Изобретение относится преимущественно к рубероидному производству, давая новую конструкцию резательного аппарата для рубероидных машин. Естественно, что предлагаемая конструкция может быть использована и на аналогичных операциях в родственных отраслях промышленности.
Имеющиеся, обычно, в рубероидной промышленности машины приспособлены по своим габаритам к пропуску ленты шириной в 2 м. Однако технические требования на рубероид требуют ширины рубероида в 1 м.
Многие машины оборудованы специальными ножами для резки 2-метровОй ленты в месте ее выхода. Таким образом, одновременно должны были выпускаться машиной две ленты рубероида шириной 1 м каждая.
Однако, такая резка рубероида создавала целый ряд производственных затруднений; при движении ленты последняя получала постоянное колебательное движение по валкам (гу ляние вдоль валков). В результате такого гуляния линия резки получалась неровной и изорванной. Всякие удерживающие и ограничивающие гуляние приспособления приводили к порче кромок ленты и к разрывам.
Принцип работы предлагаемого резате.1ьного аппарата заключается в том, чтобы не ограничивая гуляния рубероидной ленты, сообщить режущим ножам синхронное гуляние, связав их в одну систему с рубероидной лентой. В результате указанного обстоятельства положение ножей относительно кромок ленты должно оставаться неизменным. Могущие быть отклонения должны оставаться в пределах нормы.
Принудительное вращение ножей для операции резания осуществляется от общего привода машины. Скорости вращения ножей синхронно связаны со скоростью перемещения ленты.
Таким образом резательный аппарат представляет собой самостоятельную часть машины, работа которого протекает совершенно нормально вне зависимости от гуляния ленты.
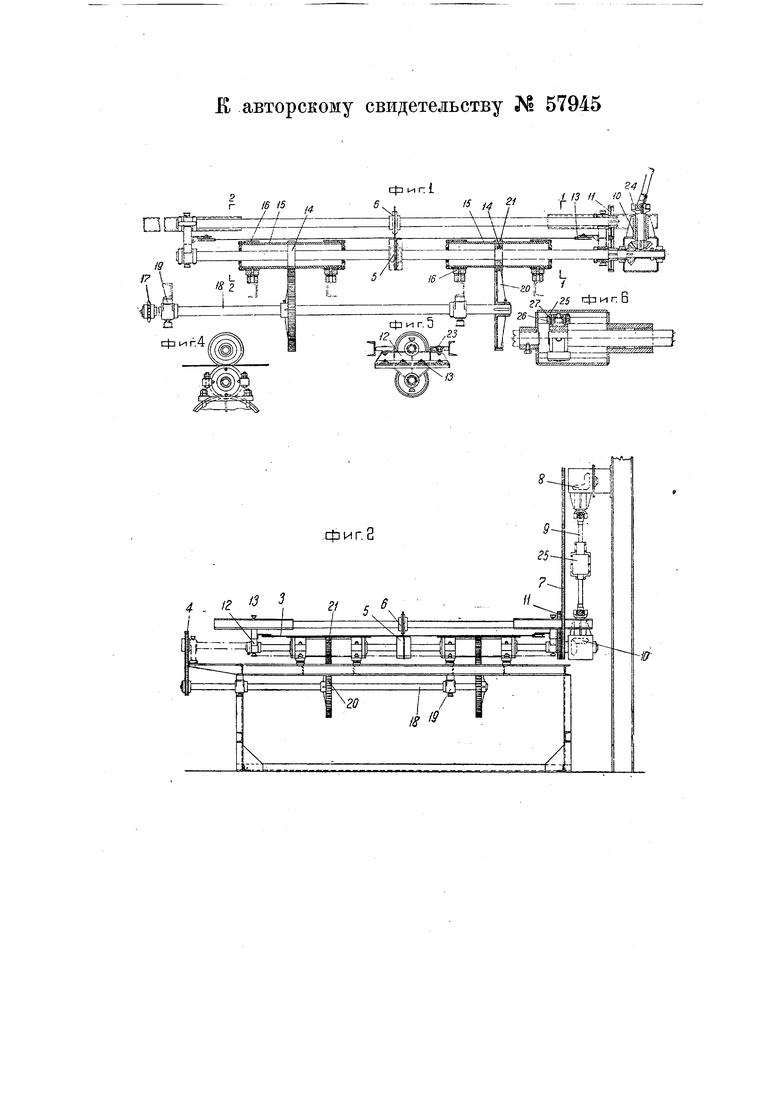
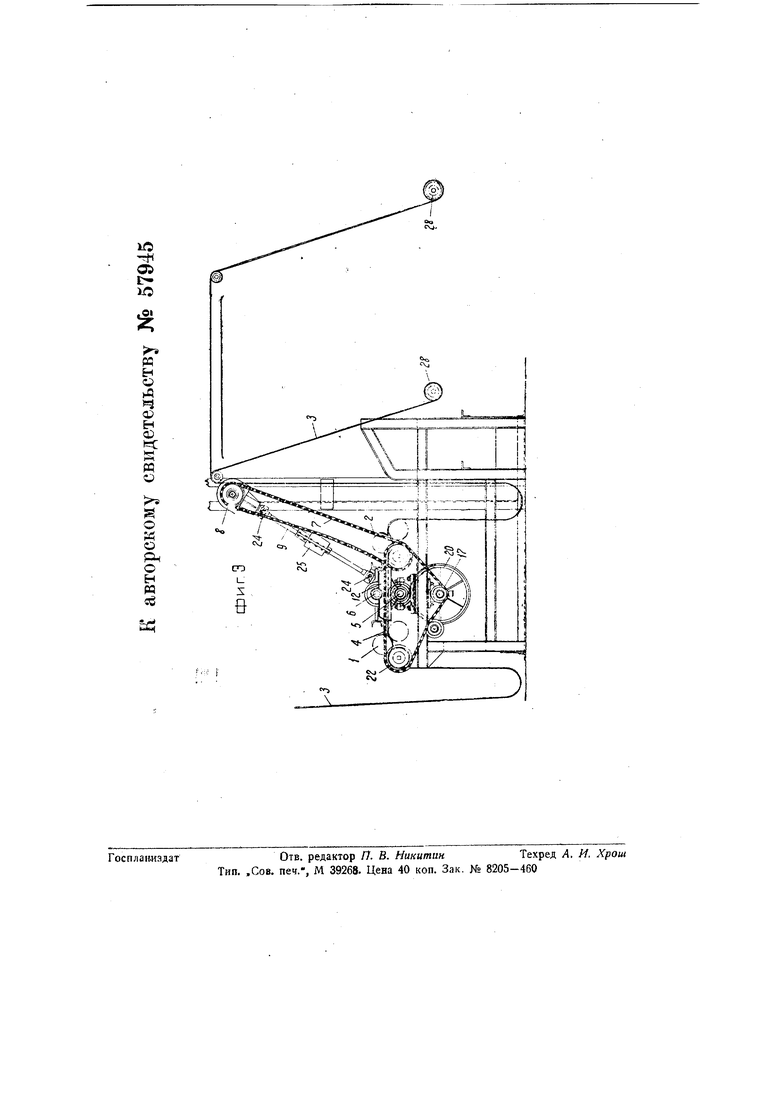
На фиг. 1 чертежа изображен предлагаемый аппарат в плане; на фиг. 2 и 3 - вид сбоку и спереди; на фиг. 4 и 5 - разрезы по /,/ и 2,2 на фиг, 1; на фиг. 6 - деталь телескопического устройства.
Разрезаемая вдоль лента 5 в месте установки ножей должна быть достаточно натянута. Это натяжение достигается тем, что как впереди, так и сзади ножей устанавливаются тройники J и 2.
