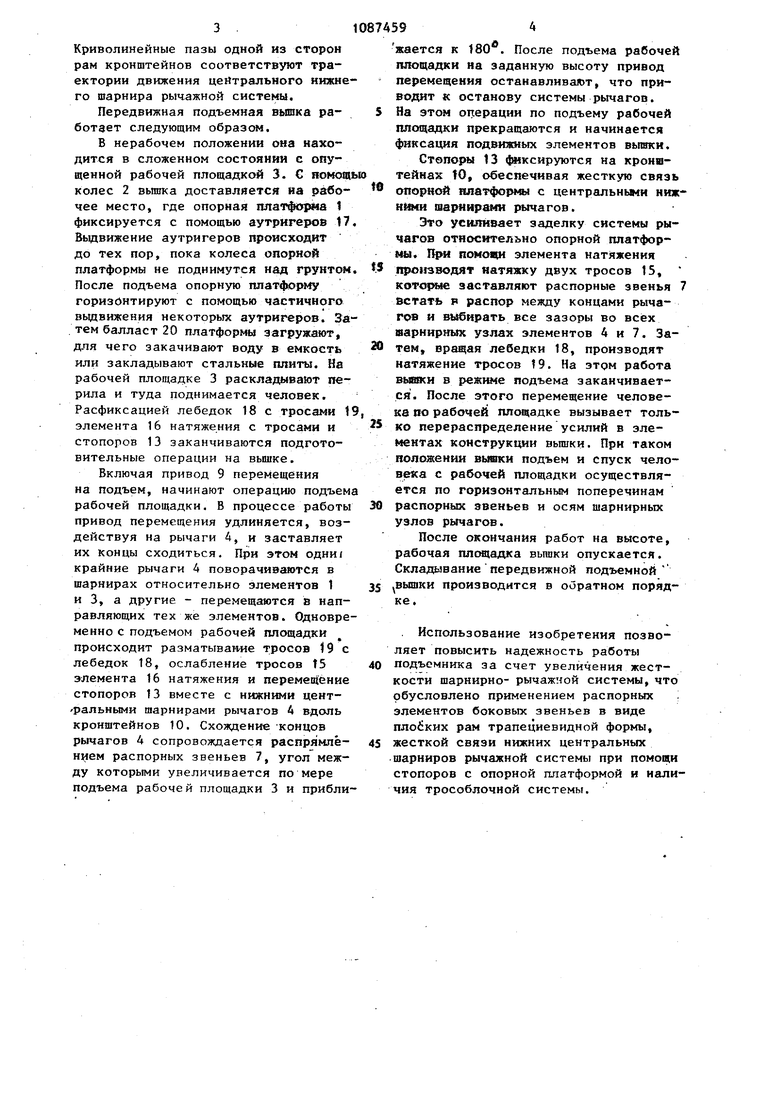
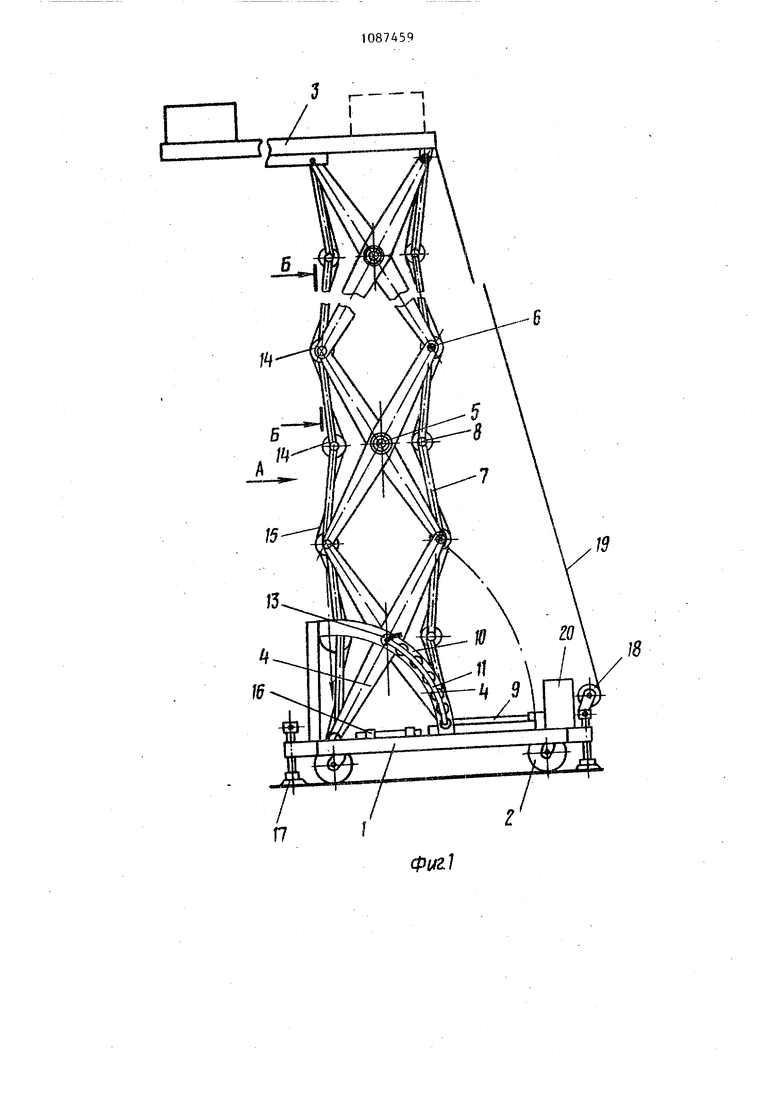
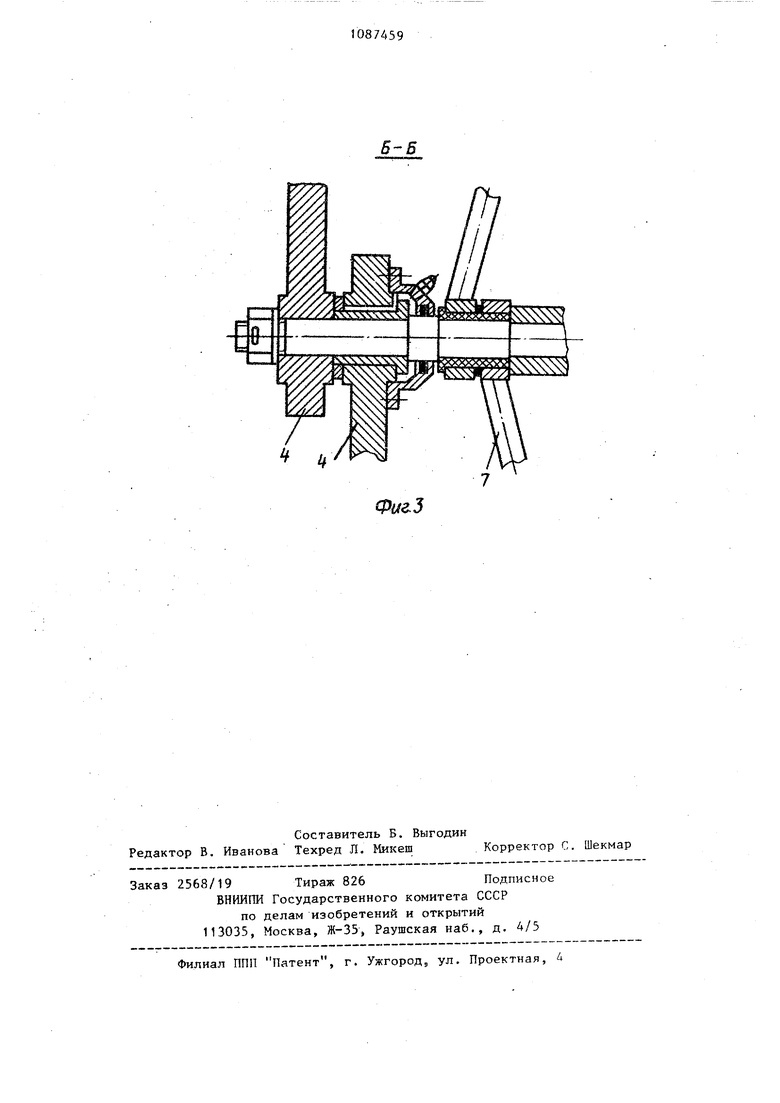
Изобретение относится к лодъемно {тракспортному машиностроению, а име но к конструкции передвижных подъем ников с шарнирно-рычажным механизмо подъема. Известен передвижной подъемник, содержащий опорную платформу с ходо вой частью и рабочую площадку, соединенные между собой шарнирно-рычажным механизмом типа нюрнбергски ножниц, крайние шарниры рычагов которого связаны звеньями, шарнирносочлененными между собой и образующими две боковые складные лестницы, привод перемещения рычагов шарнирно рычажного механизма lj . Однако шарнрфно-рычажная система известного подъемника имеет невысокую жесткость, что приводит к продольному и поперечному ггеремещениям рабочей площадки с увеличением высоты ее подъема. Это обусловлено перемещением рыч гов в пределах конструктивных зазоров в шарнирных узлах, нежесткой формой четырехзвенников, отсутствием стопоров для фиксации рычагов относительно опорной платформы. Цель изобретения - повышение надежности работы подъемника путем увеличения жесткости его шарнирнорычажной системы. ; Цель достигается тем, что передвижной подъемник, содержащий опорную платформу с ходовой частью и ра бочую площадку, соединенные между собой шарнирно-рычажным механизмом типа нюрнбергских ножниц, крайние шарниры рь чагов которого связаны звеньями5 шарнирно-сочлевенными Между собой и образующими две боковые складные лестницы, привод перемещения рычагов шарнирно-рычажного механизма, снабжен двумя параллельными плоскости шарнирно-рычажного механизма кронштейнами, жестко соединенными с опорной платформой и выполненными в виде треугольных рам, одна из сторон которых имеет криволинейный паз, причем в этих пазах размещены концы оси центральн го нижнего шарнира указанного механизма, снабженные стопорами для фик сации рычагов, шарнирно-сочлененные звенья лестниц выполнены в виде жестких рам трапецеидальной формы, шарнирно-связанных межл.