Изобретениеотносится к измерительной технике и может быть использовано в динамометрических устройствах различного назначения, в частности, для измерения сил на насадках при определении их гидродинамических характеристик: Известны измерительные преобразователи сил в электрический сигнал, содержащие упругие чувствительные элементы, в том числе и в виде упругих параллелограммов, перемещение подвижных звеньев которых преобразуется в электрический сигнал-с помощью различного вида преобразователей перемещения, в том числе н дифференциальных 11, 2, 3, 4. В ряде случаев объект, создающий измеряемую силу, например, обтекаемая потоком жидкости насадка (кольцевое.крыло), жестко связан с чувствительным упругим элементом, преобразователя. В этих условиях упругий элемент нагружен не только измеряемой силой, но и ее моментом, равным произведению силы на расстояние от точки ее приложения на объекте до упругого элемента. Поскольку точка приложения силы на объекте неизвестна, то неизвестно и расстояние, а следовательно, и величина неизмеряемого изгибающего момента, что исключает внесение поправки в получаемые результаты. Повьщ:ение точности измерений в этом случае может быть достигнуто за счет созданий преобразователей, реагируйщих на действие, только измеряемой силы. Наиболее близкими по те.хнпческой сущliocTH к изобретению являются преобразователи, в которых эта задача частично рещена, так как измеряемая сила передается на чувствительный элемент (консольную балочку) через упругий направляющий параллелограм- 1 и перпендикулярную его продольпой оси, гибкую в направлепиях действия псизмеряемых сил перемычку 5|. Однако втаком динамометре полностью не исключается влияние момента на результаты измерения. Как показали проведенные исследования, воздействие момента М яриводит к дополнительному смещению жесткого звепа упругого параллелограмма, и, следовательно, связанного с ним перемычкой чувствительного элемента в направлении действия измеряемой силы. В результате появляется .ощибка в измерении. Аналитическое выражение коэффициента влияния неизмеряемого момента имеет вид
&4MJ
- - th J-) +
о п 1 ff f. П
espj,- (1)
где f fVs7E3 - приведенная абсцисса текущего сечения балочки параллелограмма; М - момент (неизмеряемый), действующий на жесткое звено параллелограмма в той же плоскбёти, что и иЗмёряемая сила-;
С - расстояние от подвижной части параллелограмма до гибкой перемычки;
Р - измеряемая сила; 3) - моменты инерции сечения балочки относительно собственной оси и Ьтносительно продольной оси сим метрии параллелограмма;
S - сила, направленная вдоль балочки и равная м.рменту М , поделенному на расстояние между балочками.
Цель изобретения - повышение точности измерения уменьшения влияния
измеряемого момента силы на выходной сигнал.
Указанная цель достигается тем, что в измерительном преобразователе, содержащем направляющий и расположенный внутри него чувствительный упругиепараллелоТрШШы, Жесткие подвижные части которых соединены гибкой в направлении действия неизмеряемых сил перемычкой, ходоувеличительный рычажный механизм с упругими
шарнирными опорами рычага и дифференциальный преобразователь перемещения, упругий и чувствительный параллелограммы имеют общее основание,с которым через двухзвенный упругий шарнир связан рычаг ходоувёМчительного механизма, соединенный
дням концом с преобразователем перемещения, а другим - с жесткой подвижной частью чувствительного параллелограмма в
его центре через трехзвенный упругий шарнир, причем центр гибкой в направлении дейстШя нейзмеряемь1х сил перемычки расположен в центре направляющего параллелограмма.
