Предлагаемое устройство относится к типу автоматов для пропуска шва ткани между валами каландров, снабженных швоуловителем, управляющим работой нагнетательного и спускного кранов гидравлической системы каланд,ра.
Для П0(вышения чувствительности устройства в нем применена рычажная система, связанная с одной стороны с швоуловителем, а с другой стороны с собачкой храповика, управля1ош,его работой коленчатого вала, связанного с кранами гидравлической системы каландра и тормозного устройства для валика с тканью.
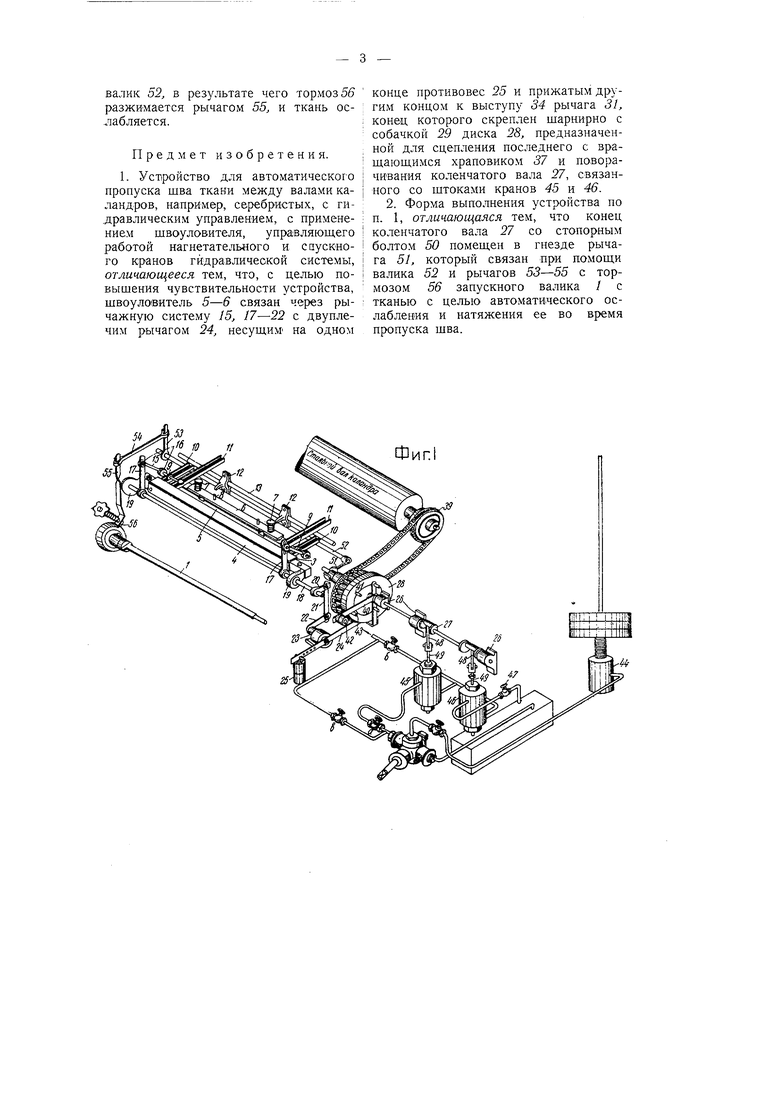
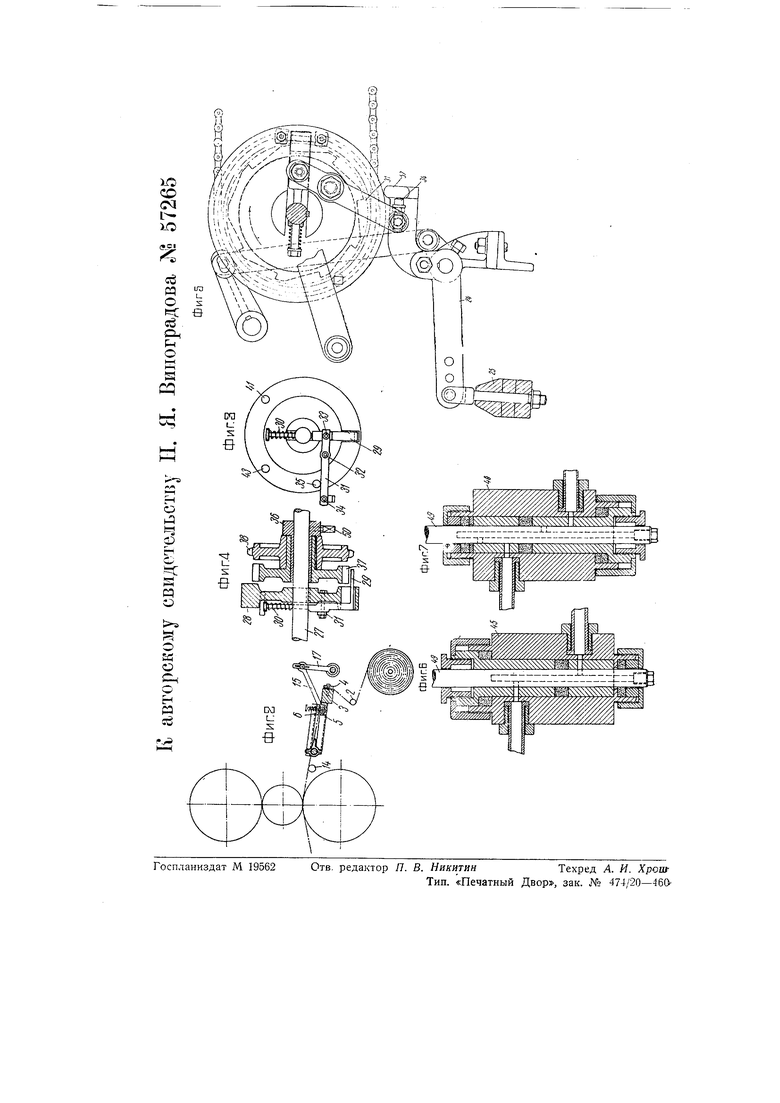
На чертеже фиг. 1 изображает общий вид устройства; фиг. 2- схему заправки ткани; фиг. 3 -вид храповикового устройства (собачки) сбоку; фиг. 4 - разрез устройства, изображенного на фиг. 3; фиг. 5 - вид пускового устройства сбоку; фиг. 6 и 7- разрез нагнетательного и спускного кранов,
Швоуловитель состоит из нижней стальной планки 5 (фиг. 1 и 2) и верхней 6, которая прижимается к нижней пружинами 7 и перемешается по направляюшим 5.
При помош,и двух роликов 9 на шарикоподшипниках Швоуловитель движется по коробчатым направляюш,им 10, а перевертывание его устранено применением двух направляющих /У.
Через два шатуна 15, монтированные на шарикоподшипниках 16, и два рычага 17 швоуловитель связан с валиком 8, вращающимся в щарикоподшипниках }9.
