1
Изобретение относится к устройстваи йзтоматического контроля угла поворота для систем управления машинами и другими объектами, работающими во вэрыворпасных условиях и в условиях радиации.5
Известны датчики угла поворота с магнитоуправлнемыми контактами,содержащий статор, на котором размеще.ны магнито;управляемые контакты, и ротор с nocfcf янными магнитами. Поворот ротора вызы-ю вает срабатывание контактов в определенной последовательности: на выходе датчика формируются с определенной разрешающей способностью кодовые комбинации . Дли увеличения диапазона из-151 |мерения датчики снабжены секциями гру|бого и точного otсчета t соединенньами между собой хйнематическй. Кинематичес|кая передача усложняет к6йС Трукцию дат;чика, снижаеИЕ eitQ -точности и увеяйчиг- 20
ваег paзмeIйa... ,--.Л , : ;;, . :-, . ,-:. Наиболее близкий твхмичеЫсимршйёнйjBM к изобретению являете и да:тчйк угла |поворота вала содержащий нвподвийсййе :; диски, на одном.из которых расположе- 2
ны с равным шагом cKpeTHpctMMarHM-. тоуправляемые контакты, ;|одни концы крг I Чторых объединены и подключены к истОч нику питания, а на другом диске ложены постоянные магниты. Между не.
подвижными дисками размещен подвижный экранирующий диск с радиальными вырезами З j .
Подвижный диск имеет пазы. Если между магнитоуправляемым контактом и магнитом находится паз, то под действием магнитного потока контакт срабатывает, если между контактом и магнитом находится экран, то магнитный поток экранируется и контакт не срабатывает.
