4
СО 00 4 СО
Изобретение относится к станкостроению, а именно к координатным столам для контурной обработки изделий на металлорежущих станках, осна- щенных устройствами числового программного управления.
Целью изобретения является расширение технологических возможностей за счет обеспечения вращения предмет ной плиты.
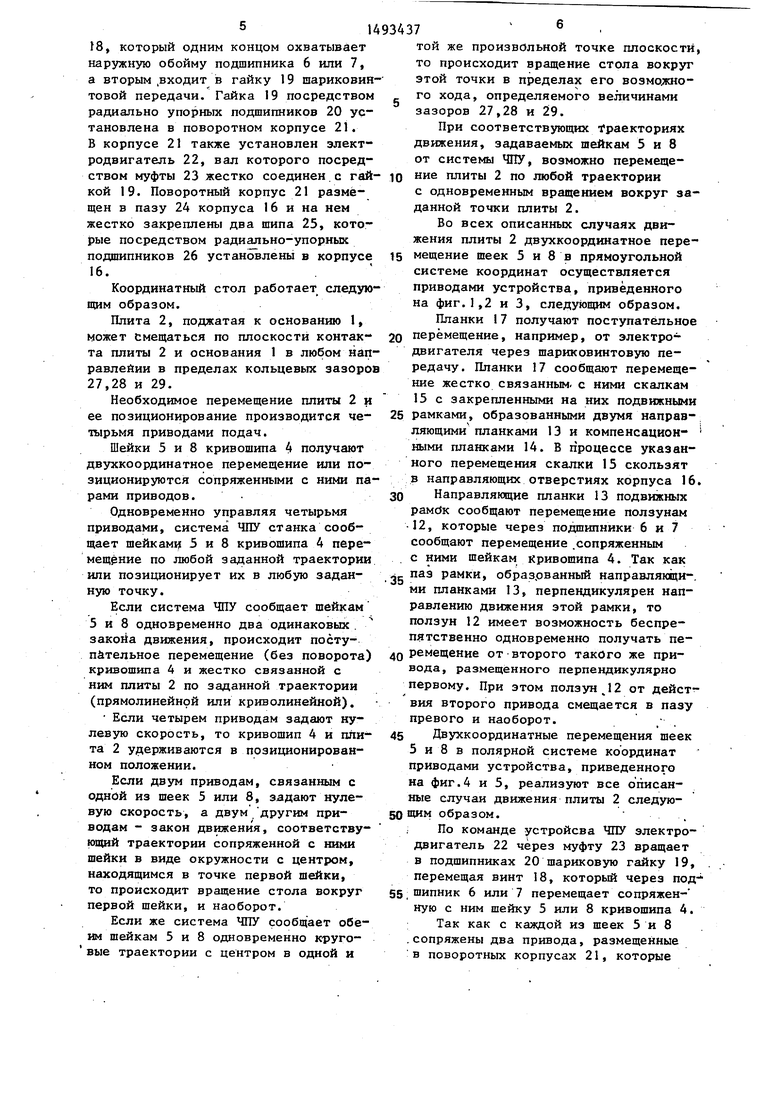
