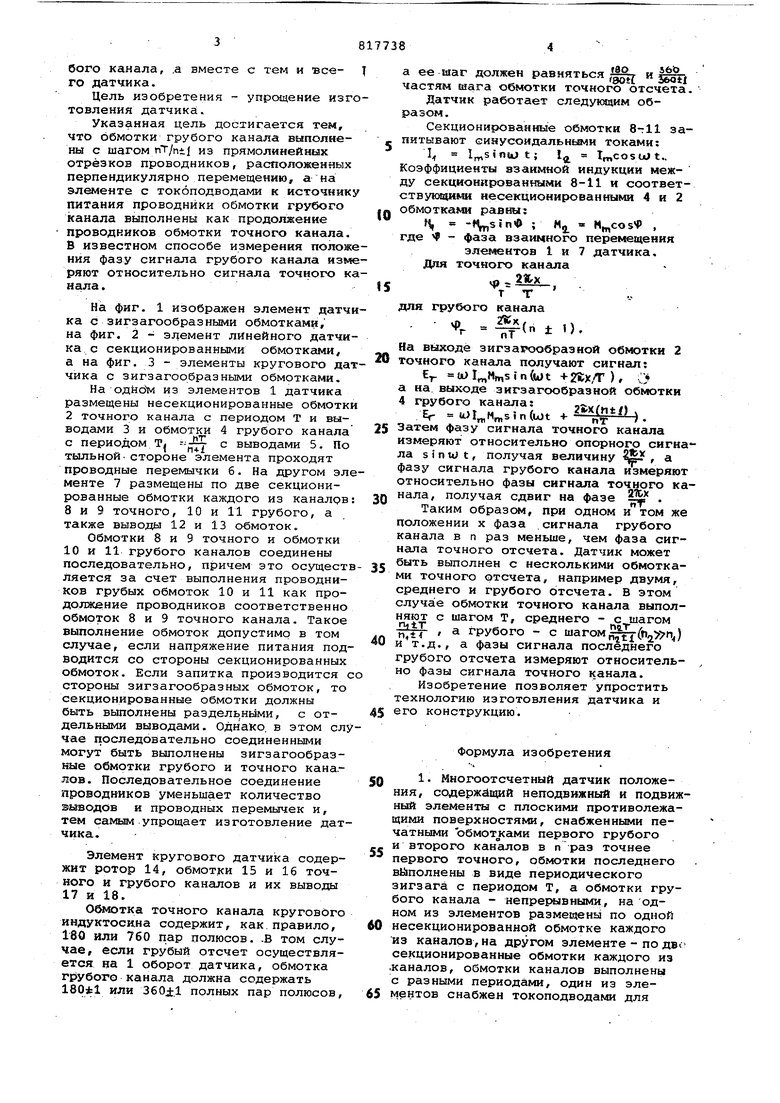
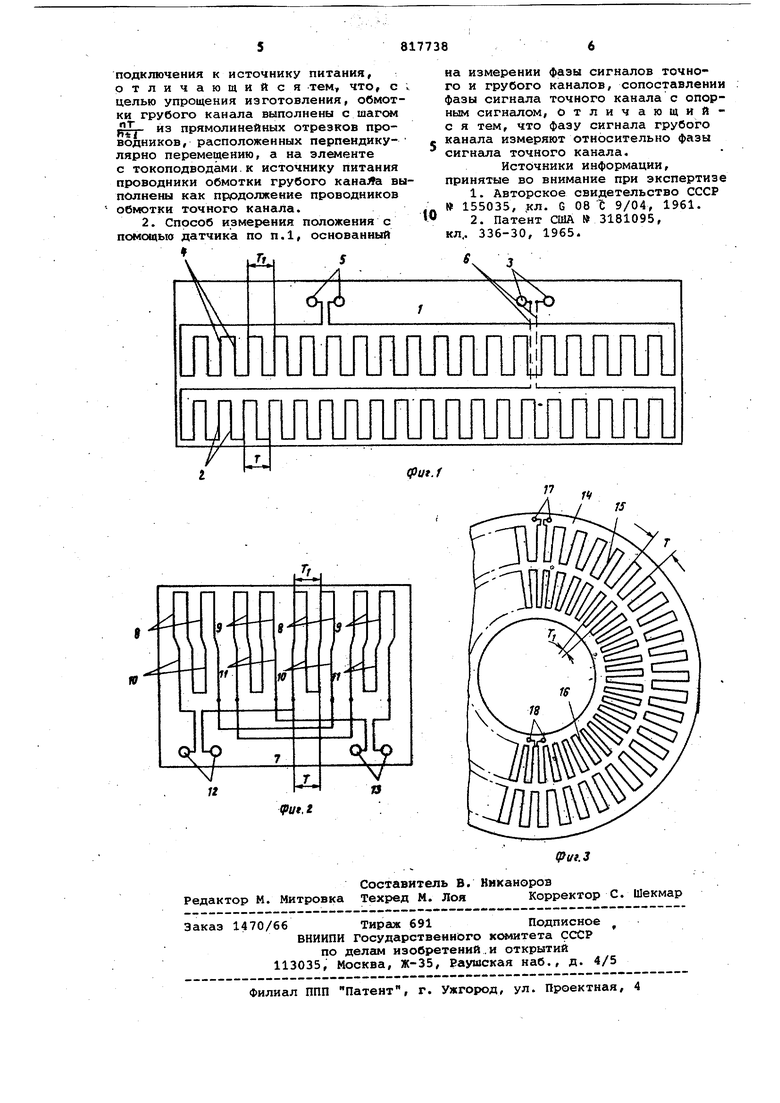
1 - . ..,.. Изобретение относится к приборостроению и может быть использовано в устройствах измерения перемешений подвижных узлов станков, измерительных машин и приборов В современном машиностроении и приборостроении для определения точного абсолютного взаимного положения перемещаемых узлов используются мног отсчетные датчики положения. Известен двухканальйый датчик перемещений в виде синусно-косйнусного поворотного трансформатора с ферритовым магнитопроводом и печатными обмотками Cl3 Недостатком данного датчика является сложность его изготовления. Наиболее близким к предлагаем 1у является многоотсчетный датчик положения, содержащий неподвижный и подвижный элементы с плоскими противолежащими поверхностями, снабженными печатными обмотками первого грубого и второго каналов в п раз точнее первого точного, обмотки последнего выполнены в виде периодического зигзага с периодом Т, а обмотки грубого канала - непрерывными, на одном из элементов размещены по одно несекционированной обмотке каждого из каналов, на другом элементе - по две секционированные обмотки казкдого из каналов, обмотки каналов выполнены с разными периодами, один из элементов снабжен то1соподводами для подключения к источнику питания. Способ измерения положения с помощью такого датчика основан на измерении фазы сигналов точного и грубого каналов и сопоставлении фазы сигнала точного канала с опорным сигналом. При этом сдвиг по фазе сигнала точного канала равен: где X - перемещение элементовТ - период обмоток точного канала. Для получения информации по грубому каналу фазу этЪго сигнала, которая в этом случае равна Ф ::211;х/пТ, сравнивают с тем же опорным сигналом. В результате .измерений получают, что при одном и том же перемещении х фаза сигнала грубого канала изменяется в п раз меньше фазы сигнала точного канала f2 . Недостаток известного датчика сложность изготовления обмоток грубого канала, .