(54) ПОДЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2268239C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| Устройство для вытяжения позвоночника | 2019 |
|
RU2712312C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Передвижной подъемник | 1982 |
|
SU1087459A1 |
| РАБОЧАЯ ПЛАТФОРМА НА ВИЛОЧНОМ ПОГРУЗЧИКЕ | 1991 |
|
RU2021972C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| Рабочая платформа на вилочном погрузчике | 1989 |
|
SU1615153A1 |
| ПОДЪЕМНИК | 1993 |
|
RU2081054C1 |
Изобретение относится к области грузск поаъемных устройств. Оно предназначено рля использования преимущественно на судах и в складских помещениях для вертикальной транспортировки грузов.
Известен подъемник, содержащий гидроцилиндр подъема, верхнюю и нижнюю платформы, связанные между собой шарнирно-рычажной системой типа нюрнбергских ножниц, верхние и нижние центральные шарниры которых смонтированы в вертикальных направляющих l.
Недостатком этого подъемника является большое тяговое усилие привода.
Цель изобретения - уменьшить тяговое усилие привода,
Это достигается тем, что гицроцилиндр подъема снабжен перемещающимися в направляющих каретками с верхним и нижним захватами, при этом нижний захват соцержит серьгу с пазом, в который входит ниц НИИ центральный щарнир.
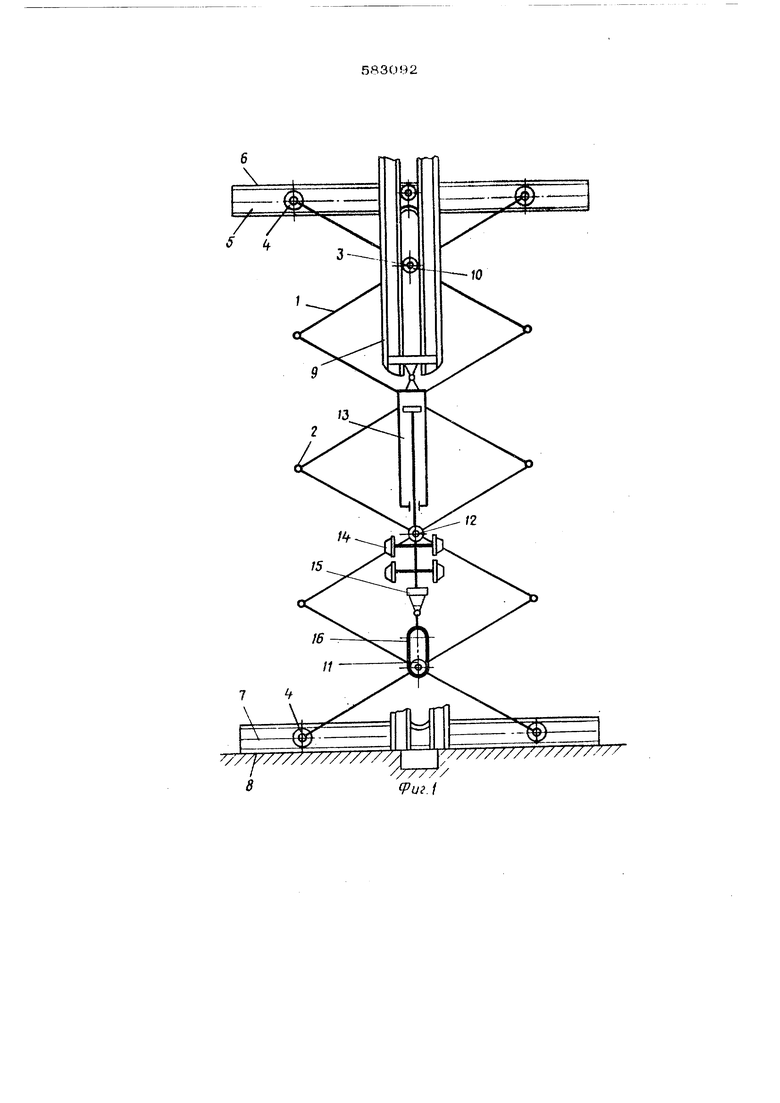
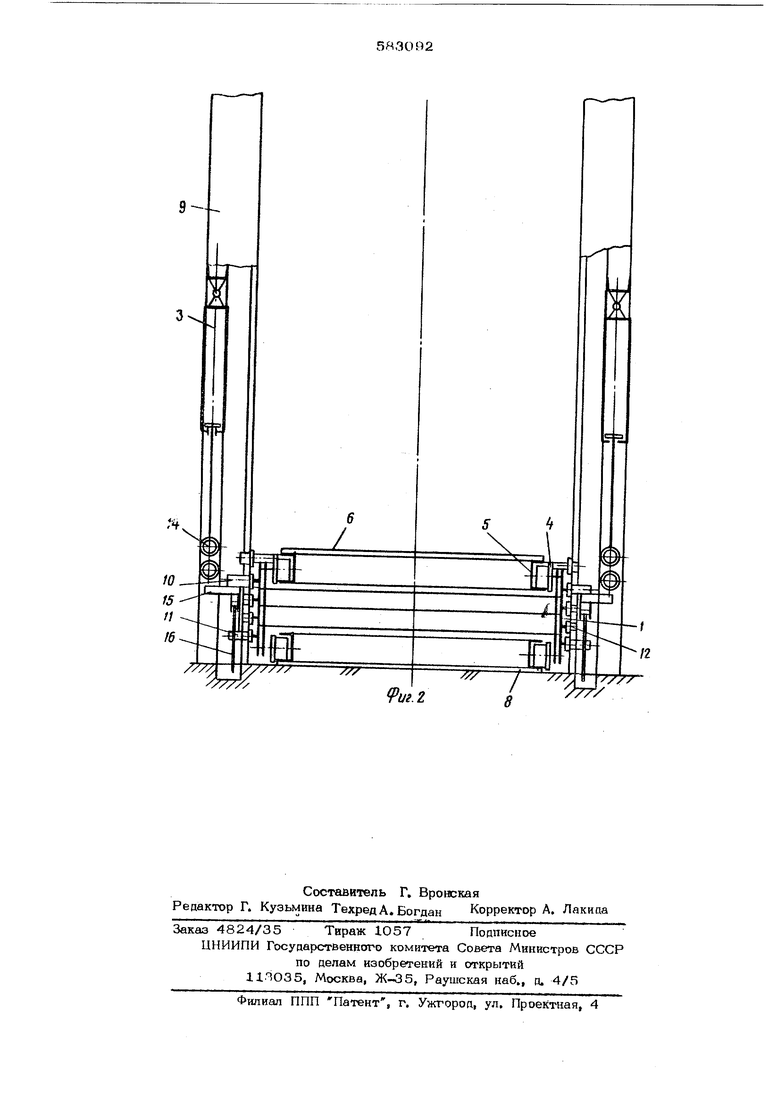
На фиг, 1 изображен описываемый подъемник гз поднятом положении, общий вид; на фигГ2 - то же, виц сбоку.
Рычажный механизм подъемника типа нюрнбергские ножницы состоит из рычагов 1, концы которых соединены концевыми осями 2, а середины - центральными осями 3. Верхние концы рычагов рычажной системы оснащены роликами 4, размещенными в направляющих 5 верхней платформы 6 подъемника. Нижние концы рычагов также оснащены роликами 4, размещенными в направляющих 7 нижней платформы 8. Концы осей рычажной системы имеют ролики, которые размещены в направляющих 9 подъемника.
При этом ролики 10 центральной верхней оси и ролики 11 центральной нижней оси имеют большую длину по сравнению с остальными роликами 12 осей.
Привод возвратно-поступательного перемещения выполнен из двух гидроцилиндров 13| шарнирно связанных с каретками 14, Последние размещаются в направляющих 9 подъемника. На каждой каретке 14 имеется два захвата: верхний 15 и нижний 16,
