(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕИЕМЕШЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Квантовый преобразователь тока в частоту с автоматическим выбором поддиапазона | 1975 |
|
SU554615A1 |
| Устройство для измерения угловых перемещений | 1976 |
|
SU600386A1 |
| Устройство для измерения магнитной индукции | 1980 |
|
SU892371A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для измерения угловых перемещений вала | 1977 |
|
SU702237A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Устройство для каротажа скважин | 1979 |
|
SU851309A1 |
| ТРЕХКОМПОНЕНТНЫЙ ОПТИЧЕСКИЙ КВАНТОВЫЙ МАГНИТОМЕТР НА АЗОТНО-ВАКАНСИОННЫХ ЦЕНТРАХ ОКРАСКИ В КРИСТАЛЛЕ АЛМАЗА | 2024 |
|
RU2835005C1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
I
Изобретение относится к системам автоматического. контроля и измерения перемещений, а именно к устройствам для измерения угловых перемещений.
Известен преобразователь угловых перемещенш, содержащий частотный квантовый датчик индукции магнитного поля, размещенный внутри двух магнитных систем. Одна из них подвижная - жестко соединенная с входным валом, а вторая, неподвижная, - с корпусом, являющимся одновременно магнитным экраном. При любом положении входного вала направление суммарного вектора магнитной индукции остается неизменным. Это достигается путем компенсации одной из составляющих вектора магнитного поля, создаваемого подвиж1той мапштной системой. Компенсация в данном устройстве осуц1ествляется при помощи следящей системы, состоящей из однокомпонентного нуль-индикатора магнитной ин-дукции, расположенного внутри магаитных систем, ось чувствительности которого коллинеарна с .осью одной из неподвижных магнитных систем, подключенной через индикатор и силитель-формирователь к выходу нуль-индака Topaf/j.
Недостатком этого устройства является дополнительная погрешность измерения углов, во:шикающая за счет использования нуль-индикатора, не совмещешю1Ч) с центром квантового датчика и создающего магнитные 1юмехи.
Наиболее близким по техническому решению к предлагаемому устройству является устройство для измерения перемещеинй, содержащее
10 входной вал, корпус, магнитную систему, состоящую из иеподвижной чаете, жестко соеди-. ненной с валом, частотный преобразователь ни-, дукции магнитного поля, редуктор, входной вал которого жестко соединен с входным ваtsлом, корпус жестга соединен с неподвижной частью магнитной системы, выходной вал - с частотным преобразователем, а частотный преобразователь выполнен в виде квантового самогенерирующето датчика 2.
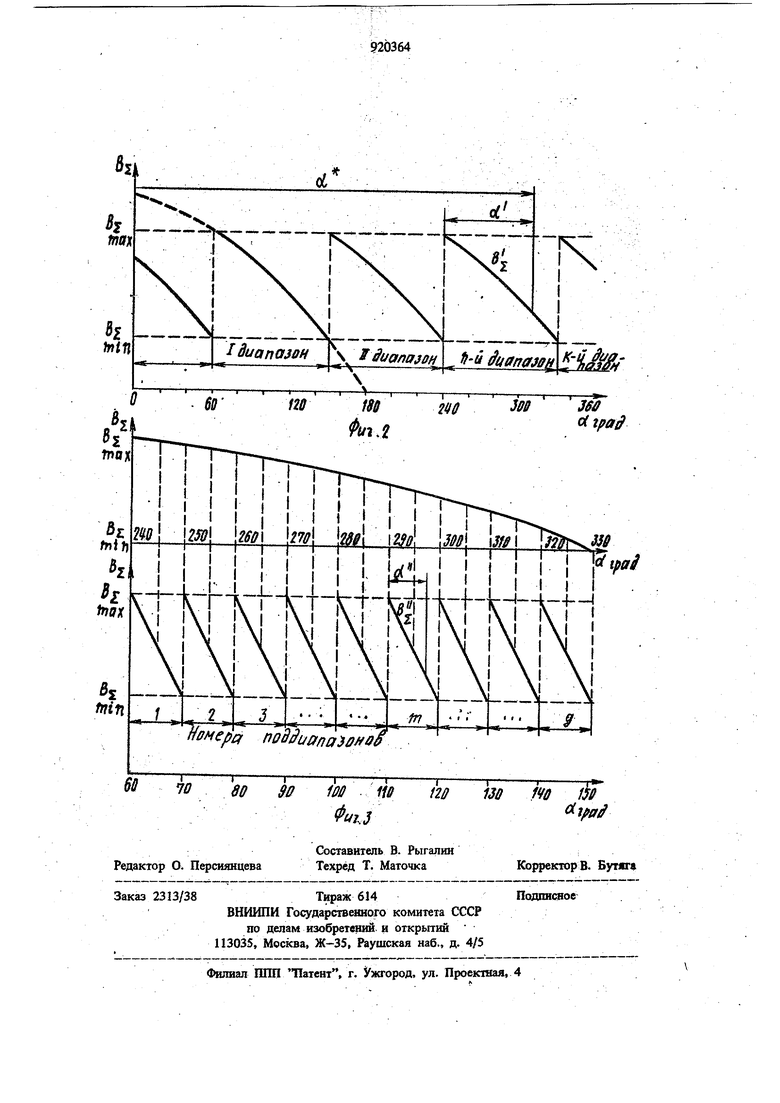
Я)
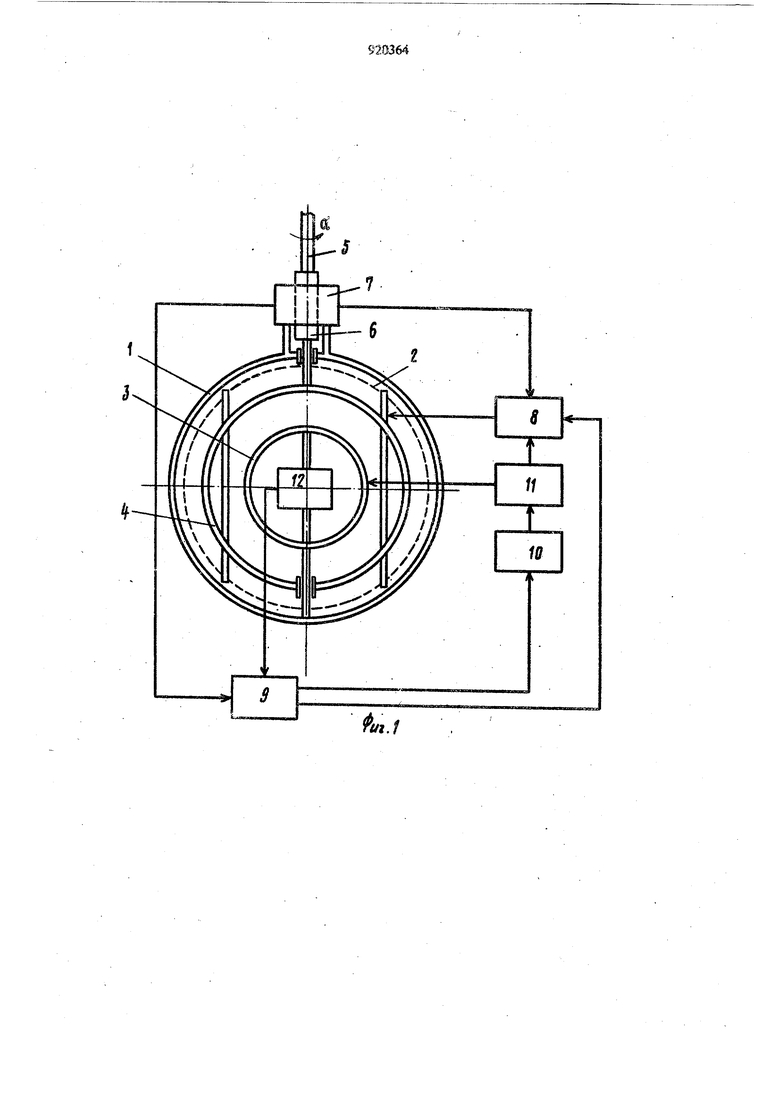
Недостатками зтого устройства являются ограниченный диапазон измерения углов, обусловленный рабочим диапазоном квантового датчика, значительные погрешности из-за взаимодействия вращающегося вектора мапоггаой .ивдукцин с ферромагнитным экраном, обусловленные нелинейностью намагничивания магнитного экрана; значительные погрешности определения угла разворота подвижной магнитной системы, обусловленные ограниченной угловой чувствительностью преобразователя. Целью изобретения является повышение, точности и расширение диапазона устройства. Поставленная цель достигае1ся .