(54) РЕГУЛЯТОР МОЩНОСТИ ПАРОВОЙ ТУРБИНЫ
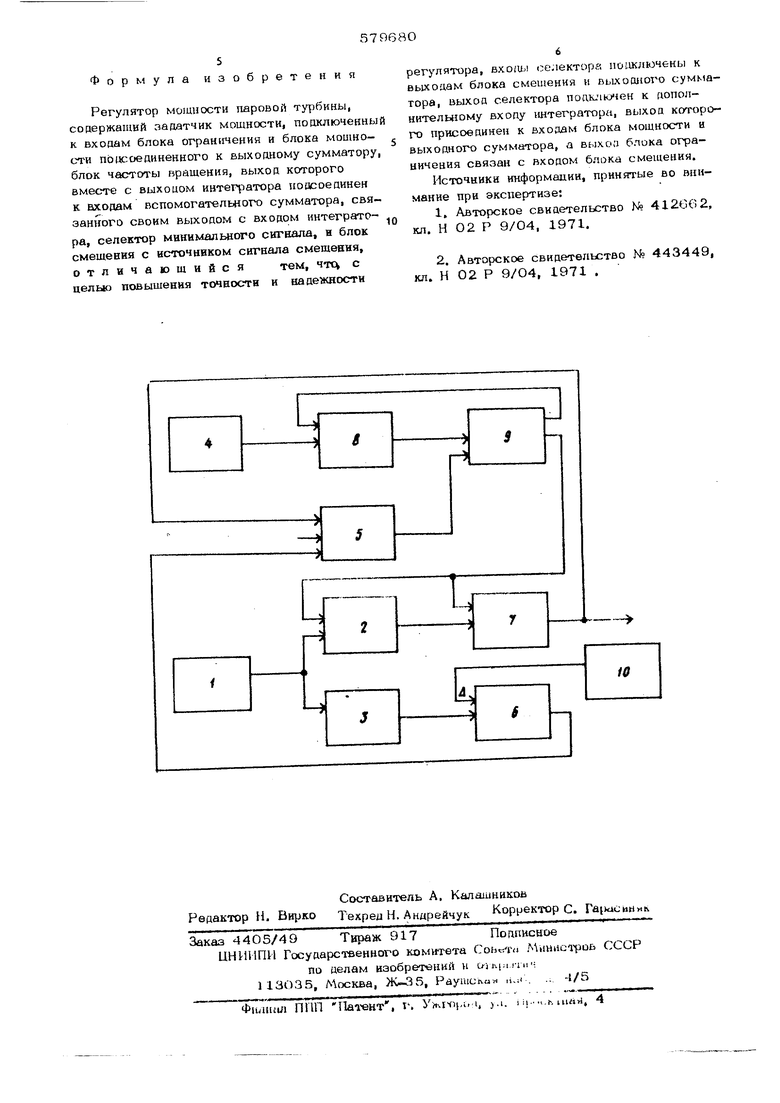
Выход аадатчика мощности 1 соединен t; вхопами блока мощности 2 и блока ограничения 3. Выход блока мощности 2 соецинен с входом выходного сумматора 7. Входы селектора 5 присоединены к выходу блока смешения 6 сигнала и к выходу выходното сумматора 7, Выход селектора 5 coenmieH с первым входом ; интегратора 9, второй вход интегратора 9 соединен с вььх(Лом вспомогательного сумматора 8, вход которого соединен с выходом блока 4 частоты вращения. Выход интегратора 9 соединен с входом выходного сумматора 7 и с входом блока мощности. Входы блока 6 присоединены в выходу блока 3 ограничения мощности и к выходу источника 10 сигнала смещения.
БЦОКИ 2,3 (получают обшее (одинаковое) задание от задатчшса 1 и формируют сигналы управления мощностью агрегата. Блок 3 по сравнению с блоком 2 обеспеч шает более быстродействующееуправление. Блок 4 формирует алгоритм управления частотой вращениЯдагрегата. Через вспомогательную следящую систему , (составленную вспомогательным сумматором 8 и интегратором 9) он присоединен ко входу выходного сумматора 7. Кроме , выход этой вспомогательной следящей системы через блок мощности 2 присоединен ко второму входу выXодного сумматора 7. Управление через первый вход выходного сумматора 7 обеспечивает пропорциональное регулирование частоты вращения, а через второй вход коррекцию статической характеристики в
устаноВ1Шшихся режимах, т.е. строгую пропорциональность частоты и мощности в установивщеМся режиме. Быстродействующий канал управления мощностью замыкается через блок 6 смещения сигнала, селектор 5 и интегратор 9. Селектор выделяет из нескольких сигналов управления, действующих на его входах, минимальный (наиболее отрицательный) сигнал, который проходит на Выход селектора.
