1
Изобретение относится к автоматическому регулированию и может быть использовано в цифровых следящих системах для преобразования кода угла в угловое положение вала.
Известны цифроаналоговые следящие системы, преобразующие код угла в угловое положение вала 1, 2. Из известных цифроаналоговых следящих систем наиболее близкой к изобретению по технической сущности является следящая система, содержащая блок формирования кода, выходы которого соединены соответственно со входами преобразователей код-аналог точного и грубого отсчетов, усилитель мощности, выход которого подключен ко входу двигателя, с валом которого связан редуктор, а также блок вычитания, переключатель и нуль-детектор 3. Эта известная система характеризуется сложностью и, следовательно, пониженной надежностью изза наличия переключательных схем, а также недостаточной точностью работы, которая определяется ощибками кинематической передачи между выходными валами редукторов.
Целью изобретения является иовыщение точности работы и упрощение схемы. В описываемой системе это достигается тем, что она содержит индукционные датчики точного и грубого отсчетов с электрической редукцией между каналами и блок согласования, входы которого подключены к роторным обмоткам
индукционных датчиков, механически связанных с редуктором, а статорные обмотки индукционных датчиков подключены соответственно к выходам преобразователей код- аналог точного и грубого отсчетов, выход блока согласования подключен ко входу усилителя мощности.
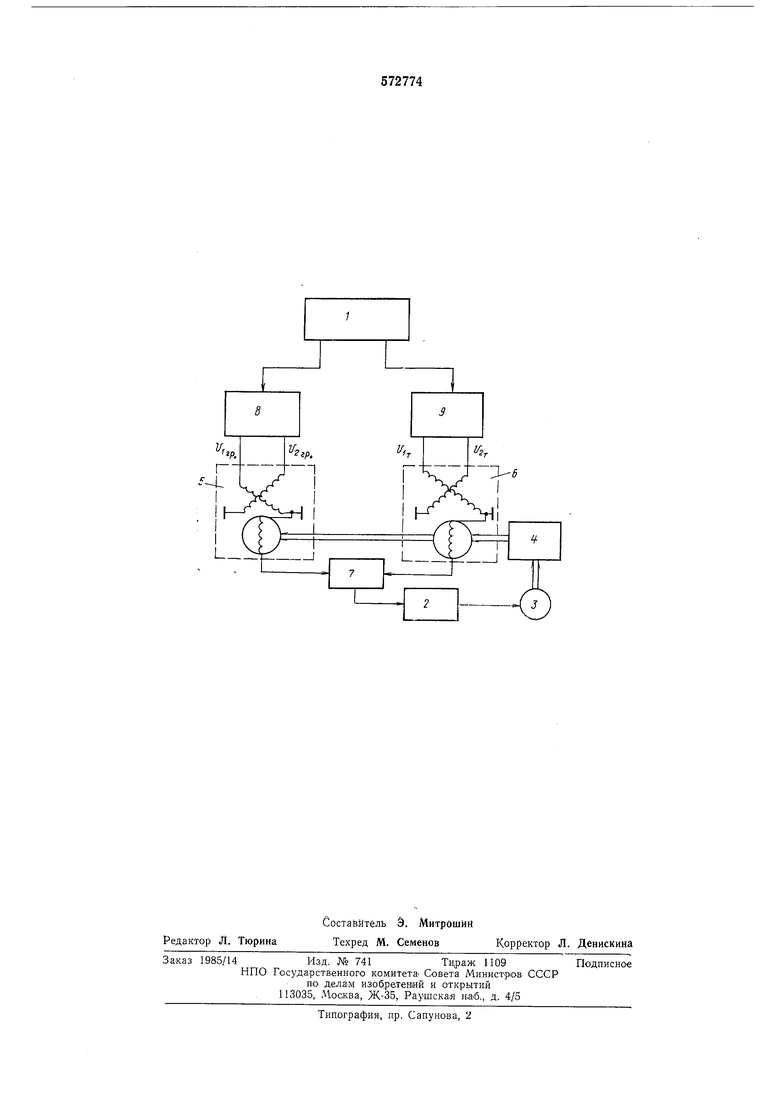
На чертеже приведена блок-схема описываемой системы.
Она содержит блок формирования кода 1, усилитель мощности 2, выход которого соединен с двигателем 3, вращающим редуктор 4, на выходном валу которого укреплены роторные обмотки индукционных датчиков 5 и б.