Наличие двух секций для грубого и . точного отсчета усложняет конструкцию датчика, увеличивает его стоимость и габаритные размеры.
Целью изобретения является упрощение конструкции датчика при той же разрешающей способности.
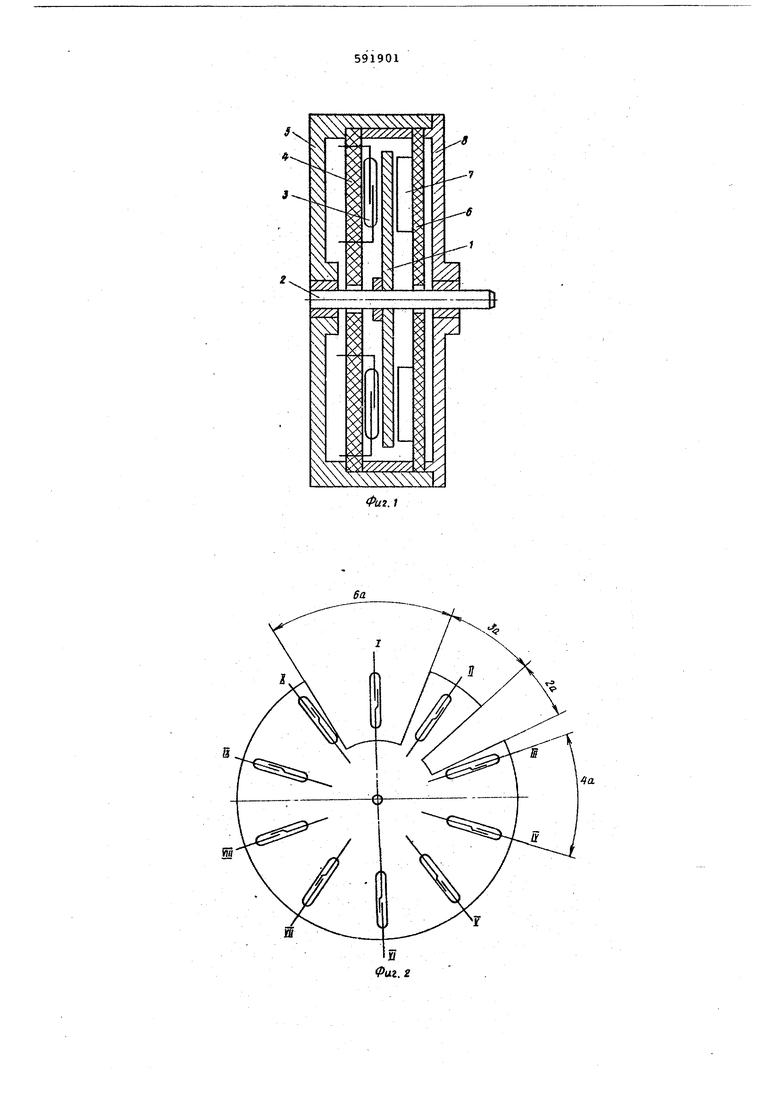
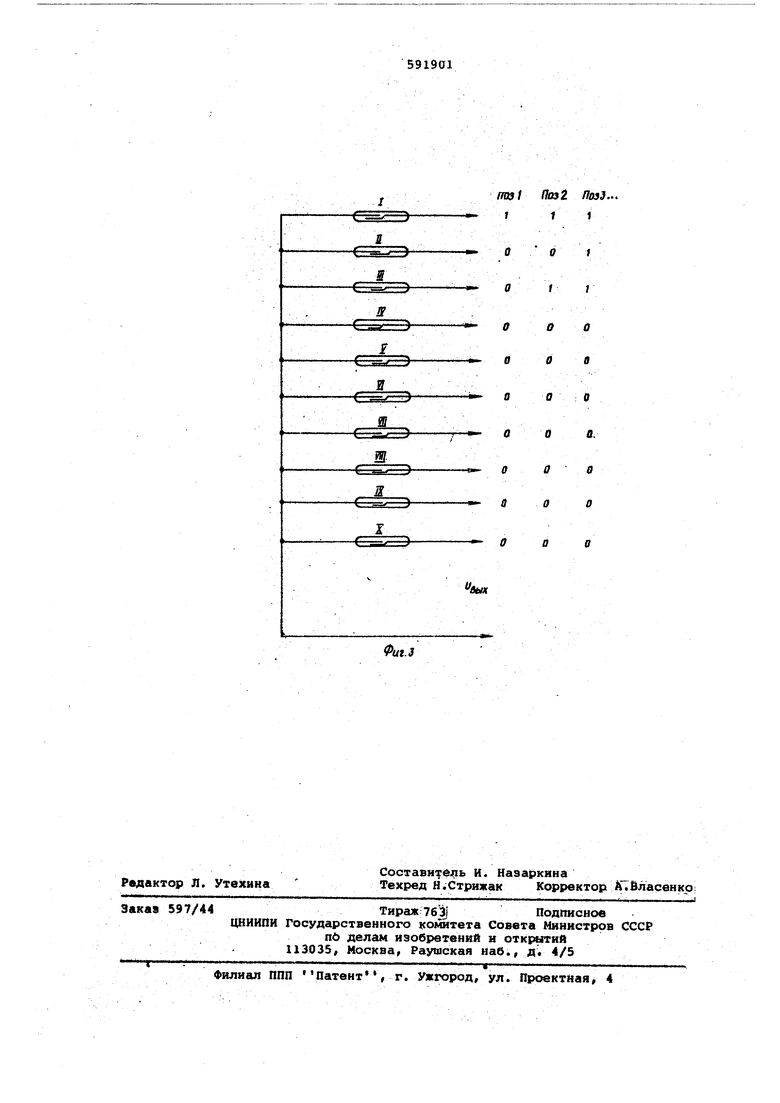
Указанная цель достигается за счет того, что в предложенном датчике на йойвйжном экранирующем диске радиальные : йырезы выполнены один of другого на :& асс оянии З а с угловым расстояИИем 6а и 2а {где а - шаг дискретнос:ти: датчика). Форма экранирующего диска .поЭвйЛйёт ф01 мировать на выходе датчика- Однопёрёменный код. Каждому дискретному положению вала датчика соот jsefcTsyiST определенная кодовая комбийгщия: --На фиг. I изображен датчик в общем виде на фиг. 2 - расположение магнитоуправляемых контактов и экранирующи диск в общем виде на фиг. 3 - Схема электрических соединений,
Число магнитоуправляемых контактов определяется необходимой разрешающей способностью. Для простоты рассмотрев, датчик с десятью магнитоуправляемьаш контактами (1-|).,Шаг дискретности датчика 01 а 9°, yrjioBoe расстояние между магнитоуправляемыми контактами 36, величина радиальных вырезов экранирующего диска 18°, угловое расстояние мечоду вырезами - 27.