у собой мень шими основаниями, причем подъемник 592 снабжен трособлочнсй системой, блоки которой установлены на осях шарниров рычагов и на осях шарниров, соединяющих основания указанных жестких рам, при этом тросы запасованы через блоки и закреплены верхними концами на рабочей площадке, а нижние их концы соединены с натяжным устройством, установленным на опорной платформе. На фиг. 1 показан передвижной подъ емник, общий вид; a.i фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Передвижной подъемник содержит опорную платформу 1 с ходовой частью, имеющей колеса 2 рояльного типа и рабочую площадку 3, соединенные между собой шарнирно-рьгчажным механизмом типа нюрнбергских ножниц, рычаги 4 которого соединены шарнирами 5, а крайние шарниры 6 рычагов связаны звеньями 7, сочлененными между собой шарнирами 8 и образующими две боковые складные лестницы. Подъемник снабжен приводом перемещения рычагов 9, а также двумя параллельными плоскости шарнирно-рычажного механизма кронштейнами 10, жестко соединенными с опорной патформой 1 и выполненными в виде треугольных рам, одна из сторон которых имеет криволинейный паз 11, причем в этих пазах размещены концы оси 12 центрального нижнего шарнира указанного механизма. Конць указанной оси снабжены стопорами 13 для фиксации рычагов, шарнирно-сочлененные звенья лестниц выполнены в виде жестких рам трапецеидальной формы, шарнирно-связанных между собой меньшими основаниями. Подъемник снабжен трособлочной системой, блоки 14 которой установлены на осях 6 крайних шарниров рычагов и на осях 8 шарниров, соединяющих основания указанных жестких рам, при этом тросы 15 запасованы через блоки и закреплены верхними концами на рабочей площадке, а нижними соединены с натяжным устройством 16, которое установлено на опорной платформе и может быть выполнено в виде одного с правой и левой резьбами и гайками на концах связанными с тросами 15. Подъемник снабжен также аутригерами 17, лебедки 18 с тросами 19. балластом 20, Стопо эы 13 могут быть выполнены в виде винтомых чажимов. Криволинейные пазы одной из сторон рам кронштейнов соответствуют траектории движения центрального нижнего шарнира рычажной системы. Передвижная подъемная вьшка работает следующим образом. В нерабочем положении она находится в сложенном состоянии с опущенной рабочей площадкой 3. С помощ колес 2 вьшгка доставляется на рзбочее место, где опорная платфорнма 1 фиксируется с помощью аутригеров 17 Вьщвижение аутригеров происходит до тех пор, пока колеса опорной платформы не поднимутся над грунтом После