а вместе с тем и всего датчика. Цель изобретения - упрощение изг товления датчика. Указанная цель достигается тем, что обмотки грубого канала выполнены с шагом nT/nti из прямолинейных отрезков проводников, расположенных перпендикулярно перемещению, а на элементе с токоподводами к источник питания проводники обмотки грубого канала выполнены как продолжение проводников обмотки точного канала, В известном способе измерения полож ния фазу сигнала грубого канала изм ряют относительно сигнала точного к нала. На фиг. 1 изображен элемент датч ка с зигзагообразными обмотками, на фиг. 2 - элемент линейного датчи ка с секционированными обмотками, а на фиг. 3 - элементы кругового да чика с зигзагообразными обмотками. На ORtidM из элементов 1 датчика размещены несекционированные обмотк 2 точного канала с периодом Т и выводами 3 и обмотки 4 грубого канала с периодом Т (7 в лводами 5. По тыльной.стороне элемента проходят проводные перемычки б, На другом эл менте 7 размещены по две секционированные обмотки каждого из каналрв 8 и 9 точного, 10 и 11 грубого, а также выводы 12 и 13 обмоток. Обмотки 8 и 9 точного и обмотки 10 и 11 грубого каналов соединены последовательно, причем это осущест ляется за счет выполнения проводников грубых обмоток 10 и 11 как продолжение проводников соответственно обмоток 8 и 9 точного канала. Такое выполнение обмоток допустимо в том случае, если напряжение питания под водится со стороны секционированных обмоток. Если запитка производится стороны зигзагообразных обмоток, то секционированные обмотки должны быть выполнены раздель ньами, с отдельными выводами. Однако, в этом сл чае последовательно соединенными могут быть выполнены зигзагообразные обмотки грубого и точного кана.лов. Последовательное соединение проводников уменьшает количество выводов и проводных перемычек и, тем самым упрощает изготовление дат чика. Элемент кругового датчика содержит ротор 14, обмотки 15 и 16 точного и грубого каналов и их выводы 17 и 18. Обмотка точного канала кругового индуктоснна содержит, как правило, 180 или 760 пар полюсов. -В том случае, если грубый отсчет осуществляется на 1 оборот датчика, обмотка грубого канала должна содержать или 360il полных пар полюсов. а ее шаг должен равняться f и | частям шага обмотки точного отсчета. Датчик работает следующим образом. Секционированные обмотки 8-т11 запитывают синусоидальными токами: 1 l sinjut; 1 T cosult.. Коэффициенты взаимной индукции между секционированными 8-11 и соответствукяцими несекционированными 4 и 2 обмотками равны: ; М5 где - фаза взаимного перемещения злементов 1 и 7 датчика. Для точного канала т Т для грубого канала 0 2Кх, ТГГ ± На выходе зигзагообразной обмотки 2 точного канала получают сигнал: Е W ,s i п (w t + 2«;х,Т ), : а на выходе зигзагообразной обмотки 4 грубого канала: 5г«/и л ЕГ .