На валике 18 находится рычаг 20, который при помощи планки 2 neipeдает движение рычагу 22, вращаюшемуся на оси 23. На этой же оси насажен двуплечий рычаг 24 с упором 57 (фиг. 5) на одном конце и противовесом 25 на другом.
На трех подшипниках 26 монтнрован каленчатый вал 27 на| котором насажен диск 28, снабженный собачкой 29, проходящей сквозь вал 27; на конец собачки надета пружина 30. На .диске 28 имеется рычаг 3J, вращающийся па оси 32 И: сцепленный
с собачкой 29 болтом 33. На рычаге 3J имеется выступ 34 в виде болта, (фиг. 3 и 5), регулирующий степень и время поднятия собачки 29, предельный подъем которой определяется упорным болтом 35.
На валу 27j рядом с диско:М 28, свободно вращается на втулке 36 храповик 37 с цепной зубчаткой 38. Храповик вращается цепью от стального вала каландра, на конце которого сидит цепная зубчатка 39. Со стороны диска 28 на вал 27 свободно надет балансирный ,рычаг 40 с грузом 42, который находится; между упорными болтами 41 и 43 диска 28.
Гидравлическая система каландра выполнена следующим образом. Давление от аккумулятора 44 подводится к трехходовому крану, затем к гидравлическому цилиндру крана 45 высокого давления и от него к водяным цилиндрам каландра и параллельно к цилиндру спускного крана 46.
