Г
Изобретение относится к машиностроению, а именно, к копирующим манипуляторам, устанавливаеьвлм в рабочих камерах, отделенных от оператора герметичной перегородкой.
Известен копирунмций манипулятор, содержащий задающий орган и отделенный от него герметичной перегородкой исполнительный орган.Привод всех движений исполнительного органа осущест вляется магнитными муфтами l.
При мрнтаже и демонтаже этого манипулятора оператор должен присутстввать в рабочей зоне.
Наиболее близок к предлагаемому изобретению копирующий манипулятор, содержащий задающий орган и отделенный от него герметичной перегородкой исполнительный орган, корпус которого соединен с основанием элементами центрирования, фиксации положений и крепления, и электромагнитный привод р.
Известный манипулятор для монтажно-демонтажных работ требует вспомогательного устройства, что усложняет его обслуживание и снижает его надежность в работе из-за возможного повреждения элементов электрических соединений.
Цель изобретения - упрощение монтажно-демонтажных работ и повышение надежности манипулятора в работе.
Для этого в предлагаемом манипуля торе корпус исполнительного органа снабжен выдвижными упорами, кинематически связанными с элементами крепления, и телескопическим валом, на конце которого смонтированы опорная тяга и ведомая полумуфта привода.
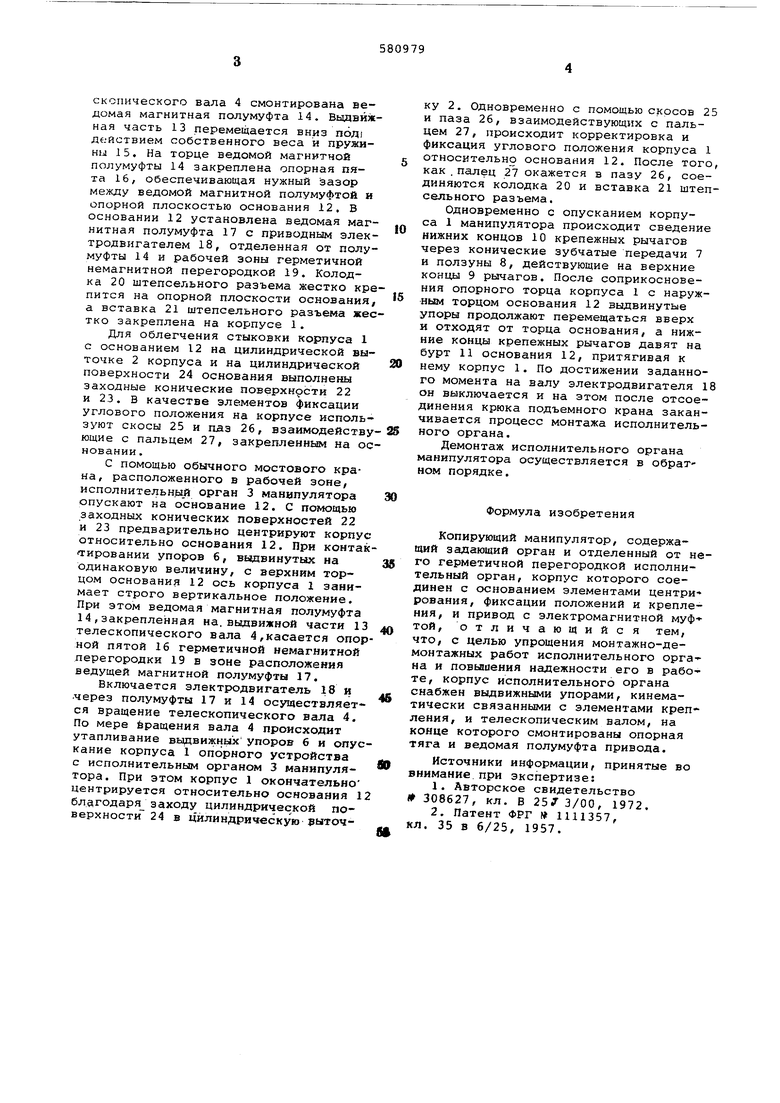
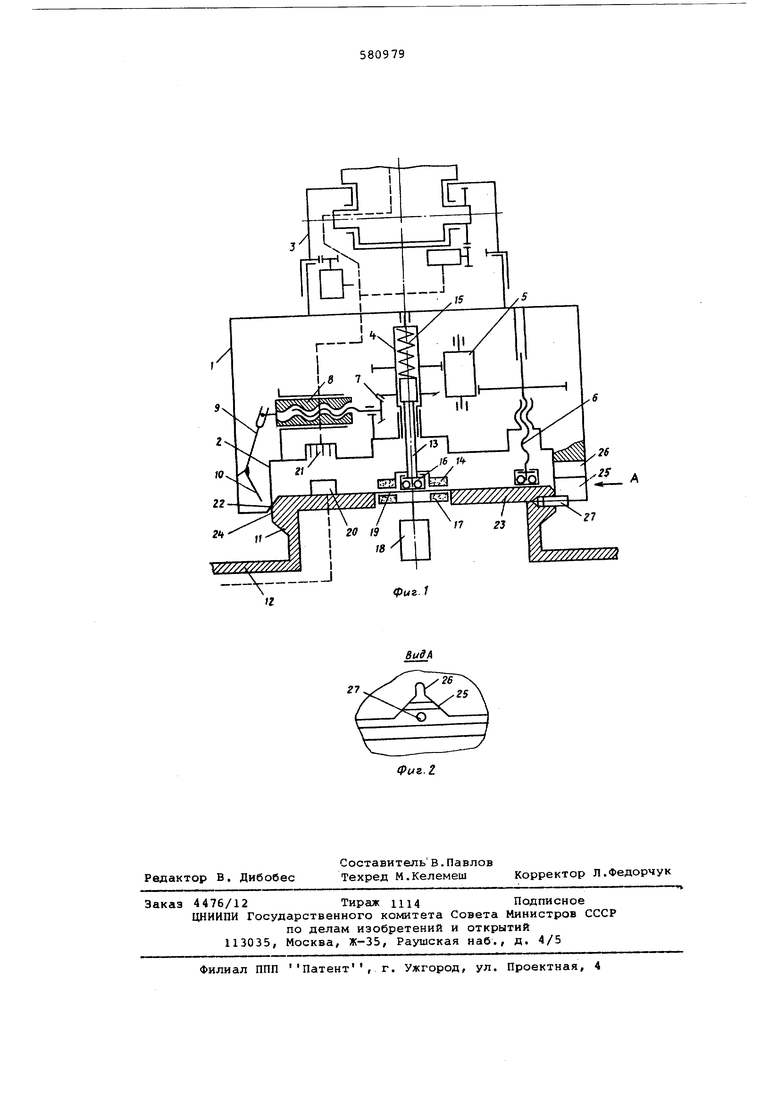
На фиг. 1 дана схема манипулятора на фиг. 2 - вид по стрелке А на фиг,1
Копирующий манипулятор состоит из задающего органа (на чертеже не показан) и отделенного от него герметичной перегородкой исполнительного органа. На корпусе 1 с цилиндрической выточкой 2 закреплен исполнительный орган 3 с встроенными электродвигателями . По центральной оси корпуса 1 смонтирован телескопический вал 4, кинематически связанный через широкие зубчатые колеса 5 с тремя выдвинутыми упорами 6, равномерно расположенными по окружности и череэ. конические зубчатые передачи 7 и ползуны 8 - с верхними концами 9 крепежных рычагов, контактирующих своими нижними концами 10 с буртом 11 основания 12. На вьадвижной части 13 телескопического вала 4 смонтирована ведомая магнитная полумуфта 14. Выдвижная часть 13 перемещается вниз п6д| ле-йствием собственного веса и пружины 15. На торце ведомой магнитной полумуфты 14 закреплена опорная пята 16, обеспечивающая нужный зазор между ведомой магнитной полумуФтой и опорной плоскостью основания 12, Б основании 12 установлена ведомая магнитная полумуфта 17 с приводным электродвигателем 18, отделенная от полумуфты 14 и рабочей зоны герметичной немагнитной перегородкой 19. Колодка 20 штепсельного разъема жестко крепится на опорной плоскости основания, а вставка 21 штепсельного разъема жестко закреплена на корпусе 1.