подъема опорную платформу горизонтируют с помощью частичного выдвижения некоторых аутригеров. За тем балласт 20 платформы загружают, для чего закачивают воду в емкость или закладывают стальные плиты. На рабочей площадке 3 раскладывают перила и туда поднимается человек. Расфиксацией лебедок 18 с тросами элемента 16 натяжения с тросами и стопоров 13 заканчиваются подготовительные операции на вьпике. Включая привод 9 перемещения на подъем, начинают операцию подъем рабочей площадки. В процессе работы привод перемещения удлиняется, воздействуя на рычаги 4, и заставляет их концы сходиться. При этом ОДНИ крайние рычаги 4 поворачиваются в шарнирах относительно элементов 1 и 3, а другие - перемещаются в направляющих тех же элементов. Одновре менно с подъемом рабочей площадки происходит разматыван-ие тросов 19 с лебедок 18, ослабление тросов 15 элемента 16 натяжения и перемещение стопоров 13 вместе с нижними центральными шарнирами рычагов 4 вдоль кронштейнов 10. Схояодение концов рычагов 4 сопровождается распрямлёнием распорных звеньев 7, угол между которыми увеличивается по мере подъема рабоче и площадки 3 и прибли жается к 180 . После подъема рабочей площадки на заданную высоту привод перемещения останавливают, что приводит к останову системы рычагов. На этом операции по подъему рабочей площадки прекращаются и начинается фиксация подвштых элементов вьпяки. Стопоры 13 фиксируются на кронштейнах 0, обеспечивая жесткую связь опорной нлатфорга) с центральными нижними шарнирами рычагов. Это усиливает заделку системы рычагов относительно опорной платформы. Щн помсци элемента натяжения производят «атяжку двух тросов 15, кото|Ийе заставляют распорные звенья 7 Встать Р распор между концами рычагов и выбирать все зазоры во всех шарнирных узлах элементов 4 и 7. Затем, вращая лебедки 18, производят натяжение тросов 19. На этдм работа выгаси в режиме подъема заканчивается. После этого перемещение человека во рабочей площадке вызывает только перераспределение усилий в элементах конструкции вышки. При таком положении вышки подъем и спуск человека с рабочей площадки осуществляется по горизонтальным поперечинам распорных звеньев и осям шарнирных узлов рычагов. После окончания работ на высоте, рабочая площадка вышки опускается. Складывание