Изобретение относится к радиотехнике и может быть использовано в радиоэлектронных системах, в частности в радионавигационных и радиолокационных системах.
Целью изобретения является повышение точности измерения дальности.
На чертеже представлена функциональная схема комплексного измерителя дальности.
Комплексный измеритель дальности содержит синхронный детектор 1, временной дискриминатор 2, первый усилитель 3, первый сумматор 4, первый фильтр 5 нижних частот, второй сумматор 6, первый интегратор 7, третий сумматор 8, второй интегратор 9, первый формирователь 10 импульса, формирователь 11 следящих стробов, генератор 12 опорных колебаний, умножитель 13 частоты, регулируемый фазовращатель 14, второй усилитель 15, третий усилитель 16, датчик скорости 17, блок 18 оценки скорости, датчик 19 ускорения, блок 20 оценки ускорения, первый ключ 21, фазовый детектор 22, четвертый усилитель 23, четвертый сумматор 24, третий интегратор 25, фазовращатель 26 на 90o, пятый усилитель 27, шестой усилитель 28, второй ключ 29, генератор 30 счетных импульсов, первый триггер 31, второй триггер 32, блок совпадения 33, преобразователь 34 код-напряжение, второй формирователь 35 импульса, третий триггер 36, первый переключатель 37, второй переключатель 38.
Комплексный измеритель дальности работает следующим образом.
Входной радиосигнал, содержащий информацию о дальности до цели, и сигнал с выхода генератора 12 опорного колебания через умножитель 13 частоты и регулируемый фазовращатель 14 поступают на синхронный детектор 1. Выходное напряжение синхронного детектора 1 в виде видеоимпульса подается на временной дискриминатор 2, на который также с выхода формирователя 11 следящих стробов поступают следящие импульсы, соответствующие раннему и позднему стробам, ось симметрии которых соответствует ожидаемой симметрии импульса от цели. Временной дискриминатор 2 формирует напряжение, пропорциональное отклонению оси видеоимпульса относительно оси симметрии следящих стробов. Постоянное выходное напряжение временного дискриминатора 2 подается на вторые входы блока 18 оценки скорости, блока 20 оценки ускорения и через усилитель 3 на первый вход сумматора 4, на второй и третий входы которого с первых выходов соответственно блока 18 оценки скорости, блока 20 оценки ускорения поступают корректирующие напряжения.
На первый инверсный вход сумматора 4 подается с четвертого выхода блока 18 оценки скорости компенсирующее напряжение, пропорциональное скорости изменения флуктуационной дальномерной составляющей путевой скорости. Напряжение с выхода четвертого сумматора 4 через первый фильтр 5 нижних частот подается на третий вход блока 20 оценки ускорения и первый вход сумматора 6, на второй, третий и четвертый входы которого поступают корректирующие напряжения соответственно через усилитель 15 с выхода временного дискриминатора 2 и вторых выходов блока 18 оценки скорости, блока 20 оценки ускорения. Напряжение с выхода сумматора 6 подается на вход первого интегратора 7, с выхода которого снимается напряжение, пропорциональное скорости изменения дальности до цели, и подается на третий вход блока 18 оценки скорости и на первый вход сумматора 8. На второй, третий и четвертый входы сумматора 8 с выходов усилителя 16 и с третьих выходов блока 18 оценки скорости, блока 20 оценки ускорения подаются корректирующие напряжения. Напряжение с выхода сумматора 8 подается на интегратор 9 с выхода которого через ключ 35 снимается напряжение, пропорциональное измеряемой дальности до цели.
Выходное напряжение с интегратора 9 воздействует на формирователь 10 импульса, выходной импульс которого через переключатель 38 подается на формирователь 11 следящих стробов, где осуществляется формирование двух следящих импульсов, соответствующих раннему и позднему стробам, оси симметрии импульса радиоканала от цели. Выходным импульсом формирователя 10 импульса замыкается первый ключ 21, на вход которого поступает входной радиосигнал. С выхода ключа 21 радиосигнал подается на вход фазового детектора 22, на другой вход которого подается опорный сигнал с выхода фазовращателя 26, осуществляюще- го поворот фазы на  сигнала, снимаемого с выхода регулируемого фазовращателя 14. Выходное напряжение фазового детектора 22, величина которого определяется фазовым рассогласованием между сигналами, поступающими на него после соответствующего усиления в усилителе 28, подается на инверсный вход сумматора 4. На первый вход сумматора 24 через усилитель 27 с выхода временного дискриминатора подается корректирующее напряжение.
сигнала, снимаемого с выхода регулируемого фазовращателя 14. Выходное напряжение фазового детектора 22, величина которого определяется фазовым рассогласованием между сигналами, поступающими на него после соответствующего усиления в усилителе 28, подается на инверсный вход сумматора 4. На первый вход сумматора 24 через усилитель 27 с выхода временного дискриминатора подается корректирующее напряжение.
