Изобретение касается машины для перебрасывания картовых труб, устанавливаемой на гусеничном ходу и снабженной фермой, несущей бесконечную цепь с захватами, выполненными в виде двух прикрепленных к цепям рычагов, из которых один установлен поворотно.
В предлагаемой машине, с целью автоматизации захватывания, транспортирования и освобождения трубы, короткие плечи задних захватных рычагов надеты на полуоси двух пар роликов, катящихся между полками швеллера фермы, передние же поворотные рычаги надеты на полуоси двух передних роликов, и короткие их плечи несут на концах ролики, для управления которыми ферма снабжена соответствующими вырезами и направляющими.
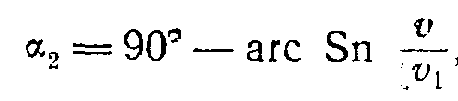
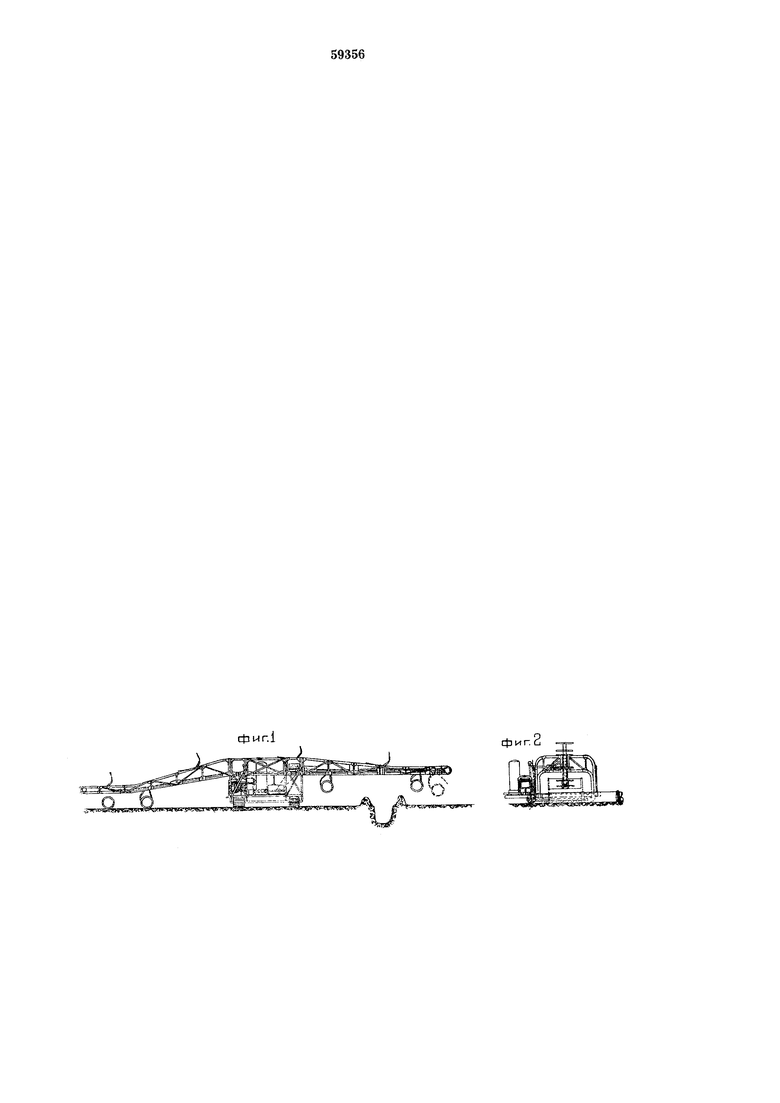
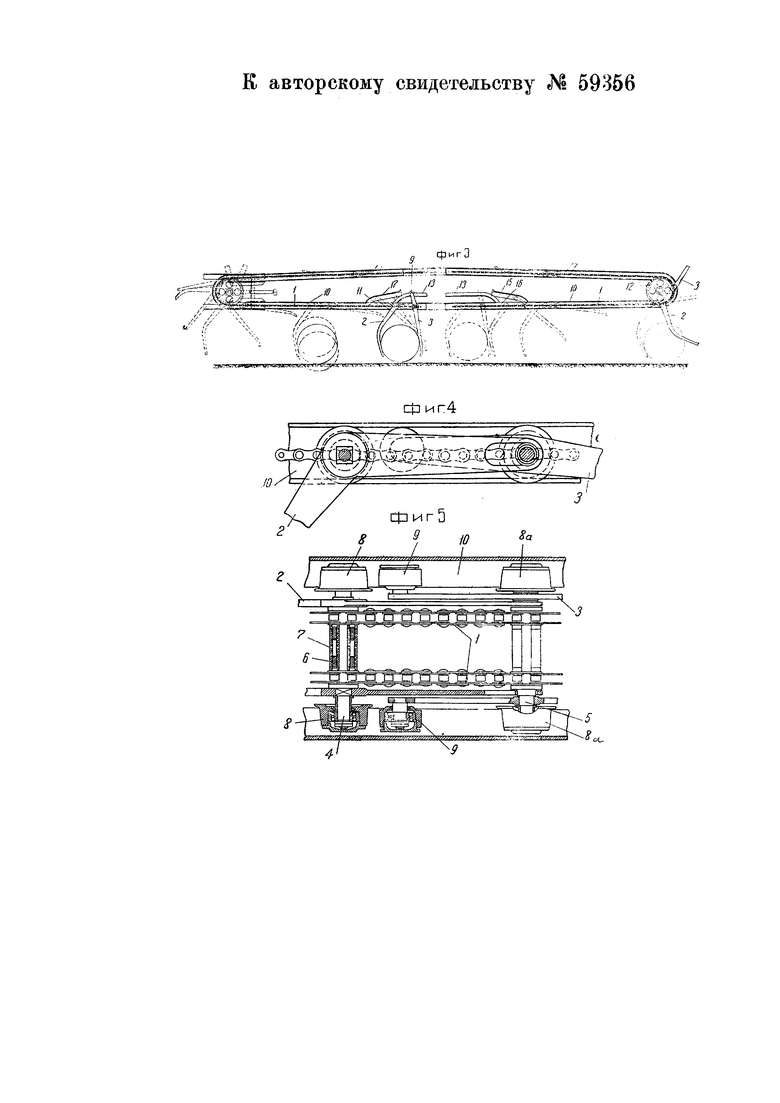
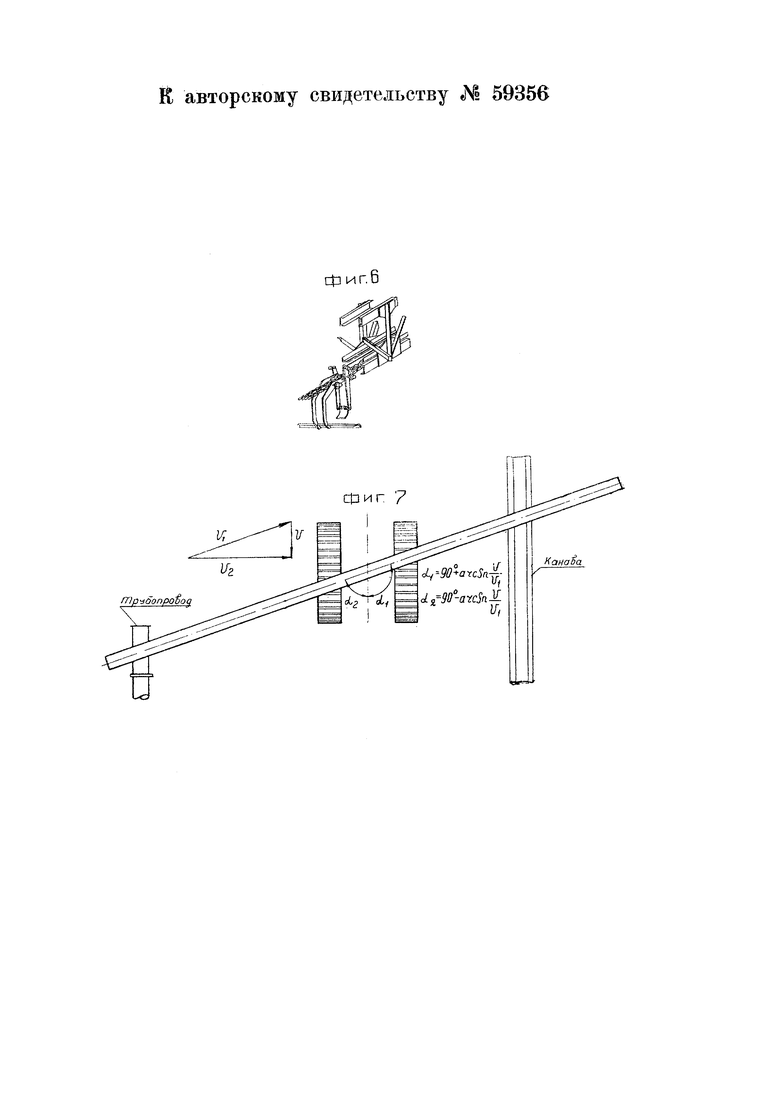
На чертеже фиг. 1 изображает общий вид машины спереди; фиг. 2 - то же вид машины сбоку; фиг. 3 - ферму с расположенными на ней бесконечной цепью, выемками и направляющими для управления подвижными захватными рычагами; фиг. 4 - прикрепление рычагов к бесконечным цепям - вид сбоку; фиг. 5 - то же вид сверху; фиг. 6 - перспективный вид части фермы с цепями и рычага ми; фиг. 7 - схему установки фермы на подвиге машины по отношению к трубопроводу.