передвижной подъемной выщки производится в обратном порядке. Использование изобретения позволяет повысить надежность работы подъемника за счет увеличения жесткости шарнирно- рычажной системы, что обусловлено применением распорных . элементов боковых звеньев в виде плобких рам трапециевидной формы, жесткой связи нижних центральных шарниров рычажной системы при помощи стопоров с опорной платформой и наличия трособлочной системы.
6
Ф4/г7
Фаг.Е
ФкгЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| ПОДЪЕМНИК | 1993 |
|
RU2061648C1 |
| Подъемник | 1978 |
|
SU695960A1 |
| Подъемник | 1988 |
|
SU1519998A1 |
| ПОДЪЕМНИК | 1939 |
|
SU60279A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Подъемная платформа | 1990 |
|
SU1730023A1 |
| Подъемник | 1978 |
|
SU931699A1 |
ПЕРЕДВИЖНОЙ ПОДЪЕМНИК, содержащий опорную платформу с ходевой частью и рабочую площадку, соединенные между собой шарнирно-рычажным механизмом типа нюрнбергских ножниц, крайние шарниры рычагов которого связаны звеньями, шарнирно-сочлененными между собой и образующими две боковые складные лестницы, привод перемещения рычагов шарнирнорычажного механизма, отличающий с я тем, что, с целью повышения его надежности в работе путем увеличения жесткости шарнирно-рычажной системы, он снабжен двумя параллельными плоскости шарнирно-рычажного механизма кронштейнами, жестко соединенными с опорной платформой и выполненными в виде треугольных рам, одна из сторон которых имеет криволинейный паз, причем в этих пазах размещены концы оси центрального нижнего шарнира указанного механизма, снабженные стопорами для фиксации рычагов, шарнирно-сочлененные звенья лестниц выполнены в виде жестких рам трапецеидальной формы, шарнирно связанных между собой меньшими основаниями, причем подъемник снабжен трособлочной сисkn темой, блоки которой установлены на осях крайних шарниров рычагов и на осях шарниров, соединяющих основания указанных жестких рам, при зтом тросы запасованы через блоки и закреплены верхними концами на рабочей площадке, а нижние концы их соединены с натяжным устройством, установленным на опорной платформе. 00 4:аь СП QO
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Передвижной подъемник | 1927 |
|
SU10912A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