На второй вход сумматора 24 через усилитель 27 с выхода временного дискриминатора подается корректирующее напряжение. На второй вход сумматора 24 через усилитель 23 подается напряжение с выхода фазового детектора 22. Напряжение с выхода сумматора 24 подается на интегратор 25, выходное напряжение которого пропорционально оценочному значению фазы принимаемого радиосигнала, это напряжение в регулируемом фазовращателе 14 используется для фазовой подстройки опорного радиосигнала. В качестве входных сигналов блока 18 оценки скорости и блока 20 оценки ускорения используются соответственно сигналы с выходов датчика скорости 17 и датчика ускорения 19. Кроме того, выходным импульсом формирователя 10 импульса переводится в состояние "0" третий триггер 35 и замыкается второй ключ 29, который осуществляет стробирование по дальности лазерного канала, что обеспечивает повышение отношения сигнал/шум и соответственно повышение точности измерения дальности до цели. Входной лазерный видеоимпульс, содержащий информацию о дальности до цели, проходит через второй ключ 29 и переводит триггер 31 в состояние "0", который был до этого переведен в состояние "1" зондирующим лазерным импульсом.
Напряжение с выхода первого триггера 31 подается на блок совпадения 33 и разрешает прохождение через блок совпадения 33 импульсов с генератора 30 счетных импульсов, эти импульсы подаются на вход преобразователя 34 код-напряжение который преобразует их в напряжение, пропорциональное измеряемой дальности. Далее это напряжение с выхода преобразователя 34 код-напряжение подается на вход формирователя 35 импульса. С выхода формирователя 35 сформированный импульс через второй переключатель 38 подается на вход формирователя 11 следящих стробов, где осуществляется формирование двух следящих импульсов, соответствующих раннему и позднему стробам, ось симметрии которых соответствует оси симметрии импульса от цели лазерного канала, что позволяет осуществить точную подстройку оси симметрии стробов.
Напряжение с выхода триггера 32 осуществляет управление вторым переключателем 38. Второй триггер 32 устанавливается в состояние "1" опорным лазерным импульсом и в это время второй переключатель 38 соединяет выход формирователя 35 импульса с входом формирователя 11 следящих стробов, затем второй триггер 32 устанавливается в состояние "0" задним фронтом импульса с формирователя 35 импульсов, прошедшего через второй переключатель 38, и теперь второй переключатель 38 соединяет выход формирователя 10 импульса со входом формирователя 11 следящих стробов. Напряжение с выхода третьего триггера 36 осуществляет управление первым переключателем 37. Третий триггер 36 устанавливается в состояние "1" задним фронтом импульса с выхода формирователя 35 импульса, и в это время первый переключатель 37 соединяет выход преобразователя 34 код-напряжение с выходом первого переключателя 37. Третий триггер 36 устанавливается в состояние "0" передним фронтом импульса с выхода формирователя 10 импульса и теперь первый переключатель 37 соединяет выход интегратора 9 с выходом первого переключателя 37. Измеряемое значение дальности снимается с выхода первого переключателя 37.
Таким образом во время измерения дальности лазерным каналом измеренное значение дальности снимается с лазерного канала, а в остальное время с радиоканала. Получается избыточная информация, что позволяет повысить точность измерения дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексный измеритель дальности | 1986 |
|
SU1396103A1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2022297C1 |
| Бортовая комплексная система измерения дальности и азимута | 1987 |
|
SU1529951A1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 1988 |
|
RU2144202C1 |
| Стробоскопический преобразователь | 1990 |
|
SU1721522A1 |
| Система измерения азимута летательного аппарата относительно радиомаяка | 1984 |
|
SU1181398A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
