(54) МАНИПУЛЯТОР


| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Привод захвата манипулятора | 1975 |
|
SU521128A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Манипулятор | 1984 |
|
SU1240581A2 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Камнерезная машина | 1988 |
|
SU1559166A1 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| Привод захвата манипулятора | 1973 |
|
SU547335A1 |
| ЛЕНТОЧНЫЙ ТРАНСПОРТЕР, СОСТАВЛЕННЫЙ ИЗ ТЕЛЕСКОПИЧЕСКИ ВЫДВИЖНЫХ СЕКЦИЙ | 1935 |
|
SU50059A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
I
Изобретение относится к облаоги машино- сгроения, в частности к манипуляторам,
Известен манипулятор, состоящий из задающего и исполнительного органов с приводами их звеньев гибкими тяговыми элементами. .
Недостатком известного манипулятора является снижение, жесткости вследствие имеющего место постоянного ослабления тросовой передачи, что ведет к частой подналадке;сисгемы приводов в манипуляторе, а необходимое натяжение тросов на роликах йриБОДит к излишним энергетическим потерям, что снижает к.п.д. и ухудшает чувствительность манипулятора.
Предлагаемый манипулятор отличается of известных тем, что каждый гибкий тяговый элемент выполнен в виде пластинчатой цепи одностороннего изгиба, кинематически связанной с элементами привода и установленной в направляющих, расположенных на ее прямолинейных участках со CTOpoHia, обра-т- ной , для двусторонней передачи тягового уси;шя.
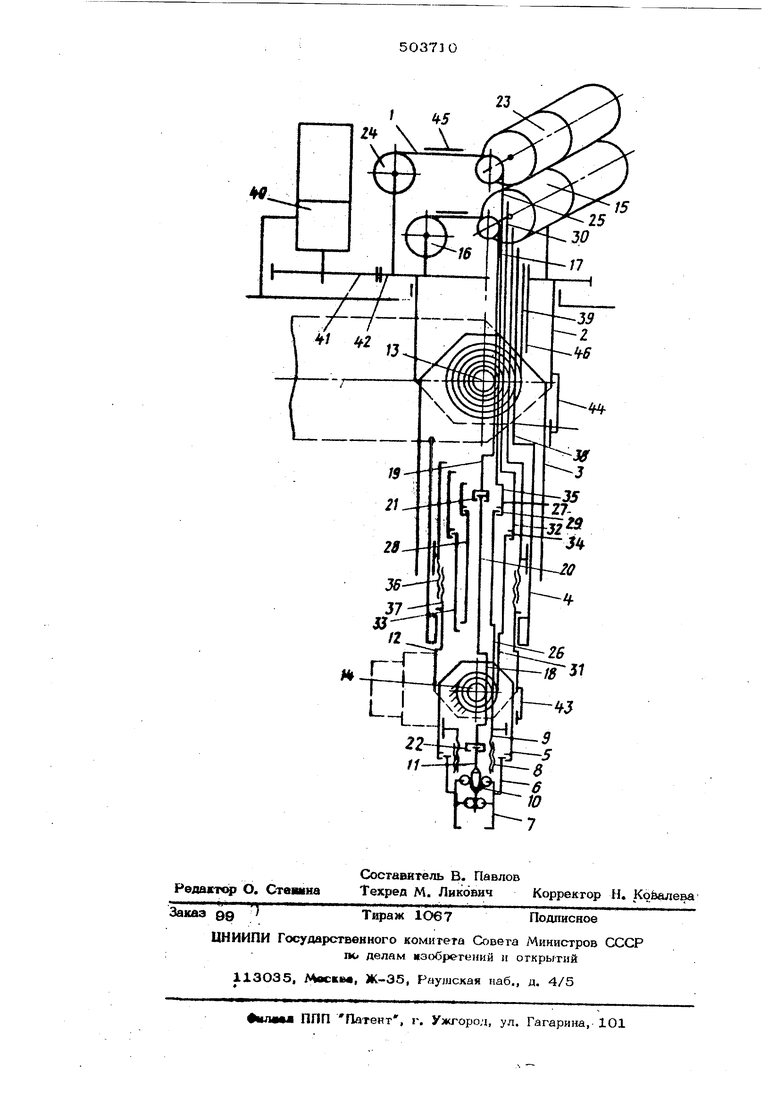
1 На чертеже показана кинематическая схема исполнительного органа предлагаемого манипулятора.
