Изобретение относится к транспорт- но-складскому оборудованию.
Цель изобретения - повышение точности позиционирования грузовой платформы.
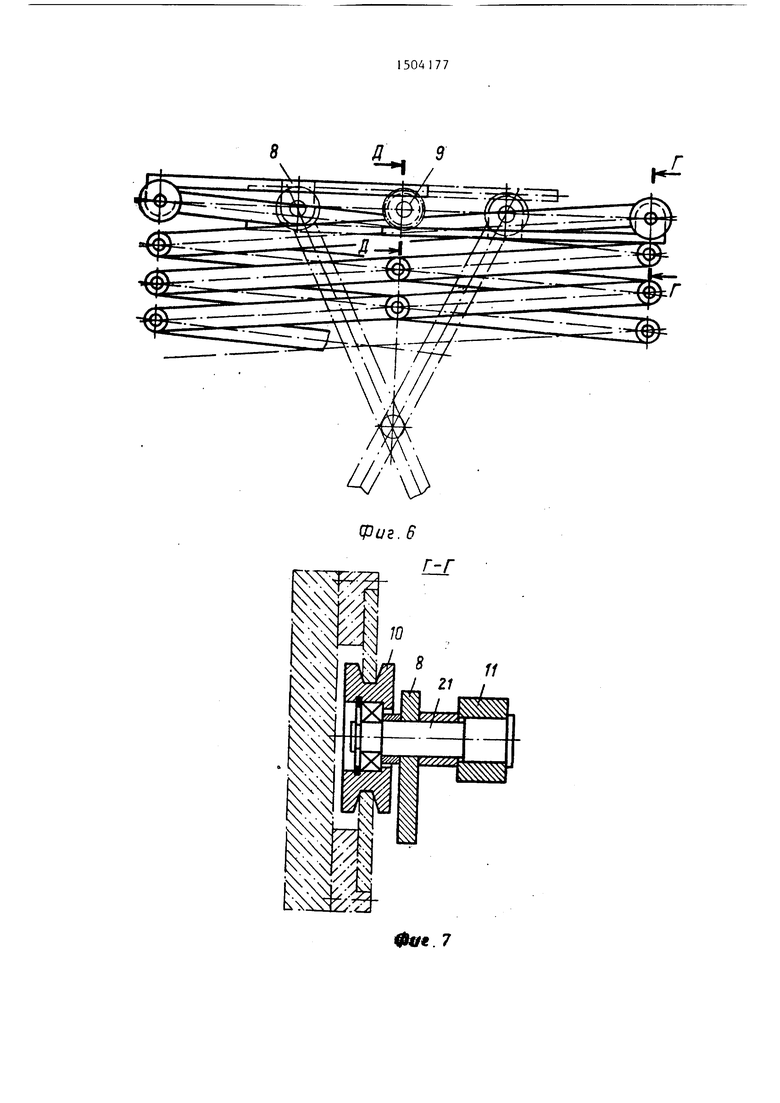
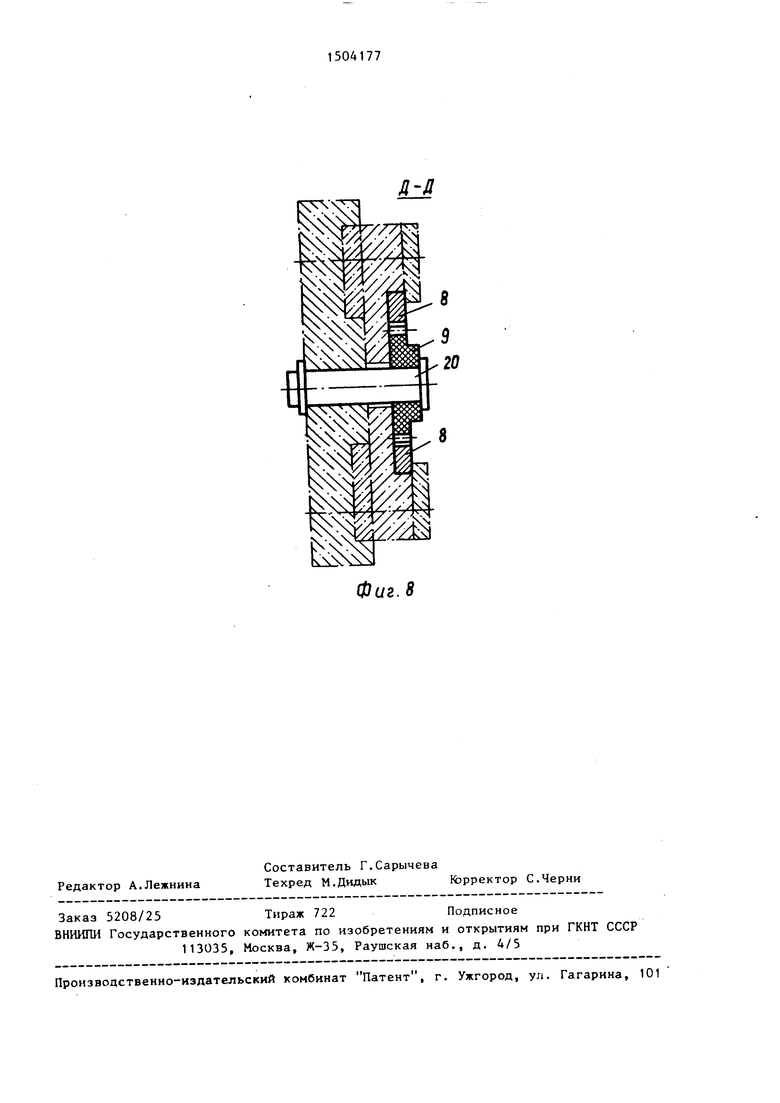
На фиг. 1 изображен кран-штабелер, вид сбоку; на фиг. 2 - то же, вид с торца; на фиг. 5 - сечение А-А на фиг. 1 (шарнирно-рычажный механизм раскрыт); на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - сечение В-В на фиг. 3; на фиг. 6 - рычажный механизм с синхронизаторами, общий вид; на фиг. 7 - сечение Г-Г на фиг. 6; на фиг. 8 - сечение Д-Д на фиг. 6.
Кран-штабелер монорельсовый содержит тягач 1 и холостую каретку 2
на которых смонтирована неподвижная платформа 3. На платформе 3 размещен механизм подъема груза, содержащий привод 4, вал 5, приводные звездочки 6, навправляющие линейки 7 и синхронизаторы в виде зубчатых реек 8 и шестерен 9. На направляющих линейках с помощью роликоп 10 подвешены две параллельно расположенные рычажные системы 11 механизма нюрнбергские ножницы, на нижних концах рычагов которых с помощью роликов 10 и направляющих линеек 7 подвешена подвижная платформа 12. На последней размещены телескопический захват 13 с индивидуальным приводом 14, вал- шестерня 15 и кронштейны 16, к котоСП
о
4iib
vj -si
3150
рым прикреплен тяговьй орган (например, цепь) 17. Соединение .тягового органа 17 сподвижкой платформой 12 выполнено со смещением от оси центральных шарниров каждой шарнирно- рычажной системы 11. На захвате 13 закреплены схваты 18. Платформа фиксируется в верхнем положении защелками 19. В связи с этим на платформу 12 постоянно воздействует усилие, стремящееся сместить ее к оси симметрии системы 1 1 . При эл-ом усилие воздействует и на саму систему 11, выбирая зазоры и люфты в ее шарнирных соединениях.
Шестерни 9 свободно поворачиваются на осях 20, которые неподвижно закреплены на платформах. Рейки 8 попарно находятся в зацеплении с шестернями 9, располагаются в пазах платформ и снабжены осями 21, с помощью которых соединяются с рычагами шарнирно- рьтажной системы 11.
Кран-штабелер работает следующим образом.
