(54) ДАТЧИК ПЕРЕМЕЩЕНИЯ
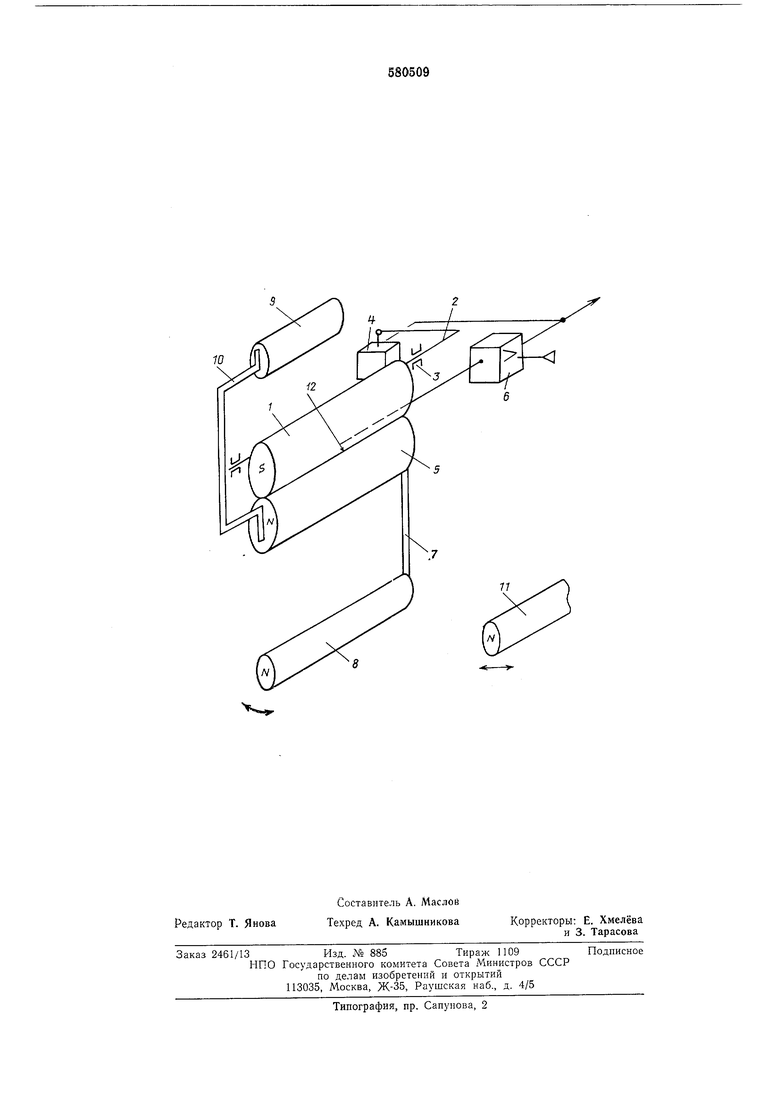
ных полюсов которого совпадает с ориентацией магпитпых полюсов чувствительного элемента (на чертеже не показан), размеш енного в корпусе 5. Вес магннта 8 частично уравновешен противовесом 9, закрепленным при помощи рычага 10 к корпусу 5. Источником перемещения системы, состоящей из корпуса 5 и магнита 8, является магнит 11. На боковой поверхности корпуса 1 имеется сонло 12, канал которого соединен с усилителем 6.
Датчик работает следующим образом.
При приближении магнита 11 к магниту 8 последний поддействием взаимно отталкивающих сил отклоняется от вертикали, перекатывая корпус 5 по корпусу 1 взаимно сопряженными новерхностями, где находится сонло 12, в результате чего прикрывается выходное отверстие сопла 12 и повышается давление на узле 4 обратной связи и усилителе 6. Под действием обратной связи базовый корпус 1 поворачивается иа угол, обеспечивающий первоначальное открывание сопла 12, а так как с ним фрикциоино зацеплен корпус 5, то последний нрокатывается в иротивоиоложную сторону, возвращая магнит 8 в положение, близкое к нервоначальному, где и ионадает в равновесное состояние, при котором результирующая от смещения от вертикальной плоскости центра тяжести система, состоящая из магнита 8, корпуса 5 и противовеса 9, удаленная на долю эксцентриситета от магиита 11, уравновешивается воздействием магнита 11.
Процесс длится до тех пор, пока кори)с 5 полностью не прикрывает выходное отверстие сопла 12. Максимальное отклонение магиита 8 от вертикальной плоскости равно углу поворота базового корпуса 1 под действием узла 4 обратной связи и величине эксцентриситета, если не учитывать дополнительного угла поворота системы для полного прикрывания выходиого отверстия сопла 12 без действия обратиой связи.
Высокая чувствительность и точность датчика обеспечиваются уравновешиванием части
веса магнита 8, что определяет порог чувствительности датчика; небольшими усилиями смещения кориуса 5 магнитом 8, так как последний смещает центр тяжести корпуса 5 по принципу рычага, точкой опоры которого служит трение скольжения сопряженных поверхностей корпусов 1 и 5; большой площадью взаимодействия магнитных нолей магнитов корпуса 5 и 8 с магнитом 11; вьпюсом взаимодействующих магнитов 8 и 11 из зоны сильного магнитного поля магнитов корпуса 1 и 5.
Формула и 3 о б р е т е н н я
1. Датчик перемещения по авт. св.
496494, отличающийся тем, что, с целью повышения точности, он содержнт дополнительный магннт, который жестко укреплен посредством рычага на свободно нодвешенном корнусе чувствительиого элемента.
2. Датчик по п. 1, отличающийся тем, что дополнительный магнит расположен параллельно оси чувствительного элемента и имеет одинаковую с ним ориентацию магнитных полюсов.
3. Датчик по п. 1, отличающийся тем, что, с целью повышения чувствительности, он содержит противовес, который жестко укреплен посредством рычага на свободно подвешенном корпусе чувствительного элемента с
противоположной стороны от дополнительного магнита.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство № 496494, кл.
G 01Р 13/00, 1974.
77
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК КОНТРОЛЯ ПОТОКА (ВАРИАНТЫ) | 2010 |
|
RU2461009C2 |
| КОНЦЕВОЙ ВЫКЛЮЧАТЕЛЬ | 1971 |
|
SU293301A1 |
| ДАТЧИК КОНТРОЛЯ ЦЕЛОСТИ ЦЕПЕЙ ДВУХЦЕПНОГО СКРЕБКОВОГО КОНВЕЙЕРА | 1970 |
|
SU275956A1 |
| Пневматический бесконтактный выключатель | 1973 |
|
SU455282A1 |
| ТРЕХКОМПОНЕНТНАЯ МАГНИТНАЯ ВАРИАЦИОННАЯ СТАНЦИЯ | 1964 |
|
SU166506A1 |
| ПНЕВМАТИЧЕСКИЙ ДАТЧИК УРОВНЯ | 1972 |
|
SU326456A1 |
| Корректор характеристик постоянных магнитов | 1978 |
|
SU731407A1 |
| Преобразователь углового положения объекта | 1982 |
|
SU1067358A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2001 |
|
RU2207522C2 |
| Датчик положения ротора вентильногоэлЕКТРОдВигАТЕля | 1979 |
|
SU819894A2 |