Для облегчения стыковки корпуса 1 с основанием 12 на цилиндрической выточке 2 корпуса и на цилиндрической поверхности 24 основания выполнены заходные конические поверхности 22 и 23. в качестве элементов фиксации углового положения на корпусе используют скосы 25 и пдз 26, взаимодействующие с пальцем 27, закрепленным на основании.
С помощью обычного мостового крана, расположенного в рабочей зоне/ исполнительный орган 3 манипулятора опускают на основание 12. С помощью заходных конических поверхностей 22 и 23 предварительно центрируют корпус относительно основания 12. При контактировании упоров 6, выдвинутых на одинаковую величину, с верхним торцом основания 12 ось корпуса 1 занимает строго вертикальное положение. При этом ведомая магнитная полумуфта 14,закрепленная на, выдвижной части 13 телескопического вала 4,касается опорной пятой 16 герметичной немагнитной перегородки 19 в зоне расположения ведущей магнитной полумуфты 17.
Включается электродвигатель 18 и .через полумуфты 17 и 14 осуществляется вращение телескопического вала 4. По мере бращения вала 4 происходит утапливание вьщвижных упоров 6 и опускание корпуса 1 опорного устройства с исполнительным органом 3 манипулятора. При этом корпус 1 окончательно центрируется относительно основания 1 благодаря заходу цилиндрической поверхности 24 в цилиндрическую 9ЫТОЧку 2. Одновременно с помощью скосов 25 и паза 26, взаимодействующих с пальцем 27, происходит корректировка и фиксация углового положения корпуса 1 относительно основания 12. После того, как . палец 27 окажется в пазу 26, соединяются колодка 20 и вставка 21 штепсельного разъема.
Одновременно с опусканием корпуса 1 манипулятора происходит сведение
0 нижних концов 10 крепежных рычагов через конические зубчатые передачи 7 и ползуны 8, действующие на верхние концы 9 рычагов. После соприкосновения опорного торца корпуса 1 с наруж5ным торцом основания 12 вьщвинутые упоры продолжают перемещаться вверх и отходят от торца основания, а нижние концы крепежных рычагов давят на бурт 11 основания 12, притягивая к
0 нему корпус 1. По достижении заданного момента на валу электродвигателя 18 Он выключается и на этом после отсоединения крюка подъемного крана заканчивается процесс монтажа исполнительного органа.
Демонтаж исполнительного органа манипулятора осуществляется в обратном порядке.
Формула изобретения
Копирующий манипулятор, содержащий Зс1Дающий орган и отделенный от него герметичной перегородкой исполнительный орган, корпус которого соединен с основанием элементами центри- рования, фиксации положений и крепления, и привод с электромагнитной муф той, отличающийс я тем, что, с целью упрощения монтажно-демонтажных работ исполнительного органа и повышения надежности его в работе, корпус исполнительного органа снабжен выдвижными упорами, кинематически связанными с элементами крепления, и телескопическим валом, на конце которого смонтированы опорная тяга и ведомая полумуфта привода.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство
О 308627, кл. В , 1972.
2.Патент ФРГ 1111357, кл. 35 в 6/25, 1957.
puz. 1