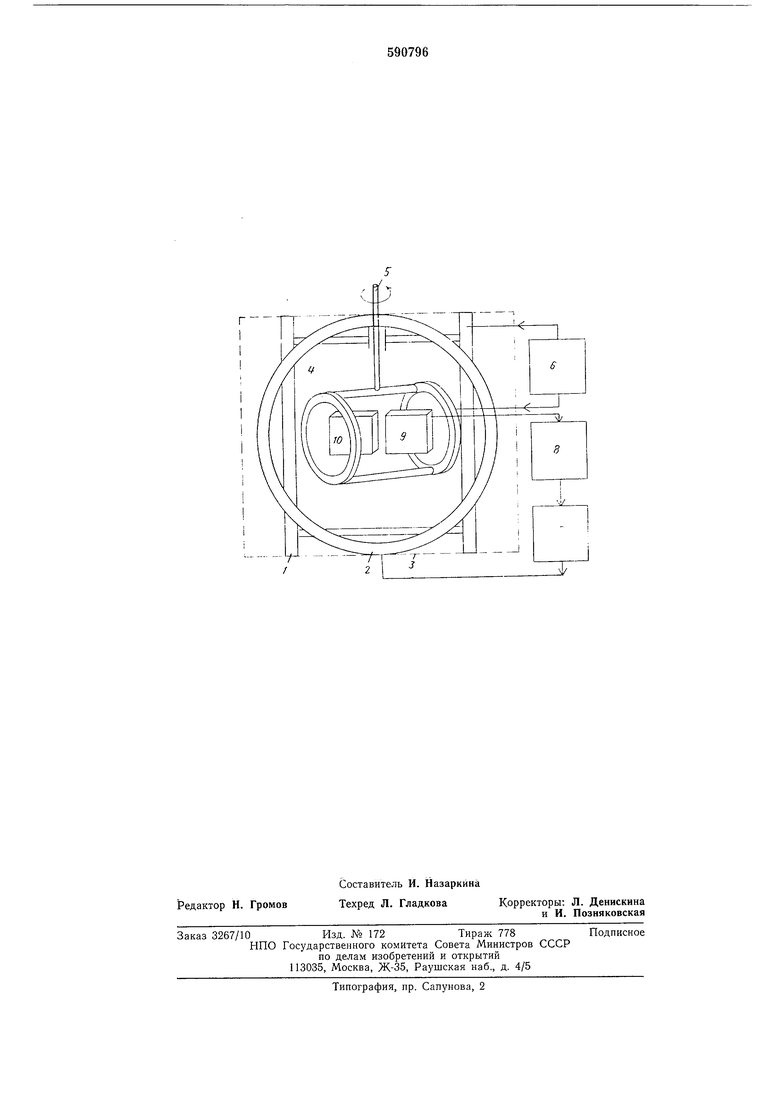
феррозонда, магнитная ось которого расположена параллельно оси магнитной системы 2. В зоне магнитных систем неподвижно укреплен кваптовый самогенерирующий датчик 10, выход которого является выходом частотного преобразователя.
Устройство работает следующим образом.
Магнитные системы 1, 2 и 4 создают в пространстве, ограниченном корпусом 3, магнитное поле, результирующая напрял ;енность Я которого является геометрической суммой век-
торов напряженности Яь HZ и Н магнитных полей соответственно систем 1, 2 и 4 и зависит от угла поворота входного вала 5, связанного
с подвижной магнитной системой 4. Вектор -
Н можно рассматривать как геометрическую
сумму двух составляющих, одна из которых
Нц коллинеарна, а вторая H - ортогональна
- вектору 1 и, следовательно, коллииеарна век-
тору Я2.
Магнитная система 2 совместно с интегратором 7, усилителем-формирователем 8 и нуль-индикатором 9 напряженности магнитного поля служит для компенсации компонен-
ты С этой целью магнитная ось нульиндикатора 9 ориентирована параллельно оси магнитной системы 2, и следовательно, коллинеарна вектору Н. При этих условиях входной сигнал нуль-индикатора 9 пропорционален составляющей напряженности результирующего магнитного поля, параллельной оси магнитной системы 2.
В качестве нуль-индикатора 9 быть использован феррозонд или другой датчик индукционного типа. Усилитель-формирователь 8 усиливает и преобразует выходной сигнал нуль-индикатора 9 в постоянный ток. Интегратор 7 используется для устранения статической ощибки системы компенсации.
Вследствие компенсации составляющей Н,
т. е. при Нч -Н вектор результирующей
напряженности магнитного поля в зоне расположения датчика 10 равен сумме двух колли- -
неарных векторов Я и Н. Поэтому вектор
-у
Я независимо от угла поворота входного вала 5 направлен параллельно оси магнитной системы 1, а его величина, фиксируемая квантовым датчиком 10, является функцией угла между осями подвижной и неподвижной магнитных систем 4 и 2.
Формула изобретения
Преобразователь угловых перемещений, содержащий квантовый датчик, магнитные системы, первая из которых жестко соединена с корпусом, а вторая - с входным валом, и источник опорного напряжения, подключенный к магнитным системам, отличающийся тем, что, с целью повыщения надежности и расщирения диапазона преобразования, в преобразователь введены усилитель-формирователь, интегратор, компенсационная магнитная система, которая установлена ортогонально первой магнитной системе, и нуль-индикатор напряженности магнитного поля, магнитная ось которого ориентирована параллельно оси компенсационной магнитной системы, причем выход нуль-индикатора напряясенности магнитного поля через последовательно соединенные
усилитель-формирователь и интегратор подключен к входу компенсационной магнитной системы.
Источники информации, принятые во внимание при экспертизе
1. Кудрявцев В. Б. и др. Прецезионные частотные преобразователи автоматизированных систем контроля и управления. 1974, с. 76-79. 2. Авторское свидетельство СССР № 223623, кл. G 08С 9/00, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитометр с устройством компенсации магнитных помех от носителя | 1977 |
|
SU693319A1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО МАГНИТОМЕТРИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ МЕТАЛЛА ТРУБОПРОВОДА | 2006 |
|
RU2306554C1 |
| Устройство для измерения угловых перемещений | 1980 |
|
SU920364A1 |
| Комплексный магнитометр-инклинометр для исследований скважин различного назначения | 2024 |
|
RU2831753C1 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |
| Компонентный дифференциальный магнитометр | 1978 |
|
SU739454A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2236029C1 |