Роторные обмотки индукционных датчиков 5 и 6 соединены со входом блока согласования 7, выход которого соединен со входом усилителя мощности 2. Входы статорных обмоток индукционных датчиков 5 и 6 соединены с
выходом соответствующих преобразователей код-аналог грубого 8 и точного У отсчетов, входы которых соединены с выходами блока формирования кода 1.
В случае, когда в качестве индукционных
датчиков 5 и 6 применены синусно-косинусные трансформаторы (СКТ) с электрической редукцией, равной 32, на преобразователь код-аналог грубого отсчета 8 поступает код угла из блока формирования кода 1, представляющего в этом случае регистр, полное
содержание которого соответствует 360° отрабатываемого угла, а на преобразователь код-аналог точного отсчета 9 - код угла, сдвинутый на пять разрядов влево в сторону старших разрядов, при этом пять старших разрядов выходят за пределы разрядной сетки. В результате на выходе преобразователя код-аналог грубого отсчета 8 устанавливаются напряжения питания статорных обмоток
ij, ; АГгр sin 7. sin 2. Kif cos а sin №t.
где ( - напряжение питания синусной
irp - напряжение статорной обмотки индукционного датчика 5;
V Zf.y - напряжение питания косинусной статорной обмотки индукционного датчика 6;
а - величина угла, подлежащего отработке следяш,ей системой; Ягр. - коэффициент пропорциональности; со - круговая частота напряжения питания индукционных датчиков. На выходе преобразователя код-аналог точного отсчета 9 устанавливаются напряжения
i/i - /CT sin 32э. sin wt; U . /CT cos 32a sin wt,
где U - напряжение питания синусной статорной обмотки индукционного датчика 5;
Uzf-напряжение питания косинусной статорной обмотки индукционного датчика 5;
- коэффициент пропорциональности. Таким образом, при появлении в блоке 1 кода, соответствуюш,его углу а, на статорные обмотки индукционных датчиков 5 и 6 подаются такие же напряжения, как и в случае соединения этих датчиков но трансформаторной схеме дистанционной передачи угла и повороте задаюш.его вала на датчиках 5 и 6 на угол а. При этом на выходе роторных обмоток появляются напряжения рассогласования, которые поступают на вход блока согласования 7. Напряжение выхода блока согласования 7 через усилитель мощности 2 поступает на управляющую обмотку двигателя 3, который через редуктор 4 разворачивает роторные
обмотки на угол до положения согласования, при этом напряжения рассогласования уменьшаются до 0.
Таким образом, снижается количество оборудования и, следовательно, повышается надежность работы системы, так как в ней отсутствуют элементы с низкой надежностью работы, как потенциометры грубого и точного отсчетов, промежуточный редуктор, вращающий потенциометры точного отсчета, вычитающие устройства, нуль-детектор и переключатель. Точность работы следящей системы повышается в результате введения индукционных датчиков с электрической редукцией и исключения механического редуктора между датчиками.
Формула изобретения
Цифроаналоговая следящая система, содержащая блок формирования кода, выходы которого соединены соответственно со входами преобразователей код-аналог точного и грубого отсчетов, усилитель мощности, выход которого подключен ко входу двигателя, с
валом которого связан редуктор, отличающаяся тем, что, с целью повышения точности и надежности системы, она содержит индукционные датчики точного и грубого отсчетов и блок согласования, входы которого подключены к роторным обмоткам индукционных датчиков, механически связанным с редуктором, а статорные обмотки индукционных датчиков подключены соответственно к выходам преобразователей код-аналог, выход блока
согласования подключен ко входу усилителя мощности.
Источники информации, принятые во внимание при экспертизе
1.Патент Англии № 1150726, кл. G 05D, 1969.
2.Авторское свидетельство СССР №318906, кл. G 05В 11/06, 1970.
3.Патент США № 3569959, кл. 318-214, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь кода в угол поворота вала | 1985 |
|
SU1312741A1 |
| ПРЕОБРАЗОВАТЕЛЬ «УГОЛ — КОД» | 1973 |
|
SU397953A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU645190A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2017 |
|
RU2654371C1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| Измеритель углового рассогласования и его производной для следящих систем | 1975 |
|
SU600518A1 |