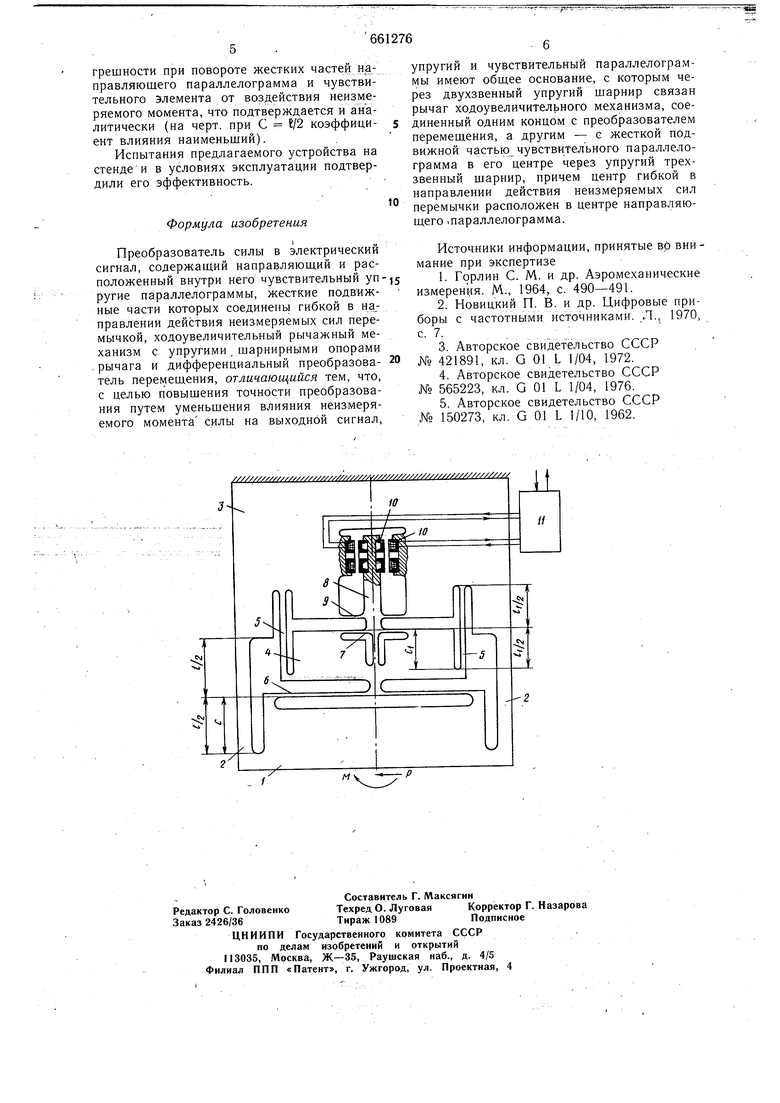
На чертеже изображена схема предлагаемого измерительного преобразователя
силы в электрический сигнал.
Измерительньц 1 преобраз&ватШГ Шдержит направляющий параллелограмм, который состоит из подвижного жесткого звена 1, упругих балочек 2 и основания 3. Внутрй н а п ра В л я ю щего ц и р а о граКгм и с и м метрично продольной оси расположен ч увствительный элемент; выполненный в форме упругОго параллелограмма и состоящий из подвижного жесткого звена 4, упругих бйлочек 5 и общего с направляющим параллелограммом основания 3. Подвижйые жесткие :звенья направляющего параллелограмма и
.чувствительного элемента объединены гибкой перемычкой 6. Перемычка размещена в поперечной плоскости симметрии упругих балочек Направляющего параллелограмма
5 (на черт, расстояние С /2). Жесткое звено чувствительного элемента связано через трехзвенный упругий шарнир 7 с рычагом 8, который опирается через двухзвенный упругий шарнир 9 на основание параллелограммов, образуя таким образом ходоувеличи тельный механизм. При этом центр поворо татрехзвённого Шарнира совмещен с точкой пересечения продольной и поперечной осей симметрии чувствительного элемента (на черт. С| -ti/2). Па свободном конце
15 рычага закреплена подвижная часть - два ферритовых сердечника без катушек индуктивности - магнитной системы 10 дифференциального преобразовательного элемента, а на основании параллелограммов размещена часть магнитной системы - два ферритовых
20 сердечника с катушка1у1И индуктивности, . электрически связанных с электронной схемой 11.
Преобразователь работает следующим образом.