Машина включает в себе ферму 10, несущую две параллельные бесконечные цепи 1, приводимые в движение цепными колесами 12. К цепям прикреплено несколько комплектов захватных рычагов 2 и 3. Рычаги 2 насажены на полуоси 4, а рычаги 3 - на полуоси 5. Полуоси 4 и 5 своими пальцами вставляются в проушины цепей и жестко соединяются между собой при помощи трубок 7, навинчиваемых на пальцы 6. Рычаги 2 своими короткими плечами надеваются на полуоси 5, что позволяет сохранить вполне определенное положение рычагов 2 по отношению к ферме. Рычаги 3 на своих коротких плечах снабжены полуосями с насаженными на них роликами 9. Положение рычагов 3 относительно фермы определяется положением роликов 9. При качении этих роликов внутри полок швеллеров фермы длинные плечи рычагов 3 находятся в прижатом положении к ферме. На полуоси 4 и 5 насаживаются ролики 8, воспринимающие всю нагрузку от движущихся частей. Ролики 8 при движении цепей катятся по полкам швеллеров фермы 10 (фиг. 3-5).
Работа машины заключается в следующем.
При движении цепей происходит сначала захват трубы и ее перемещение рычагами 2. Рычаги 3 в это время находятся в приподнятом к ферме положении и свободно проходят над трубой. При проходе выемок 11 рычаги 3 под действием собственного веса опускаются впереди труб, направляясь в своем движении взаимодействием роликов 9 с направляющими уголками 17 и 13. При проходе выемок 16 и встрече роликов 9 с направляющими уголками 15 длинные плечи рычагов 2 приподнимаются к ферме, освобождая трубу. При дальнейшем перемещении цепей длинные плечи рычагов 2 остаются прижатыми к ферме до встречи с выемками 11, где происходит схватывание труб рычагами, как описано выше.
Форма устанавливается на подвиге под углом  к направлению передвижения машины, определяемом из выражения
к направлению передвижения машины, определяемом из выражения
или 
где v - скорость машины, а  - скорость цепи.
- скорость цепи.
При этом условии труба будет перемещаться перпендикулярно к оси трубопровода со скоростью  (фиг. 7).
(фиг. 7).
1. Машина для перебрасывания картовых труб, установленная на гусеничном ходу и снабженная фермой, несущей бесконечные цепи с захватами, выполненными в виде двух прикрепленных к цепям рычагов, из которых один установлен поворотно, отличающаяся тем, что, с целью автоматизации захватывания, транспортирования и освобождения трубы, короткие плечи задних захватных рычагов 2 надеты на полуоси двух пар роликов 8 и 8а, катящихся между полками швеллера, передние же поворотные рычаги 3 надеты на полуоси двух передних роликов 8а, и короткие их плечи несут на концах ролики 9, для управления которыми ферма снабжена соответствующими вырезами и направляющими.
2. Форма выполнения машины по п. 1, отличающаяся тем, что ферма, несущая бесконечные цепи, снабжена на одном конце выемками 11 и направляющими 17, назначенными для поворота рычага 3 и захвата труб рычагами при опускании их действием собственного веса, а на другом конце - выемками 16 и направляющими 15, назначенными для принудительного подъема рычагов 3 при сбрасывании труб.
3. Форма выполнения машины по пп. 1 и 2, отличающаяся тем, что для удержания рычагов 3 в рабочем положении в период транспортировки труб ферма снабжена направляющими 13.