Манипулятор состоит из задающего (на чертеже не показан) и исполнительного органа на семь движений с приводом их зве;ньев гибкими тяговыми элементами 1 (для |упрющения показаны приводы только для 1го, 2-го и 7-го движений).
Исполнительный орган манипулятора соi держит поворотный корпус 2, телескопичеоки раздвижное звено, состоящее из основной трубы 3 и выдвижной трубы. 4, и кистевое звено 5.
На поворотном стакане 6 кистевого звена смонтированы захватные рычаги 7 и закреплена гайка 8, взаимодействующая без самоторможения с винтом 9, имеющим возможность перемещения вдоль оси кистевого звена. Качание захватных рычагов «существ/шется копиром 10, переметаемым вдоль своей оси тягой 11.
Внутри выдвижной трубы 4 смонтирована поворотная вилка 12, служащая опорой . .для кистевого звена 5. Поворотный корпус |2°шарш1рно соединен с основной трубой 3 с помощью оси 13, а поворотная вилка 12 с кисгевым эвеном 5 - осью 14. На осях 13 1 14 установлены звездочки, несущие цепи. Привод l-ro движения (управления зах-« ваггными рычагами 7) содержит двигатель с редуктором- 1,гяряемный барабан 16, свободно усгановленный на оси, цепи однот стороннего изгиба 17 и 18, стержень 19 :и стержень 20. Стержни 19 и 20 соедине :ны вращающейся опорой 21, допускающей шс относительное вращение и обеспечивающей их беззазорное соединение в осевом направ лении. Цепь одностороннего изгиба 18 соединена с тягой 11 копира 1О такой же вращающейся опорой 22. Привод 2-го движения (вращение кистеБого звена 5) содер йгт двигатель с ре гктором 23, приемный 24, цепи одностороннего изгиба 25 и 26, трубы 27 и 28, соединенные вращающейся опорой 29, удер шваемый. от вращения относительно корпуса кистевого звена 5 винт 9, взаимодействующий с гайкой 8, жестко скрепленной с поворотным стаканом 6. Привод 3-го движения (изгиб кисти 5) содержит двигатель с редуктором и приемный барабан (на чертеже не показаны), цепи одностороннего изгиба 30 и 31, трубы 32 и 33, соединенные вращающейся опорой 34 Цепь одностороннего изгиба 31 своим нижним концом жестко скреплена со звездочкой, в свою очередь жестко скрепленной с корпусом кистевого звена 5. Привод 4-го движения (вращение вилки 12 относгтельно продольной оси) содержит двигатель с редуктором и приемный барабан (на чертеже не показаны), цепь одностороннего изгиба 35, жестко скрепленную с трубой, имеющей гайку 36 на конце. Гайка 36 удерживается от вращения относительно корпуса выдвижной трубы 4 и взаимодействует без самоторможения с винтом 37, жестко скрепленным с корпусом вилки 12. Привод 5-го движения (продольное перемещение трубы 4 относительно трубы 3) содержит двигатель с редуктором, прием- ный барабан ( на чертеже не показаны ) и цепь 38 односторондег-о изгиба, жестко соединенную с трубой 4. Привод 6-го движения (изгиб телескопического звена) содержит двигатель с редуктором и приемный барабан (на чертеже не показаны) и цепь 39 одностороннего изгиба своим нижним концом .есгко скрепленную со звездочкой, в ч)чо;редь жестко скрепленной с трубой 3, Привод 7-го движения (в{эащение манипулятора) содержит двигатель с редуктором 40 и зубчатые колеса 41 и 42, Изгиб кистевого звена 5 ограничивается упором 43, а изгиб телескопического эвенаупором 44. Благодаря тому, что цепи могут иэги баться только в одну сторону, а их конечные звенья прикреплены к стержням и трубам жестко, без возможности щарнирного изгиба, дополнительные меры по предотвращению изгиба цепей в нежелаемом направлении необходимы только на участках между приемными барабанами и звездочками выходных валов приводных редукторов, где с этой целью установлены прямолинейные направляющие 45, и на участках между звездочками выходных валов приводных редукто ° « звездочками, сидящими на оси 13, где установлены направляющие 46. Манипулятор работает следующим обра.