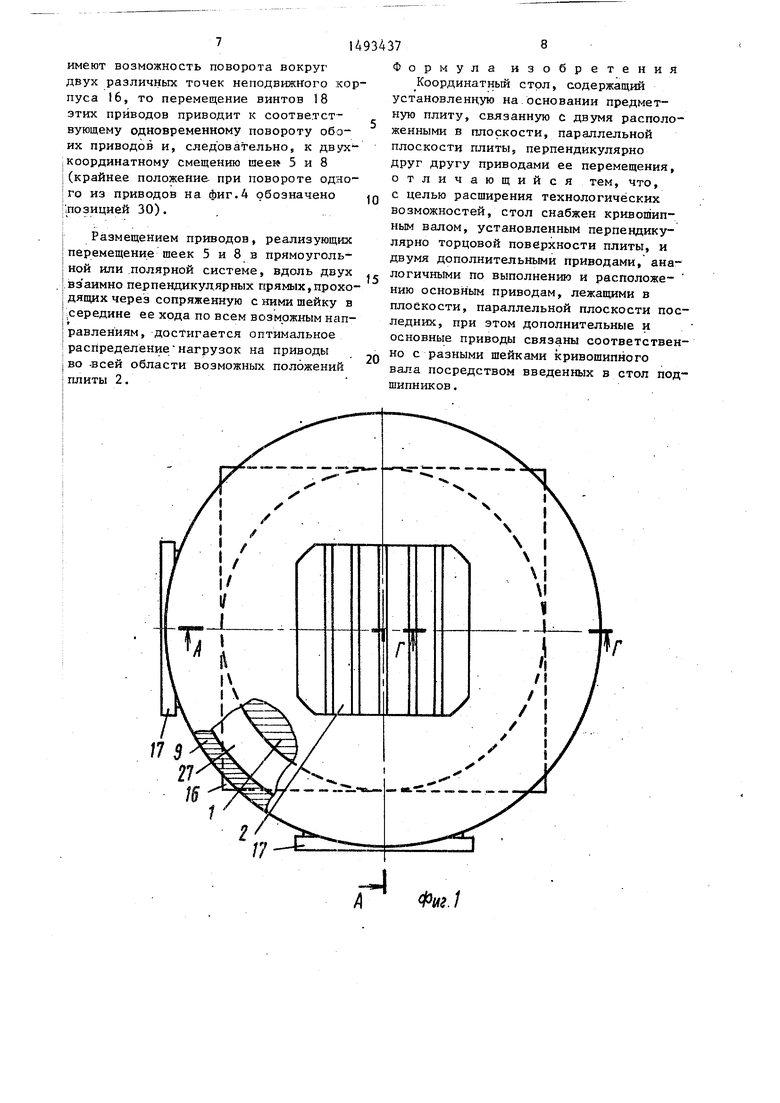
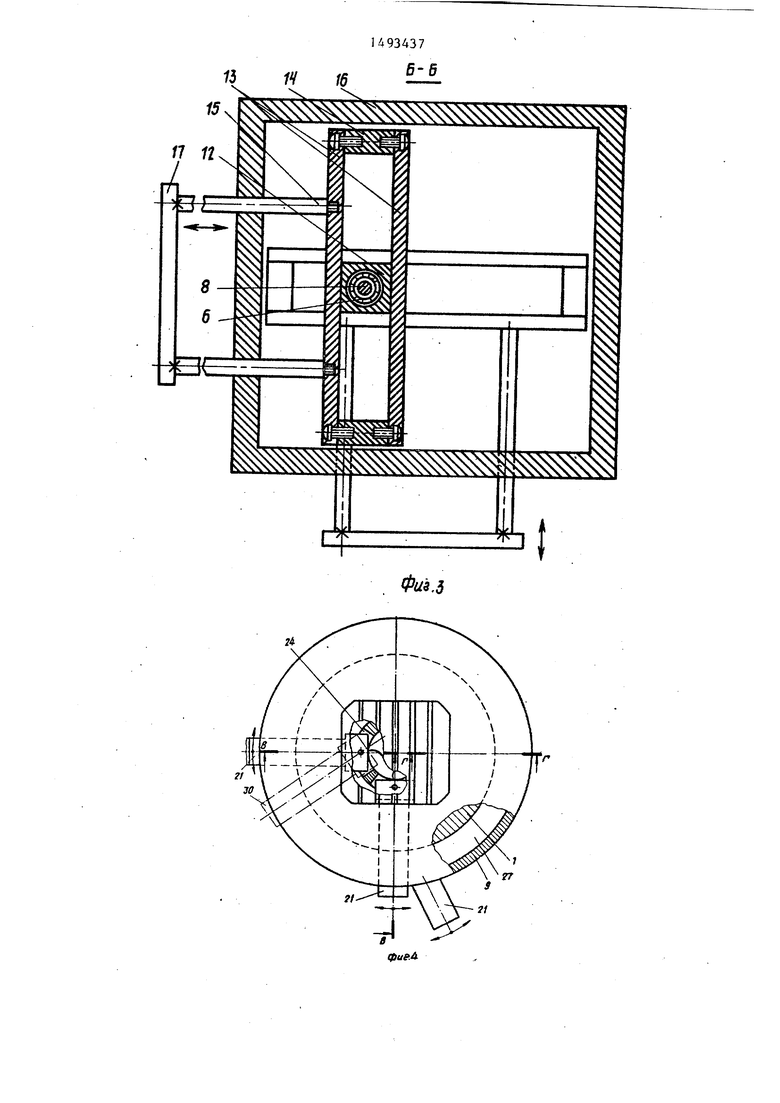
На фиг.1 изображен стол, вид в плане; на фиг.2 разрез А-А на фиг.1; на фиг.З - разрез Б-В на фиг.2; на фиг.4 - стол, вид в плане (вариант выполнения приводов подач подвижной плиты); на фиг.5 - разрез В-Б на фиг.4; на фиг.6 - разрез Г-Т на фиг.4.