п(ы -2±1т11Ц. Затем фазу сигнала точного канала измеряют относительно опорного сигнала Siпшt, получая величину , а фазу сигнала грубого канала измеряют относительно фазы сигнала точного канала, получая сдвиг на фазе . Таким образом, при одном же положении X фаза сигнала грубого канала в п раз меньше, чем фаза сигнала точного отсчета. Датчик может быть выполнен с несколькими обмотками точного отсчета, например двумя, среднего и грубого отсчета. В этом случае обмотки точного канала выполняют с шагом Т, среднего - с шагом -R а грубого - с шагом (b,nj и т.д., а фазы сигнала последнего грубого отсчета измеряют относительно фазы сигнала точного канала. Изобретение позволяет упростить технологию изготовления датчика и его конструкцию. Формула изобретения 1. Многоотсчетный датчик положения, содержащий неподвижный и подвижный элементы с плоскими противолежащими поверхностями, снабженными печатными обмот сами первого грубого и второго каналов в п раз точнее первого точного, обмотки последнего вЦ1полнены в виде периодического зигзага с периодом Т, а обмотки грубого канала - непрерывными, на одном из элементов размещены по одной несекционированной обмотке каждого из каналов, на другом элементе - по дв се ционированные обмотки каждого из .каналов, обмотки каналов выполнены с разными периодами, один из элементов снабжен токоподводами для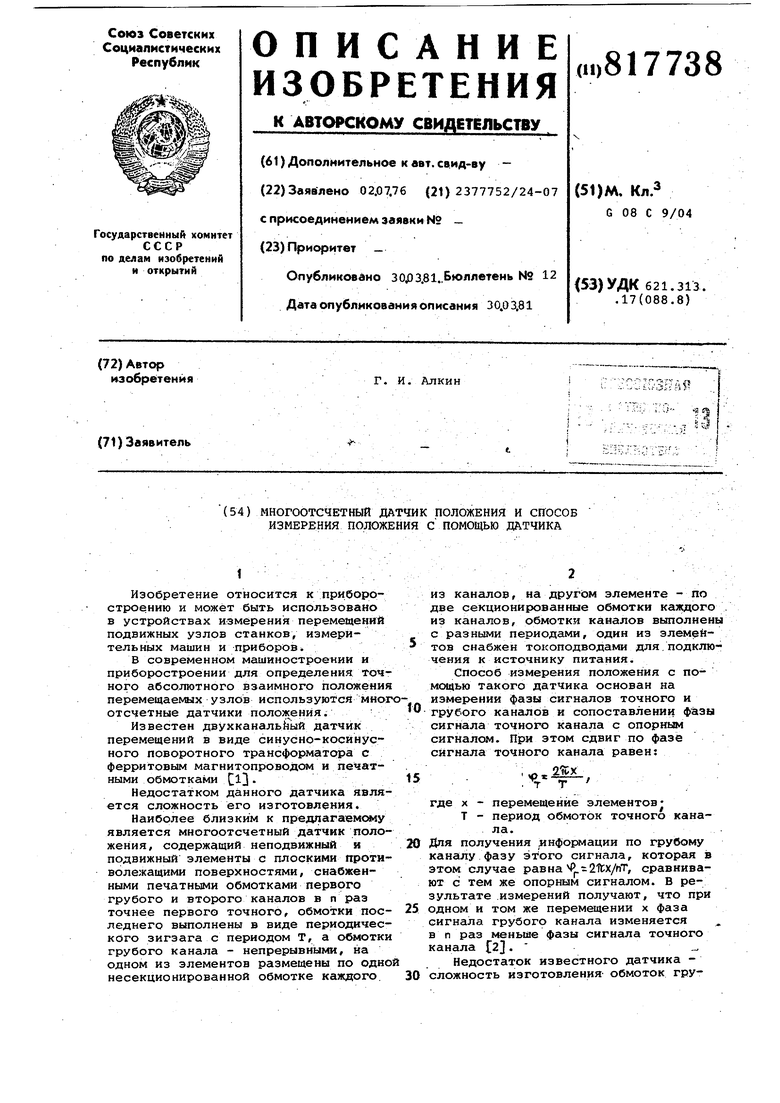
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения - многоотсчетныйиНдуКТОКОР | 1977 |
|
SU817892A1 |
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| Датчик перемещений | 1978 |
|
SU817893A1 |
| Датчик перемещения - "индуктокор | 1978 |
|
SU817894A1 |
| Индуктосин | 1983 |
|
SU1136266A1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| Датчик угловых перемещений | 1980 |
|
SU879287A1 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2570232C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2367902C1 |
| Многофазный индукционный датчик положения | 1974 |
|
SU551500A1 |