эом. При включении двигателя с редуктором 15 перемещаются цепь 17, жестко скрепленный с ее нижним звеном стержень 19, стержень 2О, соединенный со стержнем 19 вращающейся опорой 21, цепь 18, жестко соединенная своими крайними звеньями со стержнем 20 и вращающейся опорой 22, и, наконец, копир 10 с тягой 11. При перемещении копира 10 происходит сведение или разведение захватных рычагов 7. При изгибе манипулятора в кистевом или плечЪвомсуставе цепи 17 и 18 изгибаются только в местах огибания соответствующих звездочек, оставаясь прямолинейными на свободных участках благодаря тому, что их конечные звенья жестко скреплены со стержними и предусмотрена прямолинейная направляющая 46 (на схеме направляющая 46,показана только для цепи 39). При включении двигателя с редуктором 23 перемещаются цепь 25, трубы 27 и 28, соединенные вращающейся опорой 29, цепь 26 и винт 9. Осевое перемещение винта 9, удер киваемого от вращения относительно корпуса, вызывает вращение гайки 8 благодаря тому, что винтовая пара выполнена без самоторможения (с большим углом подъема). Совместно с гайкой 8 начинает врашаться стакан G с захватными рглчагами 7 и копиром 10. Перемещением цепи 30, труб 32 и 33 и цепи 31, своим нижним звеном жестко скрепленной со овездочлой изгиба кистевого звена 5, вращают звездочку, чем досгигают изменения угла изгиба кистевого ЗБв-.
на.
Перемещением цепи 35 и трубы с гайкой 36 вращают винт 37, а вместе с ним и вилку 12 с закрепленным на ней кистевым звеном.
С перемещением цепи 38, своим нижним звеном жестко соединенной непосредственно ;с вьщвижной трубой 4, изменяется длина телескопически раздвижного звена.
Перемещением цепи 39, своим нижним звеном жестко соединенной со звездочкой изгиба телескопического звена, осуществляют поворот звездочки вокруг оси 13, чем изменяю т угол изгиба телескопического зве-15 Включая двигатель с редуктором 4О, закрепленный на неподвижном основании, осуществляют поворот корпуса 2, а следовательно, и всего манипулятора. Перемещение цепей 17 и 25 может производиться независимо от других движений. При перемещении цепи ЗО и изгибе кистевого звена следует дополнительно перемешать цепи 17 и 25 с тем, чтобй компенсиро- вать изменение длин цепей 18 и 26, вызываемое огибанием соответствующих звездочек. Перемещение цепи 35 может производиться независимо от других движений. С перемещением цепи 38, для компенсации изменения расстояния между осями 13 и 14, следует производить дополнительно такие же перемещения цепей 17, 25, 30 и 35. При перемещении цепи 39 и изгибе телескопически раздвижного звена следует дополнительно перемещать цепи 17, 25, 30, 35 и 38 с тем, чтобы компенсировать
изменение длин этих цепей, вызываемое огибанием ими соответствующих звездочек.
Компенсирующие перемещения цепей осуществляются автоматически извес -ным
способом с помощью датчиков положения, которые подают сигналы на поворот на необходимый угол соответствующих электродвигателей.
Вращение всего манипулятора может со-
вершаться независимо. При этом все осталь ные двигатели с редукторами и приемными ;барабанами вращаются вместе с ним.
При работе каждого из двигателей свободный участок цепи наматывается или сматывается с соответствующего барабана, Благодаря тому, что конечные звенья |Цепей закреплены на барабанах жестко и ;предусмотрены прямолинейные направляю;щие 45, цепи поворачивают барабаны, одно|временно наматываясь на них. Задающий орган манипулятора выполнен аналогично. Формула изобретения Манипулятор, состоящий из задающего и исполнительного органов с приводом их звеньев гибкими тяговыми элементами, отличающийся тем, что, с целью повышения чувствительности и надежности, каждый гибкий тяговый элемент выполнен в :виде пластинчатой цепи одностороннего изгиба, кинематически связанной с элементами привода и установленной в направляющих, расположенных на ее прямолинейных участ ках со стороны, обратной изгибу, для дву- торонней передачи тяговогчэ усилия.