Координатньй стол для контурной , обработки изделий на металлорежущем станке, оснащенном устройством ЧШ , содержит основание 1, предметную тш ту 2 для размещения изделий, устано
ленную своим плоским базовым торцом 3 на основании 1 с возможностью перемещения .относительно последнего . На плите 2 перпендикулярно -ее базовому торцу 3 жестко закреплен кривошипный вал 4, -с шейкой 5 которого посредством подщипников 6 и 7 сопряжены основные приводы подач, а с шейкой 8 аналогично сопряжены допол нительные приводы подач. Пары приводов подач, сопряженные С шейкой 5 либо 8 кривошипа 4, размещены вдоль двух взаимно перпендикулярных прямых, проходящих через шейки 5 либо 8 соответственно, в середине их хода по всем возможным направлениям.
Плита 2, компенсационное кольцо 9 и прижимное кольцо 10 охватывают основание 1.
Геометрический натяг имеет место за счет того, что толщина компенсационного кольца 9 несколько меньше толщины основания 1 .
Возможны также варианты конструкции с созданием силового натяга. При этом прижимное кольцо 10 связывают с верхней плитой 2 посредством пружин, устанавливаемых вместо кольца 9.
Таким образом, плита 2 постоянно поджата к основанию .
Для повышения плавности перемещения и уменьшения трения по поверх-.
JQ
15
20
л
25
493437
ностям плиты 2-й прижимного кольца 10, контактирующим с основанием 1, на последнее может быть нанесено антифрикционное покрытие, например наклеена лента 11 из наполненного фторопласта.
Возможна также установка между контактирующими поверхностями сепараторов с телами качения.
Каждая пара приводов, сопряженных с одной и той же шейкой кривошипа 4, предназначена для двухкоор- динатного перемещения и позиционирования этой шейки по любому направлению в плоскости, параллельной базовому торцу 3 плиты 2, в пределах хода, определяемого размерами конструктивных элементов устройства. Перемещение и позиционирование шеек кривошипа 4 может быть реализовано в прямоугольной или полярной системе координат.
В каждом варианте конструкции все четыре привода подач плиты 2 имеют идентичную конструкцию. На подшипниках 6 и 7 каждой из шеек 5 и 8 устройства, приведенного на фиг.1 1,2 и 3, установлены ползуны 12, входящие в поступательные пары с двумя взаимно перпендикулярными подвижными рамками.
Каж,цая рамка образована двумя направляющими планками 13, которые жестко соединены между собой через компенсационные планки 14. За счет пригонки планок 14 по высоте достиг гается безлюфтовость поступательных пар.
Для повьш1ения плавности перемещения и снижения трения на плоскости ползуна 12, контактирующих с направ- лякяцими планками 13 подвижных рамок, может быть нанесено антифрикционное покрытие, например наклеена лента из наполненного фторопласта, либо установлены роликовые танкетки.
Подвижные рамки закреплены на двух скалках 15, которые с возмож ностью поступательного перемещения размещены в отверстиях корпуса 16 и жестко соединены между собой планкой 17.