Тройник / получает вращение от общего привода машины. От тройника / посредством, цепной передачи 4 получает вращение тройник 2. Вращение тройников / и 2 обеспечивает движение ленты, а также придает ей натянутое состояние.
Вращение ножей 5 и 6 осуществляется следующим образом: от тройника 2 посредством цепной передачи 7, конической передачи 8, карданного вала 9, конической передачи 10 вращение передается валу нижнего ножа 5. Вращение вала верхнего ножа 6 осуществляется зубчатой передачей JT.
Таким образом одновременно с движением ленты получают вращательное движение оба дисковых ножа.
Устройство аппарата, обеспечивающее ножам постоянное перемещение совместно с гуляющей лентой, заключается в следующем.
Вал нижнего ноиса 5 (фиг. 1) связан с валом верхнего ножа 6 двумя станинками 12, находящимися по краям валов. Эти станинки удерживают валы от взаимных смещений. Таким образом положение валов строго фиксировано. При работе мащины рубероидная лента зажата посредине дисковыми ножами 5 и б, а по обоим краям заключена в систему роликов 75. Лента проходит в середине между ребордами роликов. При соприкосновении ленты с роликами последние начинают вращаться, что уменьщает износ рубероидной ленты.
При появлении поперечного сдвига ленты она оказывает нажатие как на ролики /5 того края, в который направлено смещение ленты, так и на ножи, между которыми она посредине зажата. Естественно, что жесткости ленты было бы соверщенно недостаточно для того, чтобы своим нажимом сместить систему ножей с приводом к ним.
Однако, благодаря предлагаемому принципу устройства резательного
аппарата, жесткость рубероидной ленты вполне достаточна для того, чтобы переместить достаточно тяжелый механизм резательного аппарата, так как сопротивление боковому смещению тела, находящегося в движении, становится меньще во столько раз, во сколько раз абсолютная скорость движения тела больше скорости бокового перемещения.
Вся резательная часть опирается на раму мащины в двух точках посредством надетых на нижний ,вал ножа дисков 14.
Эти диски являются опорами, целиком передающими на раму вес подвижной части резательного аппарата. Однако указанные диски вращаются совместно с валом и имеют окружную скорость Vi. Эта скорость связана со скоростью вращения ножей и не может быть произвольно увеличена. Для увеличения окружной скорости опорной поверхности дисков стаканам 15, в которые заключены диски, сообщается вращательное движение в направлении, обратном направлению вращения дисков, с окружной скоростью V.
В результате получается, что поверхности дисков находятся в движении относительно опорной поверхности стаканов со скоростью, равной сумме скоростей: Vi-j-V Соверщенно ясно, что значение скорости У может быть выбрано любой величины.
Боковое перемещение ленты происходит с весьма незначительной скоростью УЗ.
Без сколько-нибудь заметной погрещности можно величину cos а - отнощение скорости бокового перемещения к абсолютной скорости движения заменить отнощением скорости бокового перемещения к скорости уносящего движения, т. е.
УЗ
cos а
1+
тогда сопротивление боковому перемещению подвижной части аппарата
будет следующим:
V,
Vi + V,
Для наглядности полученное уравнение иллюстрируется примером: Q - вес подвижной части
аппарата 150 кг
f- коэфициент трения стали по чугуну; поверхность шлифованидя и хорошо смазанная 0,10 кг
УЗ - скорость бокового
перемещения .... 0,1 MJceK 1/1-окружная скорость
дисков 0,4 „
УЗ - окружная скорость
стаканов 3,6 ,
тогда
0,1
,4 кг,
Р 150 ОД
и,4 + 3,6
т. е. для передвижения механизмов весом 15Q,K2 необходимо приложить усилие в 0,4 кг.
Осуществление указанного принципа достигается следующим образом.