В режиме Захват кран-штабелер перемещается к месту расположения груза, ниже уровня упоров тары с грузом опускается платформа 12 с телескопическим захватом 13, который вьщвигается, и груз с боков захватывается подпружиненными схватами 18, затем платформа 12 вместе с грузом приподнимается и захват 13 вместе с грузом втягивается на платформу и устанавливается в исходном положении
В режиме Подъем платформа 12 с помощью тягового органа 17 перемещается вверх li фиксируется в крайнем верхнем положении с помощью защелок 19. В процессе подъема платформы концы рычагов систем 11 с помощью реек 8 и шестерен 9 на роликах 10 по направляющим линейкам синхронно и плавно расходятся в стороны.
Далее врежиме Транспортирование кран-штабелер перемещает груз по
0
5
0
5
0
5
0
5
заданному адресу. Разгрузка груза на рабочем месте (или на складе) производится в обратной последовательности.
В устройстве имеется возможность регулирования расстояния между схва- fraMH 18, что позволяет захватывать грузы различных габаритов. Формула изобретения
1.Кран-штабелер, содержащий размещенную на горизонтальных направляющих каретку, грузовую платформу с захватом для груза и механизм вертикального перемещения грузовой плат- формьг, включающий гибкий тяговый орган, соединенный с последней и барабаном приводной лебедки, смонтированной на каретке, и по крайней мере одну связанную с рамой зтой каретки
и грузовой платформой систему шарнир- но связанных рычагов типа нюрнбергские ножницы, имеющую ролики на свободных концах крайних рычагов со стороны рамы каретки и грузовой платформы, размещенные в горизонтальных направляющих последних, отличающийся тем, что, с целью повышения точности позиционирования грузовой платформы, к осям роликов кон- сольно прикреплены зубчатые рейки, обращенные в зоне рамы каретки и в зоне грузовой платформы навстречу одна другой, а на раме каретки и грузовой платформе свободно закреплены по одной входящей в зацепление с зубчатыми рейками шестерни, оси которых размещены горизонтально в вертикальной плоскости, проходящей через оси центральных шарниров.
2.Кран-штабелер по п. 1, отличающийся тем, что барабан приводной лебедки смонтирован на раме каретки с образованием смещения гибкого органа относительно вертикальной плоскости, проходящей через оси центральных шарниров сис- т емы.
/j 7j //j // /////////////////// ////////////////У///
f
f
/5 J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки и разгрузки стеллажей | 1981 |
|
SU977335A1 |
| Кран-штабелер | 1985 |
|
SU1341119A1 |
| РАБОЧАЯ ПЛАТФОРМА НА ВИЛОЧНОМ ПОГРУЗЧИКЕ | 1991 |
|
RU2021972C1 |
| Подъемник | 1976 |
|
SU583092A1 |
| ГРУЗОВАЯ ПЛАТФОРМА КРАНА-ШТАБЕЛЕРА | 1972 |
|
SU332025A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| КРАН-ШТАБЕЛЕР | 1965 |
|
SU214390A1 |
| Грузоподъемник крана-штабелера | 1977 |
|
SU678005A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Стеллажный кран-штабелер | 1986 |
|
SU1402521A1 |


Изобретение относится к транспортно-складскому оборудованию. Цель изобретения - повышение точности позиционирования грузовой платформы. Кран-штабелер содержит тягач, холостую каретку, механизм подъема груза в виде подвижной 12 и неподвижной 3 платформ, связанных гибким тяговым органом 17 и шарнирно-рычажным механизмом "нюрнбергские ножницы". На подвижной платформе установлен телескопический захват с возможностью его выдвижения между плоскостями перемещения рычагов шарнирно-рычажного механизма. Перемещение концов рычагов осуществляется на роликах 10 по направляющим линейкам 7 с помощью реечных синхронизаторов, а гибкий тяговый орган 17 расположен со смещением от оси симметрии рычажных систем. 7 ил.
Фаг. 2
фиеЗ
Б-Б
1В
«гЛ
фиг. 5
иг.6
Г-Г
11
Hire 7
Фиг. 8
| Грузоподъемное устройство | 1983 |
|
SU1162737A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для загрузки и разгрузки стеллажей | 1981 |
|
SU977335A1 |
| Устройство для загрузки и разгрузки стеллажейСКлАдА | 1979 |
|
SU839883A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