Планка 17 может приводиться, например, от электродвигателя через гаа- риковинтовую передачу (не показано).
Приводы устройства, -приведенного на фиг.4 и 5, KpoMQ подшипников 6 и 7, могут быть выполнены в виде винта
30
35
40
45
50
55
f8, который одним концом охватывает наружную обойму подшипника 6 или 7, а вторым ,входит в гайку 19 шариковин товой передачи. Гайка 19 посредством радиально упорных подшипников 20 установлена в поворотном корпусе 21. В корпусе 21 также установлен электродвигатель 22, вал которого посредством муфты 23 жестко соединен с гайкой 19. Поворотный корпус 21 размещен в пазу 24 корпуса 16 и на нем жестко закреплены два шипа 25, которые посредством радиально-упорных подшипников 26 установлены в корпусе 16.
Координатный стол работает следующим образом.
Плита 2, поджатая к основанию 1, может Смещаться по плоскости контакта плиты 2 и основания 1 в любом нап равлейии в пределах кольцевых зазоро 27,28 и 29.
Необходимое перемещение плиты 2 и ее позиционирование производится четырьмя приводами подач.
Шейки 5 и 8 кривошипа 4 получают двухкоординатнре перемещение или позиционируются сопряженными с ними парами приводов.
Одновременно управляя четырьмя приводами, система ЧПУ станка сообщает шейками 5 и 8 кривошипа 4 пере- мещрние по любой заданной траектории или позиционирует их в любую заданную точку.
Если система ЧПУ сообщает шейкам 5 и 8 одновременно два одинаковых . закойа движения, происходит посту- пйтельное перемещение (без поворота) кривошипа 4 и жестко связанной с ним плиты 2 по заданной траектории (прямолинейной или криволинейной).
Если четырем приводам задают нулевую скорость, то кривошип 4 и плита 2 удерживаются в позиционированном положении.
Если двум приводам, связанным с одной из шеек 5 или 8, задают нулевую скорость, а двум другим приводам - закон движения, соответствующий траектории сопряженной с ними шейки в виде окружности с центром, находящимся в точке первой шейки, то происходит вращение стола вокруг первой шейки, и наоборот.
Если же система ЧПУ сообщает обеим шейкам 5 и 8 одновременно круго- вые траектории с центром в одной и
той же произвольной точке плоскости, то происходит вращение стола вокруг этой точки в пределах его возмодно- го хода, определяемого величинами зазоров 27,28 и 29.
При соответствующих Траекториях движения, задаваемых шейкам 5 и 8 от системы ЧПУ, возможно перемеще0 ние плиты 2 по любой траектории
с одновременным вращением вокруг заданной точки плиты 2.
Во всех описанных случаях движения плиты 2 двухкоординатное пере5 мещение шеек 5 и 8 в прямоугольной системе координат осуществляется приводами устройства, приведенного на фиг.1,2 и 3, следующим образом. Планки I7 получают поступательное
0 перемещение, например, от электродвигателя через шариковинтовую передачу. Планки 17 сообщают перемещение жестко связанным, с ними скалкам 15 с закрепленными на них подвижными
5 рамками, образованными двумя направляющими планками 13 и компенсацион- ными планками 14. В процессе указанного перемещения скалки 15 скользят в направляющих отверстиях корпуса 16.
0 Направляющие планки 13 подвижных paMdK сообщают перемещение ползунам 12, которые через подшипники 6 и 7 сообщают перемещение .сопряженным . с ними шейкам Кривошипа 4. Так как
g паз рамки, образ.ованный направляющи-. ми планками 13, перпендикулярен направлению движения этой рамки, то ползун 12 имеет возможность беспрепятственно одновременно получать пе0 ремещение от второго такого же привода, размещённого перпендикулярно первому. При этом ползун J2 от действия второго привода смещается в пазу превого и наоборот. .
5 Двухкоординатные перемещения шеек 5 и 8 в полярной системе координат приводами устройства, приведенного на фиг.4 и 5, реализуют все описанные случаи движения плиты 2 следую0 Щим образом.