Конструктивно захват 16 выполнен в виде серьги, в которой имеется паз с размещепным в нем роликом 11 центральной нижней оси 3 рычажной системы.
Подъемник работает следующим образом.
Гиароцилшшры 13 включаются в работу на подъем платформы в и тянут каретки 14 вверх. Каретки, перемешаясь вверх по направляющим 9, захватами 15 упираются в рол1« 10 центральной верхней оси и поднимают его, тем самым поднимают платформу 6 подъемника. При этом ролнк 11 централыюй нижней оси 3 свободно перемещае ся в пазу захвата 16 до тех пор, пока не упрется в нижнюю кромку паза.
Кратность хопа рычажной системы составляет Всего два, т.е. усилия, возникаюшие в этот период подъема в рычажной системе И- необходимое тяговое усилие гидро цилиндров сравнительно невелики.
При дальнейшем подъеме каретки 14 захват 16 поднимает ролик 11 нижней центральной оси. Скорость перемещения верхнего ролика 10 центральной верхней оси выше скорости перемещения каретки 14, поэтому он перестает контактировать с захватом 15.
Усилия, воз :икаюшие при этом в рычажной системе, небольшие, поскольку отно- шение горизонтальной диагонали ромба, образованного парами рычагов 1, к вертикаль ной значительно меньше, чем при сложной рычажной системе.
РОЛИКИ центральных осей и верхней плат формы во время подъема перемещаются в направляющих 9 подъемника и совместно с
рычажной системой обеспечивают устойчивость верхней плат1}10рмы во всех плоскостях.
Работа подъемника при опускании происходит в обратном порядке.
Такая конструкция подъемника позволяет уменьшить вес его и тяговое усилие привода, а кроме того, она более проста, надежна и удобна в эксплуатации на судах, поскольку обеспечивает надежную работу в условиях качки.
Формула изобретения
Подъемник, содержащий гифоцилиндр подъема, верхнюю и нижнюю платформы, связанные между собой шарнирно-рычажной системой типа нюрнбергских ножниц, верхние и нижние центральные шарниры которых смонтированы в вертикальных направляющих, отличающийся тем, что, с целью уменьшения тягового усилия привода, гидроцилиндр подъема снабжен перемещающимися в направляющих каретками с верхним и нижним захватами, при этом нижний захват содержит серьгу с пазом, взаимодействующим с нижним центральным шарниром.
Источники информации, принятые во внимание при экспертизе:
Vu.i
/77X
9ш.г
