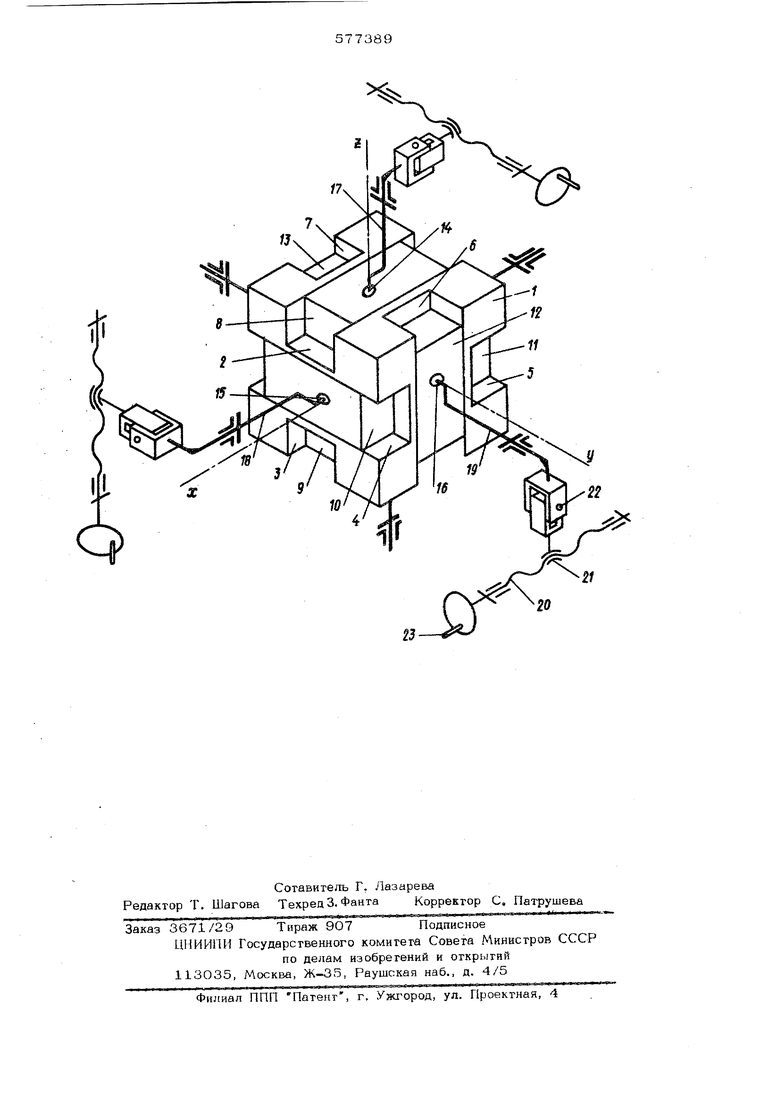
Д,|я упрощения конструкции и увеличения жесткости призматические пазы расположены на всех шести гранях подвижного эвена и выполнены параллельными на противолежащих гранях, ползуны размещены на кривошипных щейках ропарно, кривошипные шейки выполне ны удлиненными, а ползуны - подвижными вдоль кривошипных шеек, Трехкоординагный механизм посгупательно го перемешения , изображен на чергеже. Он содержит подвижное звено 1 с тремя парами попарно параллельных призматических пазов 2-3; 4-5 и 6-7. Пазы 2- расположены вдоль координатной оси X; пазы ВДОЛЬ оси у, а пазы 6-7 - вдоль оси Z . В пазах расположены ползуны, соответственно 8-9, 10-11 и 12-13. Каждая пара пол зунов размещена; на кривошипной шейке 14; 15и 16 кривошипных валов 17, IS и 19, коренные шейки которых установлены в не-подвижных звеньях механизма. При этом кривошипная шейка 14 параллельна оси Z, кривошипная шейка 15 оси X, а кривошипная шейка 16 - оси У, Длина кривошипных шеек превышает размеры подвижного звена на величину координатного перемещения поО леднего; ползуны выполнены подвижными вдоль кривошипных шеёЛ; Для поворота каждого из кривошипных валов служит мбхайнзм; сйстойший из ходового винта 20, гайки 21 и кулисного по- водка 22. Для враш.е.нйя одового винта выполнен маховичок 23. Трехкоординатный механизм поступательного перемещения работает следующим об- разом. Для перемещения вдоль координатной оси X, поворачивают кривошипный вал 19, кр вошипная шейка А 6 которого перемещает ползуны 12 и 13. Последние, воздействуя на боковые грани призматических пазов 6 и 7, перемещают подвижное звено 1. Направ ляющими поступательного движения в направ лении(х;и X служат;боковые грани ползунов 8 г, кривошипная шейка 15. Для перемещения вдоль координатной оси У поворачивают кривошипшлй вал 17, а направляющими для поступательного движения вдоль этой оси служат боковые грани ползунов 10 и 11, и кривошипная шейка 16. Для перемещения вдоль оси i поворачивают кривошипный вал 18, а направляющими служат боковые грани ползунов 12 и 13 и кривошипная шейка 14. Как видно из описания работы механизма, последний симметричен относительно всех осей координат и не имеет избыточных кинематических связей, что обеспечивает его простоту и точность работы. Формула изобретения Трехкоординатный механизм поступагельного перемеш.ения, содержащий подвиж- нее Звено с взаимно перпендикулярными плоскими гранями, три пары призматических пазов, расположенных вдоль соответствутоших координатных осей, и приводы координатных перемещений, выполненные в виде ползунов, размещенных в призматических пазах, и крййошипных валов с центрально, размещенными коренными и эксцентричными кривошипными шейками, d т ли ч а ю - ш и и с я тем, что, с целью упрощения конструкиии и увеличения жесткости механизма, призматические пазы ньшолнены на всех шести гранях подвижного звена и расположены параллельно на противолежащих гранях, ползуны размещены на кривошипных шейках попарно, кривошипные шейки выполнены удлиненными, а ползуны - подвижными вдоль кривошипных шеек. Источники информации, принятые во вни- мание при экспертизе: 1. Авг.орское свидетельство СССР № 399713, кл. G-Ql В 5/00, 1974. 2. Артоболевский И. И. Механизмы в современной технике. Наука, 1971,т. 1( , с. 2. г,
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкоординатный механизм поступательного перемещения | 1977 |
|
SU682751A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ И ОБЪЕМНАЯ МАШИНА, ИСПОЛЬЗУЮЩАЯ ТАКОЙ МЕХАНИЗМ | 2010 |
|
RU2494260C2 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ С ПРЯМОУГОЛЬНЫМ ПОРШНЕМ | 2016 |
|
RU2631475C1 |
| Координатный стол | 1987 |
|
SU1493437A1 |
| Бесшатунный механизм поршневой машины | 2021 |
|
RU2781324C1 |
| РЕВЕРСИВНОЕ УСТРОЙСТВО ДЛЯ ДВУХТАКТНОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1969 |
|
SU241813A1 |
| БЕСШАТУННЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2007 |
|
RU2345259C1 |
| ПОРШНЕВАЯ МАШИНА С БЕСШАТУННЫМ МЕХАНИЗМОМ | 2000 |
|
RU2213227C2 |
| ПОРШНЕВАЯ МАШИНА (ЕЕ ВАРИАНТЫ) | 1994 |
|
RU2096638C1 |
| ШЕСТЕРЕННЫЙ БЕСШАТУННЫЙ МЕХАНИЗМ С МНОГОКОЛЕНЧАТЫМ ВАЛОМ | 2013 |
|
RU2537073C1 |