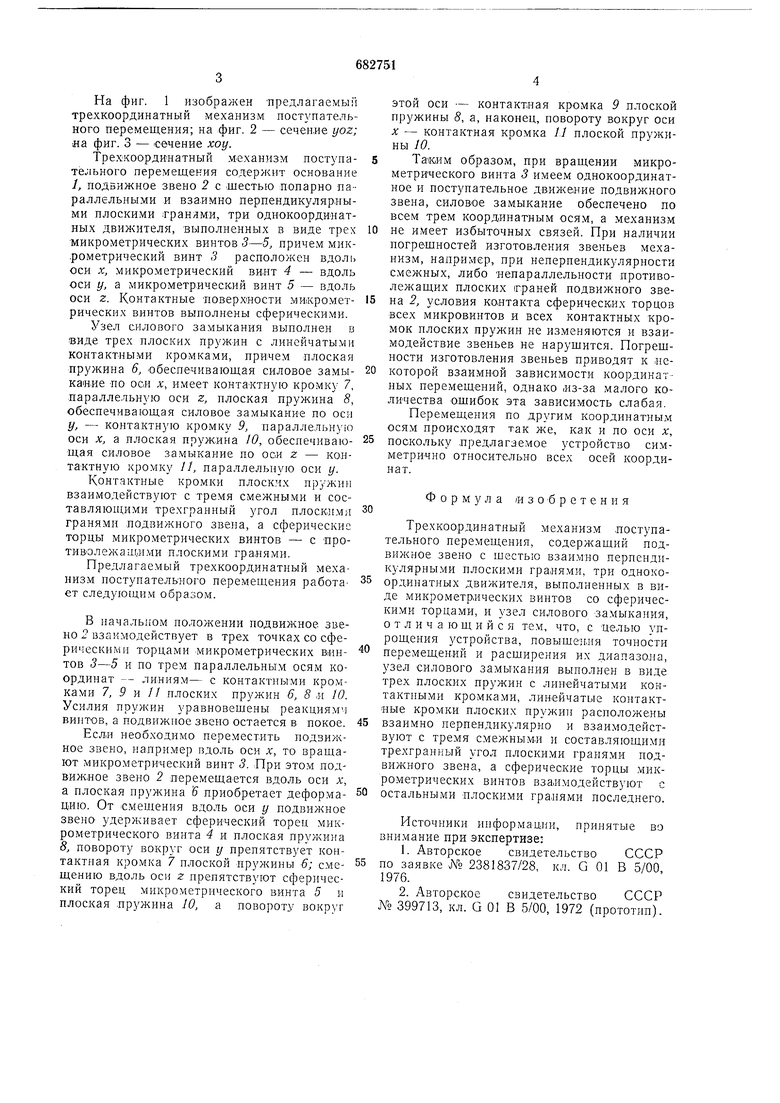
Изобретение относится к области точной механики и может быть иснользовано в средствах измерительной техники в качестве механизма юстировочных перемещений. Известны трехкоордннатные механизмы поступательного перемещения, содержащие подвижное звено с .взаимно перпендикулярными плоскими гранями, три лары направляющих звена, выполненными в виде призматических пазов и ползунов, размещенных в пазах, и три нривода координатных перемещений, вынолненные в виде крнвощинщых валов, взаимодействующих с ползунами 1. Недостатками этих устройств являются значительная сложность, нелинейность приводов координатных перемещений, а также повыщенная зона нечувствительности вследствие наличия зазоров в кривощияном механизме и направляющих поступательного движения. Известны также трехкоординатные механизмы ностунательного перемещения, содержащие подвижное звено с щестью взаимио перпендикулярными плоскими гранями, три однокоординатных движителя, выполненных в виде микрометрических винтов, со сферическими торцами, и узел силового замыкания, взаимодействующий с подвижным звеном так, что реакция этого узла составляет острый угол со всеми тремя однокоординатным.и подвиж-нымн плунжерами 2. Недостатки таких устройств - малая точность вследствие избыточности связей, накладываемых тремя плоскими торцами подвижных плапжсров; неточность поступательного движения плунжеров; ограниченный дианазон перемещения нодвижного звена, определяемый размерами плоского торца и направлением реакцпи узла силового замыкания; сложность из-за значительного количества промежуточных звеньев. Цель изобретения - упрощение устройства, повышение точности перемещений и расщирение диапазона неремещеннй. Это достигается тем, что узел оптового замыкания выполнен в виде трех плоских пружин с линейчатыми контактными кромками, л.инейчатые контактные кромки плоских пружин расположены взаимно нерпендикулярно и взаимодействуют с тремя смежными и составляющими трехгранный угол плоскими гранями подвилчного звена, а сферические торцы микрометрических винтов взаимодействуют с остальными плоскими гранями последнего. На фиг. 1 изображен предлагаемый трехкоординатный механизм поступательного перемещения; на фиг. 2 - сечеиле yoz; на фиг. 3 - сечение хоу. Трехкоординатный м еханизм поступательного перемещения содержит основание /, подвижное звено 2 с шестью попарно параллельными и взаимно перпендикулярными плоскими гранями, три однокоорди«атных движителя, выполненных в виде трех микрометрических винтов 3-5, причем мик.рометрический винт 3 расположен вдоль оси X, микрометрический винт 4 - вдоль оси у, а микрометрический винт 5 - вдоль оси Z. Контактные тюверхности мшфометрических винтов выполнены сферическими. Узел силового замыкания выполнен Б виде трех плоских пружин с линейчатыми контактными кромками, причем плоская пружина 6, Обеспечивающая силовое замыкан.ие по оси х, имеет контактную кромку 7, параллельную оси z, нлоская пружина 8, обеспечивающая силовое замыкание по оси у, - контактную кромку 9, параллельную оси X, а плоская пружина 10, обеспечивающая силовое замыкание но сои z - контактную кромку }, параллельную оси у. Контактные кромки плоских пружин взаимодействуют с тремя смежными и составляюнадми трехгранный угол плоскими гранями подвижного звепа, а сферические торцы микрометрических винтов - с противолежащими плоскими граиями. Предлагаемый трехкоординатный механизм поступательного перемещения работает следую1цим образом. В началыгом положении подвижное звено 2 взаимодействует в трех точках со сферическими торцами микрометрических винтов 3-5 и по трем