тем, что в устройство для измерения угловых перемещений, содержащее магнитную систему, вьшолненную из неподвижного элемента, жестко связанного с корпусом, и подвижного эле- мента, и квантовый датчик, расположенный . - внутри магнитной системы, введены блок за Дания угловой чувствительности, блок выбора диапазонов, вычислительный блок, управляе,мый источник опорного тока и коммутатор, первый вход которого соединен с первым выходом вычислительного блока, второй вход соединен с первым выходрм управляемого источника опорного тока, третий вход .коммутатора подключен к первому выходу блока выбора диапазонов, второй выход которого соединен с первым входом вычислительного блока, второй вход которого подключен к квантовому датчику, выход коммутатора соединен с подвижным элементом магнитной системы, . связанным с блоком выбора диапа.зонов, второй выход уп1}авляемого источника опорного тока соединен с неподвижным элементом магнитной системы, вход управляемого источника опорного тока через блок задания угловой чувствительности соединен с вторым выходом вычислительного блока. На фиг. 1 приведена структурная схема устройства; на фиг. 2 и 3 - дааграммы, поясняющие его работу, Усгройство для измерения углйвых перемещений содержит корпус 1, магнитную систему 2, вьшолненную из неподвижного элемента 3 и подвижного элемента 4, жестко связанного с входным валом 5 (к устройству не относит- ся) и с. валом 6 блока 7 выбора диапазонов, корпус которого жестко соединен с корпусом 1, коммутатор 8, вычислительный блок 9, блок 10 задания угловой чувствительности, управляемый источник 11 опорного тока и квштюый датчик 12Изменение силы тока на выходах уяравляемого источника 11 опорного тока производитс дискретно по сигналам с выхода блока 10 задания угловой чувствительйости. Устройство работает следующим образом. Пусть подвижный элемент 4 магнитной си.схемы 2 развернут на некоторый угол о тноситёльно неподвижного элемента 3 (фиг. 2). По сигналу с первого выхода блока 7 выбора иапазонов коммутатор 8 подключает обмоти подвижного элемента 4 магнитной системы аким образом, что после подачи питания со торого выхода управляемого источника И порного тока на неподвижный элемент 3 магнитной системы 2 и с его первого выхода через коммутатор ,§ на подвижный элемент 4 магнитной системы суммарный вектор магнитой индукщш составляет с оптической осью квантового датчика 12 угол, обеспечнвакьпщй его устойчивую работу. Подача питания с выходов управляемого источника 11 опорного TOKa осуществляется по команде с блока 10 адания угловой чувствительности. При этом . выполняется соотношение (фиг. 2) мин 2 гмакс мин ьмакс нижняя и верхняя грани. цы рабочего диапазона квантового датчика. В результате этого квантовый датчик 12 начинает генерировать с частотой f, пропорциональной углу а:. f KfB Kf BN2(l+cosa 7, где Kf - аналог величины гидромагнвтного : отношения для атома. Модуль угловой чувствительности устройства при этом равен: Грубое определение угла разворота входного вала а производите вычислительным блоком 9 по сигналам с квантового датчика 12 и блока 7 выбора диапазонов по формуле (фиг. 2): « (п-1)- + «, .