22 Измеряемая сила Р, приложенная к жесткому звену 1 направляющего параллелограмма, передается через перемычку 6 на жесткое звено 4 чувствительного элемента и далее через трехзвенный шарнир 7 на рычаг 8 ходоувеличительного механизма. В
30 результате деформаций изгиба балочек 2 и 5 направляющего параллелограмма и чув: ствительного элемента, а также упругих звеньев шарниров 7 и 9 свободный конец рычага 8 смещается относительно основания 3. При этом один из воздушных зазоров в магнитной системе 10 увеличивается, а другой - уменьшается, и, как следствие, возникает изменение электрического сигнала на выходе электронной схемы 11 преобразователя, пропорциональное измеряемой
0 силе.
Благодаря тому, что чувствительный элемент выполнен в форме упругого параллелограмма, установленного внутри направляющего параллелограмма симметрично продольной оси и имеющего с последним общее ос5 нование, и применению ходоувеличительного механизма повышается жесткость полученной упругой системы в направлениях действия измеряемой силы и неизмеряемо гг) момента, а также уменьшаются по абQ солютной величине перемешения связанных
..- между собой гибкой перемычкой подвижных жестких звеньев направляющего параллелограмма и чувствительного элемента.
Размещением гибкой перемычки в поперечной плоскости симметрии балочек направляющего параллелограмма и совмещением центра поворота трехзвенного шарнира С точкой пересечения продольной и поперечной осей симметрии чувствительного элемента устраняются кинематические погрешности при повороте жестких частей направляющего параллелограмма и чувствительного элемента от воздействия неизмеряемого момента, что подтверждается и аналитически (на черт, при С /2 коэффициент влияния наименьший). Испытания предлагаемого устройства на стенде и в условиях эксплуатации подтвердили его эффективность. Формула изобретения Преобразователь силы в электрический сигнал, содержаший направляюший и расположенный внутри него чувствительный уп ругие параллелограммы, жесткие подвижные части которых соединены гибкой в на правлении действия неизмеряемых сил перемычкой, ходоувеличительный рычажный механизм с упругими , шарнирными опорами , рычага и дифференциальный преобразователь перемещения, отличающийся тем, что, с целью повышения точности преобразования путем уменьшения влияния неизмеряемого момента силы на выходной сигнал. упругий и чувствительный параллелограммы имеют общее основание, с которым через двухзвенный упругий шарнир связан рычаг хОдоувеличительного механизма, соединенный одним концом с преобразователем перемещения, а другим - с жесткой подвижной частью чувствительного параллелограмма в его центре через упругий трехзвенный шарнир, причем центр гибкой в направлении действия неизмеряемых сил перемычки расположен в центре направляющего .параллелограмма. Источники информации, принятые во внимание при экспертизе 1.Горлин С. М. и др. Аэромеханические измерения. М., 1964, с. 490-491. 2.Новицкий П. В. и др. Цифровые приборы с частотными источниками. Л., 1970, с. 7. 3.Авторское свидетельство СССР j4o 421891, кл. G 01 L 1/04, 1972. 4.Авторское свидетельство СССР № 565223, кл. G 01 L 1/04, 1976. 5.Авторское свидетельство СССР № 150273, кл. G 01 L 1/10, 1962.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный преобразовательСилы B элЕКТРичЕСКий СигНАл | 1979 |
|
SU815526A2 |
| Многокомпонентный стенд для измерения силомоментных нагрузок | 1989 |
|
SU1633296A1 |
| Буксировочный динамометр | 1978 |
|
SU787914A1 |
| Устройство для измерения сил на модели | 1980 |
|
SU1004795A1 |
| Многокомпонентный стенд для измерения силомоментных нагрузок | 1984 |
|
SU1174795A1 |
| Тензорезисторный динамометр осевой силы и крутящего момента | 1974 |
|
SU579548A1 |
| Тензометрические весы для испытания моделей грибного винта | 1976 |
|
SU657265A1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1995 |
|
RU2111464C1 |
| Устройство для измерения усилий и крутящего момента крыльчатых движителей | 1975 |
|
SU517816A1 |
| ДАТЧИК ДАВЛЕНИЯ | 1995 |
|
RU2082128C1 |