По команде устройсва ЧПУ электродвигатель 22 через муфту 23 вращает в подшипниках 20 шариковую гайку 19, перемещая винт 18, который через под5, шипник 6 или 7 перемещает сопряжен- ную с ним шейку 5 или 8 кривошипа 4.
Так как с каждой из шеек 5 и 8 .сопряжены два привода, размещенные в поворотных корпусах 21, которые
/7
15
1493437
Б-В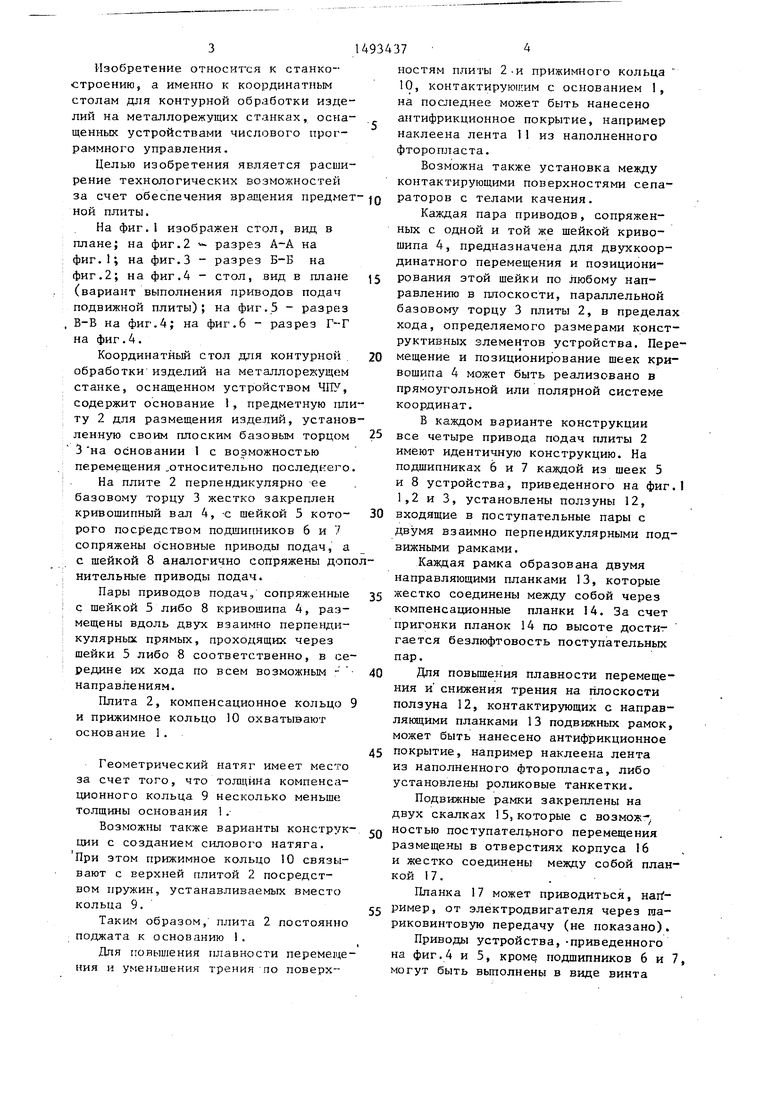
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ И СПОСОБ УСТРАНЕНИЯ ЗАКЛИНИВАНИЯ ЕГО МЕХАНИЗМА | 2012 |
|
RU2538349C2 |
| Устройство для изготовления коленчатых валов | 1984 |
|
SU1440333A3 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Гибкий производственный модуль | 1990 |
|
SU1824287A1 |
| Вертикальный механический пресс | 1988 |
|
SU1636250A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| УСТРОЙСТВО ИЗМЕНЕНИЯ РАДИУСА КРИВОШИПА КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА | 2016 |
|
RU2651897C1 |
| Привод подачи фрезерного станка для обработки вафельной конструкции обечайки | 2024 |
|
RU2824782C1 |
| Устройство для поперечной прокатки прутков | 1977 |
|
SU735368A1 |
| Металлорежущий станок со сменными шпиндельными головками | 1991 |
