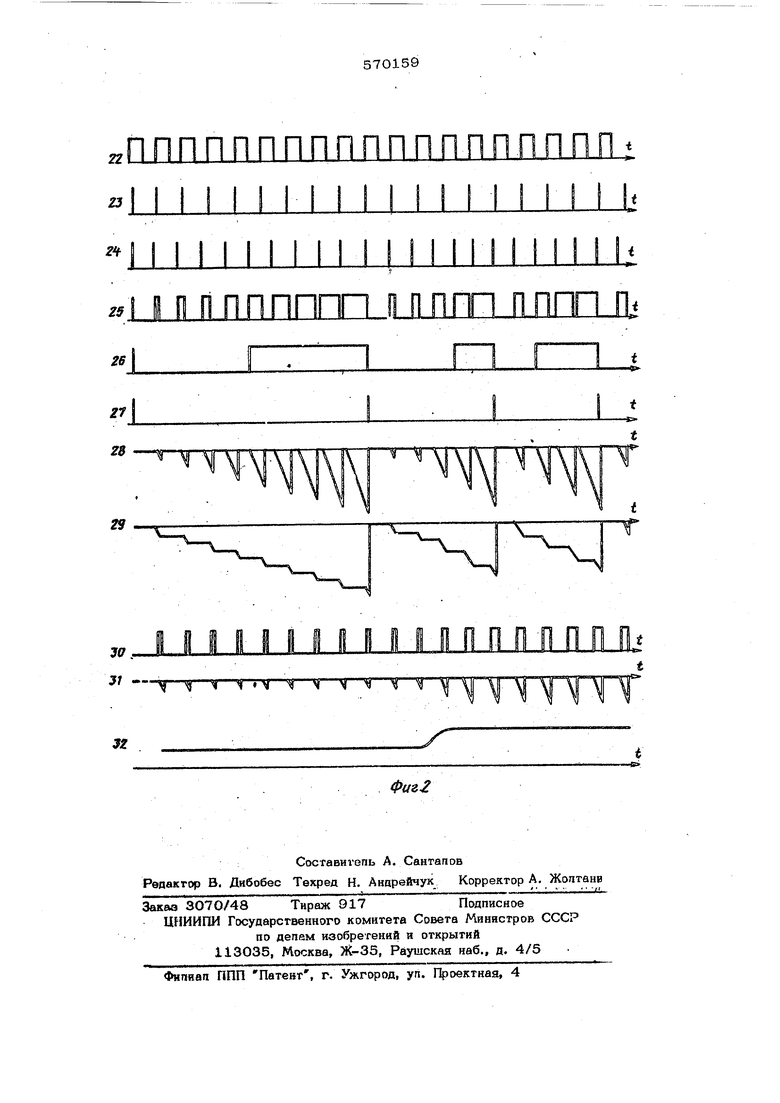
путем регудирования угпа опережения вкию чения ь функции скорости двигатепябез допопнитепьных датчиков на ввпу двигагепя Для этого предпа1: аемый бесконтактный двк-атель снабжен узлом контроля скорости выполненным в виде преобразователя частот-уровень,и управляемым фазовращателем, выпрлненным в виде преобразователя уровень-фаза, причем первый вход узл контроля скорости соединен с выходом датчика, второй вход - с генератором опорной частоты, выход соединен со входом фазовра щателя, выход которого соединен со входом дешифратора. На фиг. 1 дана структурная схема двигателя; на фиг. 2 - временные aaarpaMhCbi работы основных узпов схемы. Электродвигатель содержит коммутатор собственна двигатель 2, датчик 3 с формирователем 4/ трехфазный опорный геяера Тор 5, дешифраторы 6, задающий генератор 7 и схему 8 синхронизации, объединяющую два триггера и две ячейки, управляемый фазовращатель 9, включенный в цепь между датчиком 3 и дешифраторами 6, и узел 10 контроля скорости, включенный между выходами датчика 3 и входом фазовращателя 9. Узел 10 контроля скорости состоит и R-S триггера 11, подключенного одним входом через формирователь 12 коротких импу сов к трехфазному опорному генерагору 5, а другим - к формирователю 4 сигнала дат чика 3. Выход триггера 11 через повторитель 13 подключен на вход первого интегра тора 14, который своим выходом подсоедКнек к операционному усилителю 15. Уси-i литель 15 снабжен формирователем 16 прямоугольных импульсов и фильтром 17, являющимся выходом узла 10 контропя ско рости. Кроме того, схема узла 1О контроля скорости содержит Д-триггер 18, присоединенный своими входами к формирователю 4 сигнала датчика 3 и к опорному генератору 5. Вь1ход триггера 18 через формирователь 19 коротких импульсов и транзисторный ключ 2О соединен со входом второго интегратора 21. Выход последнего соединен со вторым входом операционного усилителя 15, а вход его дополнительно соединён с выходом формирователя 16 прямоугольных импульсов на выхода усилителя 15. Сигнал 22 одного из фазных выходов ге нератора 5 преобразуется формирователем 12 Б короткие импульсы 23, которые вмес те с имп льсами 24 формирователя 4 посту пагбт на входы R и S триггера 11, На, выходе триггера 11 получаетсй последоватепьность,1рлмоугольных импульсов 25 той же частоты, чгэ и импульсы 23, модулируемая по треугольному закону с частотой, являющейся разностью частот импульсов 23 и 24, т. е. с частотой. вращения двигателя 2. В это же время Д-трип р 18 комбинирует (стробопреобразовывает) .импульсы 22 и 24, что дает в результате прямоугольный импульс 26 частоты враще- НИН двигатепя 2, Этот импульс через формирователь 19 коротких импульсов 27 поступает на вход управления ключа 20. Первый интегратор 14 преобразует импульсы 25 в треугольные импульсы 28, амплитуда которых пропорциональна длительности импульсов 25. Второй интегратор 21 включен в цепь локальной обратной связи с выхода формирователя 16 прямоугольных импульсов на неинвертирующий вход усилителя 15 и вырабатывает сигнал 29, являющийся