К. где п - номер диапазона блока выбора диапазонов;К - общее число диапазонов. Погрещность определения а обусловлена ограниченной угловой чувствительносп ю устрой ства в п-м диапазоне. По значению а вьгшслительный блок определяет номер поддиапазона (фиг. 3) и выдает со второго выхода сигнал на коммутатор 8. Происходит переключение обмоток подвижного . элемента 4 таким образом, чтобы угол между . векторами магнитной индукции элемента 4 и элемента 3 соответствовал выбранному поддиапазону т. Одновременно по сигналу с блока 10 задания угловой чувствнтельиоотн увеличивается сила тока на. выходах управляемого источника 11 опорного тока. .При этом вьшолняется соотнощёние (фиг. 3) ZMKii В 8 Макс Частота на выходе квантового датчика f при этом пропорциональна углу а . f Kf в Kf в щг+со,: а модуль угловой п ствительности устройства равен ISl f Точное определение угла разворота входного вала производятся вычнслитеяьным блоком 9 по сигналу с квантового датчика 12 по фор муле oc((m-4)% где m - номер поддиапазона; : g - число поддиапазонов. Погрешность определения о, обусловленная oiyMaMH квантового дafчикa 12, сзщесгаенно снижается вследствие увеличения угловой чув ствительности устройства. Введение блока задания угловой чувствитель ности, блока Bi i6opa диапазонов, коммутатора, вычислительного блока, управляемого источника опорного тока позволяет расогарить диапазон измеряемых углов, уменьшить погрешность Ьбусповленную шумами датчика, за счет увеличения угловой чувствительности устройсгва.Кро ме того, уменьшением Sg (за счет увешетшия а) и использованием квантового датчюса, работающего в низких диапазонах полей, ъяощо существенно уменьшить погрешности в: ствия вращающегося вектора магнитной шщукции с фе фомапштым экраном, обуспст}Квш1 нелинейностью намагничивания экрана. р м у л а р е т е н и я Устройство для измерения угловых перемещений, содержащее магнкгную систему, вьшод,ненную из неподвижного элемента,жестко связанного с корпусом, и подвижного , и квантовый датчик, расположенный внутри магнитной системы, отличающееся тем, что, с целью повышения точности н расширения диапазона устройства, в него введены блок задания-угловой чувствительности, лок выбора диапазонов, вычислительный блок, j nравляемый источник onofworo тока и коммутатор, первый вход которого соеданен с первым выходом вычислительного блока, второй входсоединен с первым выходом управляемого источника опорного тока, треига вход коммутатора подключен к первому выходу блока выбора диапазонов, второй выход которого соеДинен с пертым входом вычислительного блока, второй вход которого подключен к кваятовому датчику, выход коммутатора соединен с подвижным элементом магнитной сжстемь, связа1шым с блоком выбора диапазовов, вто; рой выход управляемого HCtoramca опорного тока соединен с неподвижным элементом магшпкой системы, вход управляемого шлч чш1ка оперного тока через блок задания угловой чувств11тепьности соединен с вторым выходом вычисли гельного блока. Источники информашга, принятые во внимание при экспертизе 1.Авторское (яцдетельство СССР И 5907%, кл. G 08 С 9/04, 1976. 2.Авторское свидетепьство СССР № 600386, кл. G 01 В 7/30, 1976 Гпоототип).