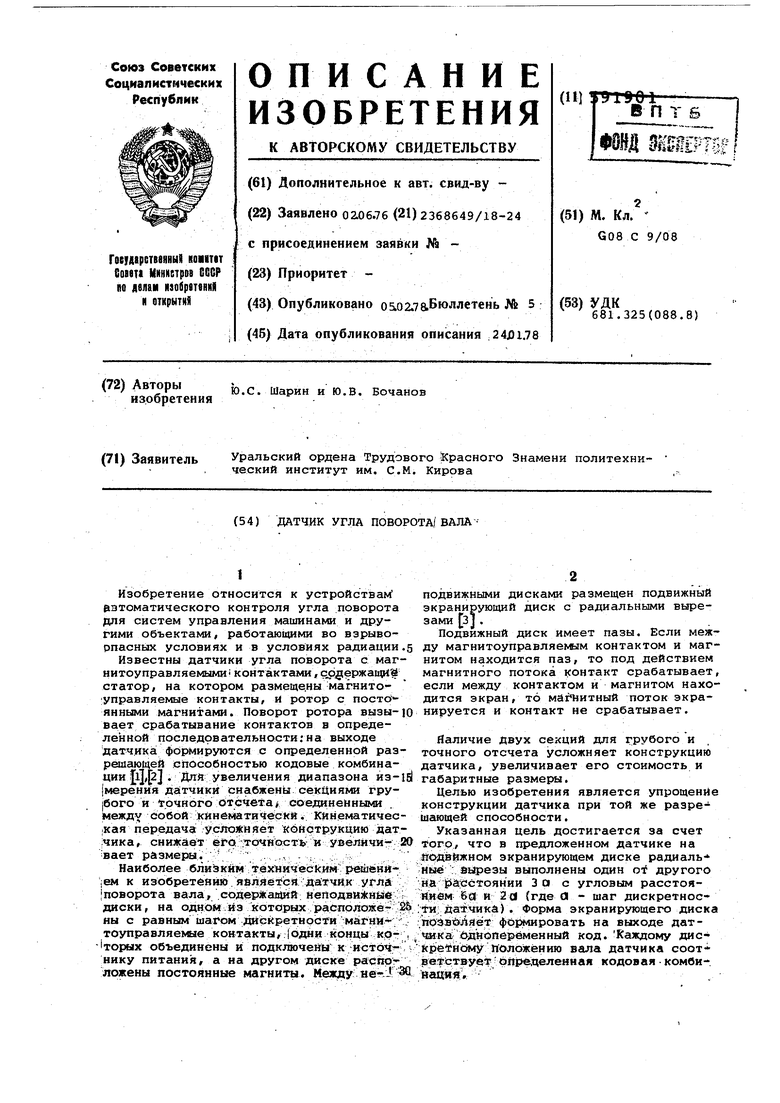
Датчик угла поворота вала содержит подвижный экранирующий диск 1 из магнитомягкого материала:/: жестко зак-репленный на валу 2.; магнитоуправляемые контакты 3 расположены на неподвижном диске 4 из немагнитного материала который закреплен в корпусе 5. Магнитоуправляемые контакты одними выводами соединены с общей шиной, а другие формируют комбинацию на выходе датчика (фиг. 3). В неподвижном диске 6 расположены постоянные магниты 7. Постоянные магниты расположены так, что каждый из них .находится против соответствующего магнитоуправляемого контакта. Диск 8 и корпус 5 выполнены из немагнитного материала. Все устройство неподвижно, кроме вала 2 и экранирующего диска 1 с радиальными вырезами.
Датчик работает следующим образом.
Если между контактами и магнитом находится паз, то под влиянием магнитного потока контакт срабатывает, если между контактом и магнитом находится экран, то последний экранирует магнитный поток и контакт не срабатывает. В исходном положении вырез 6.а находится против контакта 1, остальные контакты экранированы диском 1. На выходе датчика.будет комбинация 1000000000 (фиг. 3). При повороте вала по часовой стрелке на один шаг контакт 1 остается замкнутым, паз 2 а перекрывает контакт ffi, последний срабатывает. На
выходе появляется ксялбинация 1010000000... Всего формируется сорок комбинаций однопеременного йода в следующей последовательности: сначала комбинации - 1000000000, 1010000000, 1110000000, 1100000000,
затем эти же комбинации после однократного циклического сдвига вправо ОЮООООООО, 0101000000,...,
затем эти же комбинации после двухкратного циклического сдвига вправо
0010000000, - 010100000,... и т.д.
Предлагаемый датчик угла поворота Вала позволяет реализовать Однопеременный помехоустойчивый код, имеет простую конструкцию, высокую надежность, низкую стоимость и малые габаритные размеры.
Формула изобретения
Датчик угла поворота вала, содержащий неподвижные диски, на одном из которых расположены с равным шагом
дискретности Магнитоуправляемые контакты, одни концы которых объединены и подключены к источнику питания, а на другом диске расположены пос,тоянHtJe магниты, между неподвижными дисками размещен подвижный экранирующий диск с р.адиальными вырезами, о т л ич а ю щи и с я тем, что, с целью упрощения датчик а, на подвижном экЬ анируюг щем диске радиальные вырезы выполнены с угловым расстоянием 6 а и 2 о, один от другого на расстоянии Зо( (где а - шаг дискретности датчика).
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 468285, кл. Q08 С 9/04, 1973.
2.Авторское свидетельство СССР 364010, кл. G08 С 9/08, 1971.
3.Авторское свидетельство СССР 399897, кл. GOB С 9/04, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛА ПОВОРОТА | 1973 |
|
SU399897A1 |
| ДАТЧИК УГЛА ПОВОРОТА | 1970 |
|
SU279372A1 |
| Преобразователь угол-код | 1974 |
|
SU517918A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПЕРЕКЛЮЧАТЕЛЬ | 1973 |
|
SU378985A1 |
| СИСТЕМА ПИТАНИЯ ГАЗОВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2184263C2 |
| Командоаппарат | 1980 |
|
SU888236A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU947894A1 |
| Преобразователь угла поворота в код | 1978 |
|
SU752429A1 |
| Система адресования груза для распределительных конвейеров | 1972 |
|
SU438591A1 |
| Система управления автоматической роторной машиной | 1975 |
|
SU763854A1 |