Стаканы 15 (фиг. 1), шлифованные внутри и снаружи, вставляются каждый в два разъемных подшипника 16, в которых они могут свободно вращаться. Вращение стаканы получают следующим образом. Приводная цепь 4 (фиг. 3) охватывает звездочку 17 и приводит во вращение вал 18, ..опирающийся на два подшипника 19 (фиг. 2). На валу имеются также два зубчатых колеса 20, которые входят в зацепление с венцами 21 стаканов 15. Таким образом, стаканы приводятся во вращение с любой заранее выбранной скоростью, которая определяется передаточным отношением звездочек 22 и 77 и шестерен 20 и 21.
Вращение стаканов 15 обратно вращению дисков 14. В виду того, что две точки опоры (диски 14) не обеспечивают устойчивости подвижной части аппарата, по краям валов имеются упорные ролики 23, обеспечивающие вертикальное расположение ножей.
Привод для вращения вала нижнего ножа 5 осуществлен следующим образом. Источник движения - тройник 2 является неподвижным. Приводимый во вращение вал нижнего ножа имеет поперечное смещение (гуляние) вместе с рубероидной лентой, отклоняясь от своего среднего положения в ту или иную сторону. Вследствие указанного, передача к подвижному валу осуществлена посредством шарнира Гука (автомобильного кардана 24) (фиг. 1 и 3). Однако отклонение нижнего вала, а вместе с ним и нижнего кардана 24 приводит к изменению длины карданного вала 9. Для обеспечения изменения длины карданный вал 9 снабжен телескопическим приспособлением 25. Благодаря наличию в телескопическом приспособлении роликов 26 на шариковых подшипниках 27 сила трения при изменении длины вала является чрезвычайно незначительной величиной.
После разрезания ленты на две полосы каждая в отдельности направляется на отдельные намоточные барабаны 28.
Предмет изобретения.
1. Резательное устройство к рубероидным машинам, отличающееся применением надетых на нижний, подвижный и в поперечном направлении, вал ножа 5 опорных для всей конструкции дисков 14, заключенных в стаканы 75, приводимые во вращательное движение, обратное направлению вращения дисков.
2. При устройстве по п. 1 применение, с целью осуществления поперечного движения вала нижнего ножа 5, передачи посредством шарнира 24 и телескопического карданного вала 9. г Ш tS
1-4-г- -| и г; t 5./ / 
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗИРОВАННАЯ ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА РУБЕРОИДА | 1999 |
|
RU2165489C1 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ ДЕРНИНЫ, СТЕРНИ И НЕТОВАРНЫХ ЧАСТЕЙ С КОРНЕЙ В СОЛОДКОВЫХ АССОЦИАЦИЯХ | 2000 |
|
RU2179790C2 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ БОТВЫ КОРНЕПЛОДОВ НА КОРНЮ, ПРЕДПОЧТИТЕЛЬНО МОРКОВИ | 2004 |
|
RU2266634C1 |
| МАШИНА ДЛЯ КОНТУРНОЙ ЧЕКАНКИ ПОБЕГОВ ВИНОГРАДНОЙ ЛОЗЫ | 2024 |
|
RU2839884C1 |
| Машина для вырезания сердцевины плодов, например, перца | 1931 |
|
SU28725A1 |
| Устройство для изготовления спичечных книжек | 1931 |
|
SU44882A1 |
| КОМБИНИРОВАННАЯ ДИАГОНАЛЬНО-РЕЗАТЕЛЬНАЯ МАШИНА | 1970 |
|
SU274352A1 |
| Свеклоуборочная машина | 1984 |
|
SU1443787A3 |
| Диагонально-резательная машина | 1984 |
|
SU1199628A1 |
| Машина для стрижки волоса меховой овчины во влажном состоянии | 1990 |
|
SU1784653A1 |
-ф и г. 2
ю -ф о
Е
н о
А
CD
сс teC S М О
г
g О М
Рн
pq
ев
г ьм