|
SU1784443A1 |

Изобретение относится к координатным столам для контурной обработки изделий на металлорежущих станках с ЧПУ. Цель изобретения - расширение технологических возможностей за счет обеспечения вращения предметной плиты. При включении, например, верхних и нижних приводов возвратно-поступательного перемещения, расположенных во взаимно перпендикулярных направлениях, в параллельных плоскостях последние при одинаковом законе перемещений через планки 17 сообщают перемещение скалкам 15, а те через подшипники 6 и 7, шейки 5 и 8 кривошипного вала 4 передают поступательное перемещение плите 2, расположенной на основании 1. При включении нижних приводов возвратно-поступательного перемещения, но по другому закону перемещений, они через планки 17, скалки 15, подшипники 6 и 7, шейки 8 кривошипного вала 4 сообщают плите 2 вращательное перемещение. 6 ил.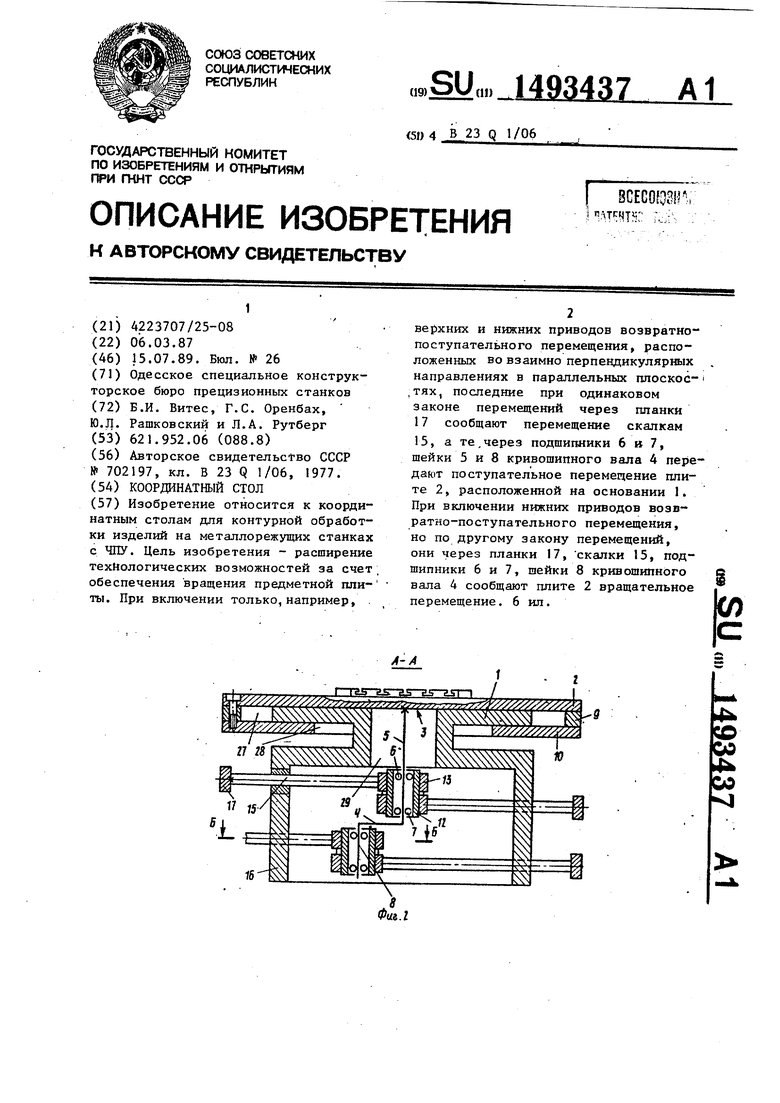
Физ,
24 20 25 26 W 7 65 23
f3
Фи5.5
28 1 W 27 9 2
r-r
11
SI
Фие.6
| Устройство двухкоординатного перемещения | 1977 |
|
SU702197A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