Использование: в радиолокационных системах. Сущность изобретения: измеритель дальности содержит один синхронный детектор 1, временный дискриминатор 2, шесть усилителей 3, 15, 16, 23, 27, 28, четыре сумматора 4, 6, 8, 24, фильтр нижних частот 5, три интегратора 7, 9, 25, два формирователя импульса 10, 35, формирователь следящих стробов 11, генератор опорных колебаний, умножитель частоты 13, регулируемымй фазовращатель 14, датчик скорости 17, блок оценки скорости 18, датчик ускорения 19, блок оценки ускорения 20, два ключа 21, 29, фазовый детектор 22, фазовращатель на 90° 26, генератор счетных импульсов 30, три триггера 31, 32, 36, блок совпадения 33, преобразователь код-напряжение 34, два переключателя 37, 38, что позволяет за счет избыточности информации повысить точность измерения дальности. 1 - 2 - 3 - 4 - 5 - 6 - 7 - 8 - 9 - 10 - 38 - 11 - 2, 2 - 15 - 6, 21 - 22 - 23 - 24 - 25 - 14 - 26 - 22, 12 - 13 - 14, 22 - 28 - 4, 2 - 27 - 24, 2 - 27 - 24, 2 - 16 - 8, 29 - 31 - 33 - 34 - 35 - 36 - 37, 30 - 33, 32 - 36, 38 - 32, 36 - 29, 17 - 18 - 4, 18 - 6, 18 - 8, 7 - 18, 19 - 20 - 4, 20-6, 20 - 8, 13 - 20, 5 - 20, 2 - 20. 1 ил.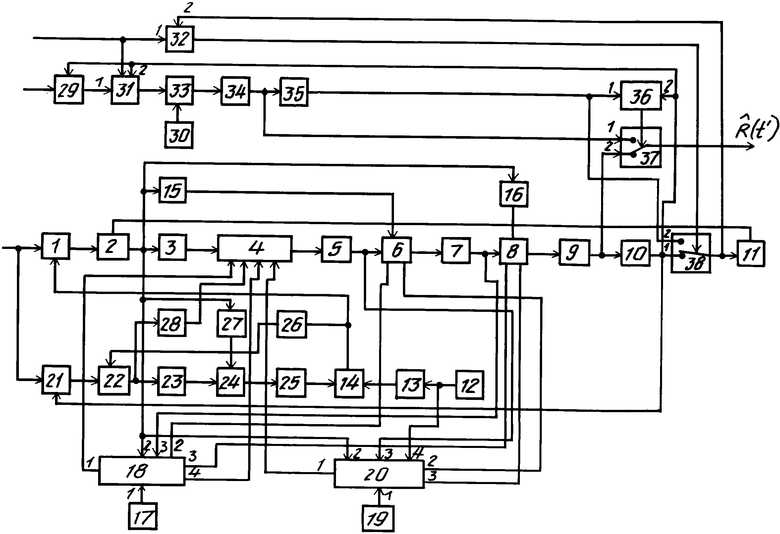
КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ, содержащий последовательно соединенные синхронный детектор, временной дискриминатор, первый усилитель, первый сумматор, первый фильтр нижних частот, второй сумматор, первый интегратор, третий сумматор, второй интегратор, первый формирователь импульса и формирователь следящих стробов, выход которого соединен с опорным входом временного дискриминатора, последовательно соединенные генератор опорных колебаний, умножитель частоты и управляемый фазовращатель, выход которого соединен с опорным входом синхронного детектора, второй и третий усилители, входы которых соединены с выходом временного дискриминатора, выход второго усилителя соединен с вторым входом второго сумматора, выход третьего усилителя соединен с вторым входом третьего сумматора, последовательно соединенные датчик скорости и блок оценки скорости, последовательно соединенные датчик ускорения и блок оценки ускорения, вторые входы блока оценки ускорения и блока оценки скорости соединены с выходом временного дискриминатора , третий вход блока оценки скорости соединен с выходом первого интегратора, первый, второй, третий и четвертый выходы блока оценки скорости соединены соответственно с вторым входом первого сумматора, с вторым входом второго сумматора, третьим входом третьего сумматора и первым инверсным входом первого сумматора, третий и четвертый входы блока оценки ускорения соединены соответственно с выходом первого фильтра нижних частот и выходом генератора опорных колебаний, первый, второй и третий выходы блока оценки ускорения соединены соответственно с третьим входом первого сумматора и четвертыми входами второго и третьего сумматоров, последовательно соединенные первый ключ, фазовый детектор и четвертый усилитель, последовательно соединенные пятый усилитель, четвертый сумматор и третий интегратор, выход которого соединен с управляющим входом управляемого фазовращателя, выход которого через фазовращатель на 90o соединен с опорным входом фазового детектора, шестой усилитель, вход которого соединен с выходом фазового детектора, а выход - с вторым инверсным входом первого сумматора, выход временного дискриминатора - с входом шестого усилителя, выход четвертого усилителя - с инверсным входом четвертого сумматора, вход первого ключа соединен с входом синхронного детектора, выход первого формирователя импульса - с управляющим входом первого ключа, причем входом устройства является вход синхронного детектора, отличающийся тем, что дополнительно введены последовательно соединенные второй ключ, первый триггер, блок совпадения, преобразователь код - напряжение, второй формирователь импульсов, а также второй и третий триггеры, первый и второй переключатели, генератор счетных импульсов, при этом выход второго формирователя импульса соединен с первым входом третьего триггера и вторым входом второго переключателя, выход которого соединен с вторым входом второго триггера, выход которого соединен с управляющим входом второго переключателя и входом формирователя следящих стробов, выход первого формирователя импульса соединен с управляющим входом второго ключа и вторым входом третьего триггера, выход которого подключен к управляющему входу первого переключателя, выход генератора счетных импульсов соединен с вторым входом блока совпадения, первый вход первого переключателя соединен с выходом преобразователя код - напряжение, второй вход первого переключателя соединен с выходом второго интегратора, при этом входом лазерного сигнала являются вход второго ключа, входом опорного лазерного сигнала является первый вход второго триггера и второй вход первого триггера, выходом устройства является выход первого переключателя.
| Молебный В.В | |||
| Оптико-локационные системы | |||
| М.: Машиностроение, 1984, с.180. |