От крана 46 идет спускная труба с вентилем 47, выполняющим роль буфера для воды, выходящей из водяных цилиндров каландра при опускании вала; этим достигается наименьщее пропускание некаландрированной ткани по обе стороньг шва. При закрытых вентилях а и б и открытом в можно, на случай ремонта, работать при выключенном устройстве для пропускания щва, пользуясь трехходовым краном. При закрытом вентиле в и открытых а -к б работа идет с автоматическим пропуском швов; в этом случае трехходовый кран ставится в рабочее положение.
При заправке ткани трехходовый кран закрывают, вся . гидравлическая система выключается и нижний вал каландра опускается. Перекрытие и открытие кранов 45 и 46 осуществляется вращением коленчатого вала 27, вращательное движение которого преобразуется двумя шатунами 45 в прямолинейное движение HITOKOB 49 гидрав.ли;ческ;их кранов 45 и 46. Столорный болт 50 на втулке 36 находится в гнезде рычага 51, который связан при помощи валика 52 и рычагов 53, 54 и 55 с тормозом 56 валика /, на котором находится ролик ткани.
Ткань заправляется под валик 2 и далее в щель узлоуловителя 5-4, в щвоуловитель, над валиками 13 и 14 и поступает в жало валов каландра (фиг. 1 и 2).
При прохождении ткани без шва щвоуловитель находится в крайнем левом положении (фиг. 1), груз 25 рычага 24 опущен вниз и выступ 34 рычага 31 упирается в упор 57 рычага 24 (фиг. 5). Следствием этого является то, что пружина 30 сжата И1 собачка 29 не сцеплена с храповиком 37. При этом диск 28 к вал 27 находятся в таком положении, что вода из аккумулятора 44, пройдя трехходовый кран, поступает в цилиндр крана вы- . сокого давления, проходит через пустотелый шток 49 и поступает в водяные цилиндры каландра; в это время кран 46 закрыт.
При проходе шва он зажимается между планками 5-6 швоуловителя и сообщает последнему движение вперед до удара его о выступы 12, раскрывающие щво-улощитель. Это движение передается через описанную выше рычажную систему 15, 17-22 двуплечему рычагу 24, который поворачивается, поднимая при этом груз 25.
В результате опускания упора 57 опускается рычаг 31 и собачка 29 сцепляется с храповиком 37, вследствие чего начинают вращаться диск
28и вал 27. При первом полуобороте последнего закрывается кран 45 и открывается спускной кран , а в следующий полуоборот краны приходят
в начальное положение. После прэхо- , да щва груз 25 возвращает швоуловитель в исходное положение и поднимает упор 57, о который ударяется выступ 34 рьгчага 31, вследствие чего пружина 30 сокращается, собачка
29выходит из зацепления с храповиком 37 и диск 28, сделавщий один оборот, останавливается.
При вращении диска 28 рычаг 40 захватывается болтом 41 и, после прохождения верхней мертвой точки, ударяется, под действием груза 42, об упорный болт 43, ускоряя тем самым вращение джка 28.
При вращении вала 27 болт 50 нажимает на рычаг 51, повертывающий
валик 52, в результате чего тормоз 55 разжимается рычагом 55, и ткань ос-лабляется.
Предмет изобретения.
1. Устройство для автоматического пропуска шва ткаки между валами каландров, например, серебристых, с гидравлическим управлением, с применением швоуловителя, упра1вляющего работой нагнетательного и саускного кранов гидравлической системы, отличающееся тем, что, с целью повышения чувствительности устройства, швоуловитель 5-6 связан через рычажную систему J5j 17-22 с двуплечим рычагом 24, несущим на одном
конце противовес 25 и прижатым другим концом к выступу 34 рычага 31, конец которого скреплен шарнирно с собачкой 29 диска 28, предназначенной для сцепления последнего с вращающимся храповиком 37 и поворачивания коленчатого вала 27, связанного со щтоками кранов 45 и 46.
2. Форма выполнения устройства по п. 1, отличающаяся тем, что конец коленчатого вала 27 со стопорным болтом 50 помещен в гнезде рычага 51, который связан при помощи валика 52 и рычагов 53-55 с тормозом 56 запускного валика / с тканью с целью автоматического ослабления и натяжения ее во время пропуска щва.