параллельным осям координат - линиям- с контактными кромками 7, 9 и // плоских пружин 6, 8 ,ii 10. Усилия пружин уравновещены реакциями виптов, а подвижное звено остается в покое. Есди необходимо переместить подвижное звено, иапример вдоль оси х, то вращают микрометрический винт 5. При этом подвижиое звено 2 перемещается вдоль оси л , а плоская пружина 6 приобретает деформацию. От Смещения вдоль оси у подвижное звено удерживает сферический торец микрометрического винта 4 и плоская пружина 8, повороту вокруг оси у препятствует контактная кромка 7 плоской нружины 6; смещению вдоль оси z препятствуют сферический торец микрометрического винта 5 и плоская пружина 10, а повороту вокруг этой оси - контактная кромка 9 плоской пружины 8, а, наконец, повороту вокруг оси X - контактная кромка 11 плоской пружины 10. Таишм образом, при вращении микрометрического випта 3 имеем однокоординатное и поступательное движение подвижного звена, силовое замыкание обеспечено по всем трем координатным осям, а механизм не имеет избыточных связей. При наличии погрешностей изготовления звеньев механизм, например, при неперпендикулярности смежных, либо яепараллельности нротиволежащих плоских граней подвижного звена 2, условия контакта сферических торцов всех микровинтов и всех контактных кромок плоских пружин не изменяются и взаимодействие звеньев не нарущится. Погрещности изготовления звеньев приводят к некоторой взаимной зависимости координатных перемещений, однако из-за малого количества ошибок эта зависимость слабая. Перемещения по другим координатным осям происходят так же, как и по оси х, поскольку .предлагаемое устройство симметрично относительно всех осей координат. Формула /изобретения Трехкоординатный механизм поступательного перемещения, содержащий подвижное звено с шестью взаимно перпендикулярными плоски.ми гранями, три однокоординатных движителя, выполненных в виде микрометрических винтов со сферическими торцами, и узел силового замыкания, отличающийся тем, что, с целью упрощения устройства, повышения точности перемещений и расщирения их диапазона, узел силового замыкания выполнен в виде трех плоских пружин с линейчатыми контактными кромками, линейчатые контактные кромки плоских пружин расположены взаимно перпендикулярно и взаимодействуют с тремя смежными и составляющими трехгранный угол плоскими гранями подвижного звена, а сферические торцы микрометрических винтов взаимодействуют с остальными плоскими граИями последнего. Источники информации, принятые во вни.мание при экспертизе; 1.Авторское свидетельство СССР по заявке JYo 2381837/28, кл. G 01 В 5/00, 1976. 2.Авторское свидетельство СССР JYo 399713, кл. G 01 В 5/00, 1972 (прототип).
/7Z
D
ж
-5 г
. 7
Puvf
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения | 1989 |
|
SU1733907A1 |
| Трехкоординатный механизм поступательного перемещения | 1976 |
|
SU577389A1 |
| Измерительная консоль координатной измерительной машины | 1984 |
|
SU1378793A3 |
| СПОСОБ ФОРМИРОВАНИЯ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 2007 |
|
RU2356704C2 |
| Микроманипулятор для сферических объектов | 1986 |
|
SU1366385A1 |
| ТРЕХКООРДИНАТНЫЙ ПРЕЦИЗИОННЫЙ СТОЛИК (ВАРИАНТЫ) | 2007 |
|
RU2368021C2 |
| Механизм линейной юстировки | 1972 |
|
SU438047A1 |
| БЛОК СВЕТОДЕЛИТЕЛЬНОЙ ПРИЗМЫ И ПРИБОРА С ЗАРЯДОВОЙ СВЯЗЬЮ И СПОСОБ СБОРКИ ПОД ЮСТИРОВКУ ЭТОГО БЛОКА | 1997 |
|
RU2120196C1 |
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА ДЛЯ ФОРМИРОВАНИЯ РЕЗАНИЕМ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ | 2007 |
|
RU2360771C2 |
| ВТУЛКА ВОЗДУШНОГО ВИНТА С АВТОМАТОМ ПЕРЕКОСА | 2018 |
|
RU2746024C2 |