инте1 ралом последовательности выходных импульсов 30 формирователя 16. Усилитель 15 усиливает разность сигналов 28 и 29 (диаграмма 31) и, работаяВ режиме усилвт ния огранячения, преобразует их в прямо- угольные импульсы 30, форма которых дополнительно улучшается формирователем 16, Короткие импульсы 27 посредством ключа 2О периодически с частотой вращения двигателя, 2 быстро обнуляют оба интегратора 14 и 21, после чего цикл преобразований повторяется вновь. Контур, состоящий из двух интеграторов 14 и 21 и усилителя 15, является схемой получения частичных разностей (диокретнрго дифференцирования) межлу любым импульсом 28 и ему предшествующим им- пульсом,; поскольку интегратор 21 включен в обратную связь схемы. При этом разность прямого импульса 28 и сигнала 29 обратной связи на выходе усилителя 15 получает ся непосредственным алгебраическим суммированием обоих сигналов {диаграмма 31), посколь-.у в импульсе 28 треугольной формы длительность и амплитуда связаны постоянным соотношением. Так как ширина импульсов 28 пропорциональна значению угловой координаты двигателя 2, то производная этого сигнала 30 по своей ширине пргторциональ па скорости вращения двигателя 2, что и требуется. Кривая 32 соответствует скорости вращения двигателя 2, которая преобразуется узлом 10 в последовательность имп пульсов ЗО. Таким образом осуществляется безынерционное (с запаздыванием только на один период по несущей частоте) преобразование скорость-уровень, которое и используэт ся для регулирования угла опережения вклю-. чения, Это позволяет повысить экономичиость двигателя и его использование по электромагнитному моменту. Формула обретения Бесконтактный эпектродвигагепь постоянгного тока по авт. св. № 327552, о т п нчающийся тем, что, с цепью повышения энергетических показателей, он снабжен допопнитепьно узлом контропя скорости, выпопненным в виде преобразователя сумма 570 9 шстот-уровень, управпяемымфазоврашагепем, выпопненным в виде преобр.аз она топя уровень-фаза, причем первый вход узпа контропя скорости соединен с выходом датчика, второй вход - с генератором опорной частоты, выход соединен со входом фазовращатепя, выход которого соединен со входом дешифратора.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля центробежного маслоочистителя | 1989 |
|
SU1617316A1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2526500C1 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ | 1992 |
|
RU2018861C1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Скважинный инклинометр | 1967 |
|
SU462019A1 |
| Устройство для вычисления статического момента вентильного электропривода | 1979 |
|
SU947880A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1121691A1 |
| УСТРОЙСТВО ПОЖАРНОЙ СИГНАЛИЗАЦИИ | 1989 |
|
RU2024062C1 |
| Устройство для измерения средней скорости изменения частоты и линейности модуляционных характеристик частотно-модулированных генераторов | 1986 |
|
SU1370585A2 |
ппппппппппппппплппп
и
23
1 I I I I I I I I I I I I I I I I I I и I « z, I П П ПППППП П П ППП П ППП п.
21
ZS
29
31 -
Л}ХУ11 ММЧМ
Ml