В нормальном режиме селектор 5 заперт и его выходной сигнал равен нулю. Запирание селектора обеспечивается сигналом постоянного смещения, вырабатываемым источ НИКОМ сигнала смещения. Регулирование
мощности осуществляется через за датчик 1, блок 2 и выходной сумматор 7, а регулирование частоты - через блок 4, вспомогателы1Ый сумматор 8, интегратор 9, выходной сук матор (7 и блок 2. Скорость изменения MOiUHocTH агрегата определяется ве;1ичиной задания, вырабатываемого задатчиком 1 и аинамич€к;кими харакгерис тиками блока
MuiUHDCTH 2, ТрСбуОТСЯ быстро paCUJiyviKTb aipevai, cotnbeR.abybJiLiHfi сигнал по-
ступает с зацатчикп 1. На tu.ixout- lua.h.i при этом образу(гс:я сигнал, iiLx iaiuiiibiH для отпирсшия селектора.
Итеграгор 9 обе спечивает плавн(ють переютючения каналов управления, mx--KOiii,Ky его выходная величина не может изменит1 ;н мгновенно. В то же время т-лубокая обратная связь через вспомогательный сумматог) 8 обеспечивает прохождение с блока 4 на выход интегратора 9 практически без временной задержки. Отпирание селектора пр1шодит к изменению состояния интетратора 9 и прохождению сигнала управления от селектора на выходной сумматор 7. Коэффициент передачи от селекюра 5 на вход интегратора 9 выбирается во много раз большим чем коэффициент передачи от вспомогател1зного сумматора 8. Поэтому отпирание селектора означает по существу блокировку основного канала и передачу управления тому каналу, который в данный момент замыкается через селектор. Чтобы резко возросшее усиление не привело к потере устоГгчивости, предусмотрена связь выхода выходного сумматора 7 со входом селектора. Эта обратная связь проходит на выхор селектора лИ1иь тогда, когда селектор не заперт. На входы селектора могут быть по- дашл также дру1Ч1е сш-налы yiipaiwb.-iuHi, например о достижении предельно допусч имых режимов работы, сигнал регулятора давления свежего пара, сигналы защит, требующие ограничения или снижения нагрузки и т.п. Управление передается одному из нескольких включенных параллельно каналов. Приоритет принадлежит тому, каналу, чей сигнал в данный момент наименыиий. Указанное включение селектора обеспечивает значительное расщирение функциональных возможностей регулятора.
Процесс быстрого сн1гжения (ограничения мошнисти заканчивается после запирания селектора н астатической отработки остающейся ошибки основной системой регулировани я мощности (через блок 2). Велич ша, характеризующая зону нечувствительности селектора, выбирается близкой к величине статической ощнбки канала ограничения мощности. Сигналы у11равлення, поступающие с задат чика 1, ecjiii, они меньще этой величины, проходят только через основной канал регулирования мощности.
Данная структура регулятора обеспечивае пр1ютоту и еципообразие ввода задания и технологи чес; кпх ограничений нагрузки агрегата noBi,iiiieuue тичцости уп(;авлення, плавное, без толчков, переключение каналов упраилепии, lOBi.iiiieiiiie надежности. обретения о р м у л а Регулятор мощности паровой турбины, содержащий заоатчик мощности, поцключенны к входам блока ограничения и блока мощности по «соединенного к выходному сумматору блок частоты вращения, выход которого вместе с выхоцом интегратора подсоединен к входам вспомогательного сумматора, связанного своим выходом с входом интегратора, селектор минимального сигнала, н блок смещения с источником сигнала смешения, отличающийсятем, чтсу с целью повышения точности и надежности регулятора, вхо№ «селектора поцключены к выходам блока смещения и выходного сумматора, выход селектора поак.чючен к дополнителышму входу 1щтегратора, выход которого присоединен к входам блока мощности и выходного сумматора, а выхоа блока ограничения связан с входом блока смещения. Источники информации, принятые во внимание при экспертизе: 1,Авторское свидетельство hJ 412662, кл. Н 02 Р 9/04, 1971. 2.Авторское свидетельство № 443449, кл. Н 02 Р 9/04, 1971 .
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ ЭНЕРГОУСТАНОВКИ | 2007 |
|
RU2341690C1 |
| Устройство для группового автоматического управления частотой и активной мощностью агрегатов гэс | 1978 |
|
SU750649A1 |
| Устройство для автоматического управления мощностью тепловой электростанции | 1984 |
|
SU1239828A1 |
| Способ резервирования электрогидравлической системы регулирования частоты вращения и устройство для его осуществления | 1983 |
|
SU1174579A1 |
| Групповой регулятор активной мощности гидроэлектростанции | 1979 |
|
SU782118A1 |
| Способ регулирования энергетической установки | 1989 |
|
SU1758260A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА ДЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2006 |
|
RU2322601C1 |
| Устройство для автоматического управления мощностью тепловой электростанции | 1985 |
|
SU1279016A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2172419C1 |
