Изобретение относится к устройству для динамического накопления изделий и к звеньевой цепи для устройства для динамического накопления изделий. Такое устройство, известное, например, из US 4413724 или ЕР 1275603 А1, позволяет благодаря плавному ходу каретки в обоих направлениях быстро и точно приводить накопительную способность в соответствие с условиями на входном и выходном участках и, следовательно, обеспечивать, например, динамическую связь между двумя машинами с разной производительностью. При этом является характерным, что все изделия, поступившие на входной участок и отобранные на выходном участке, при любом режиме проходят весь участок транспортировки переменной длины, который поэтому служит как для транспортировки, так и для накопления. Позиционирование или перемещение каретки обеспечивается автоматически двумя приводными механизмами транспортирующего средства, которое во время транспортировки от входного участка до выходного изделия находятся на транспортном средстве без надвижения один на другой.
Однако не является совершенной боковая направляющая для свободно стоящих на транспортирующем средстве изделий, в частности на участке поворотов. Поэтому для транспортировки с высокой скоростью изделий с малой устойчивостью, например пустых пластмассовых бутылок, известные динамические накопители не пригодны.
Кроме того, гибкие транспортирующие средства в известных устройствах, состоящие из звеньевых цепей, установлены на стационарных направляющих в основном со скольжением, вследствие чего происходит сильный износ. В устройстве из ЕР 1275603 дополнительная трудность состоит в том, что при спиральном выполнении переменного участка транспортировки в направлении внутренней части дуги звеньевых цепей действуют большие тяговые усилия. В этом известном устройстве на участке поворотов каретки требуется, кроме того, выводить звеньевую цепь из зацепления со стационарными направляющими, причем это приходится делать встречно действующим внутрь дуги тяговым усилиям. Предложенные решения подъема звеньевой цепи с помощью вращающегося концевого диска или опускания направляющего элемента внутри дуги оказались непригодными для практического длительного применения при большой скорости транспортировки.
В основу изобретения положена задача обеспечить при использовании аналогичного устройства динамического накопления изделий с помощью простых средств бесперебойную транспортировку малоустойчивых изделий с высокой скоростью, в частности в случае спирального или винтового выполнения участка транспортировки.
Данная задача решается согласно изобретению благодаря признакам, приведенным в п.1 формулы изобретения.
В устройстве согласно изобретению исключается смещение, опрокидывание изделий. Расстояние между изделиями при перемещении по переменному участку транспортировки постоянно выдерживается точным, вследствие этого изделия при прохождении в устройстве сохраняют свою ориентацию. Поэтому устройство согласно изобретению может быть непосредственно подключено, например, к выпускным звездочкам первой машины и подающим звездочкам второй машины. При этом динамический накопительный эффект совершенно не нарушается, и не требуются дополнительные устройства для ритмичности перемещения изделий. Также с помощью транспортирующего средства возможна целевая обработка, сортировка или распределение изделий по нескольким дорожкам.
Оптимальные варианты развития изобретения приведены в зависимых пунктах формулы изобретения. Направляющие ролики обеспечивают эксплуатацию устройства при значительной экономии энергии и низком износе, причем подвижное расположение некоторых направляющих роликов упрощает выведение или введение в зацепление транспортирующего средства со стационарными направляющими.
Ниже приводится описание примеров выполнения изобретения со ссылкой на чертежи. При этом изображено:
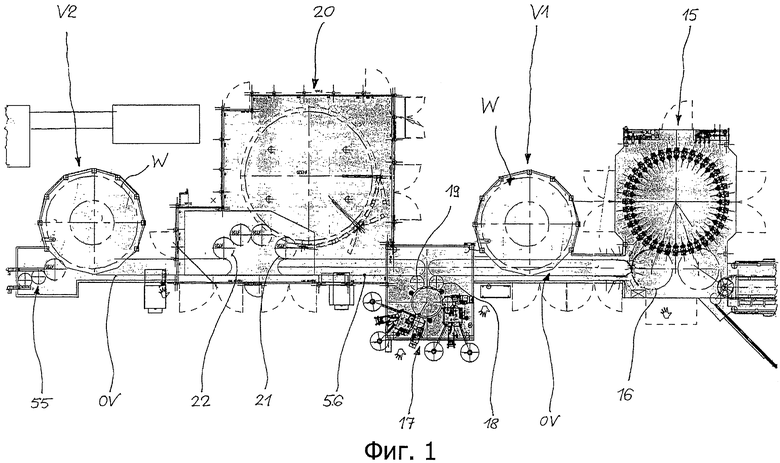
фиг.1 - схематический вид сверху на установку для изготовления и заполнения бутылок из полиэтилентерефталата с двумя встроенными динамическими накопителями,
фиг.2 - схематическая траектория транспортирующего средства динамического накопителя на фиг.1,
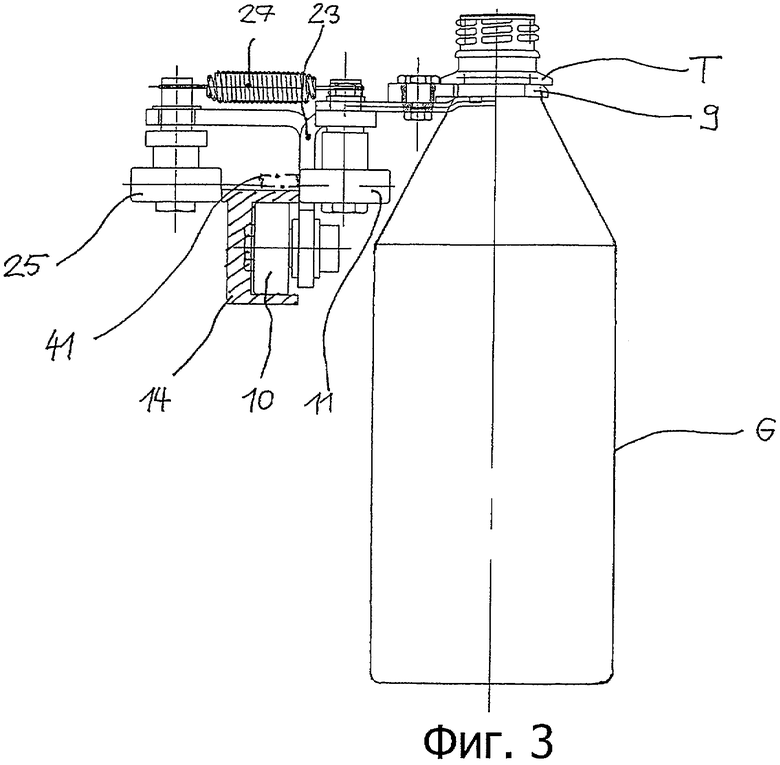
фиг.3 - разрез по А - В на фиг.2,
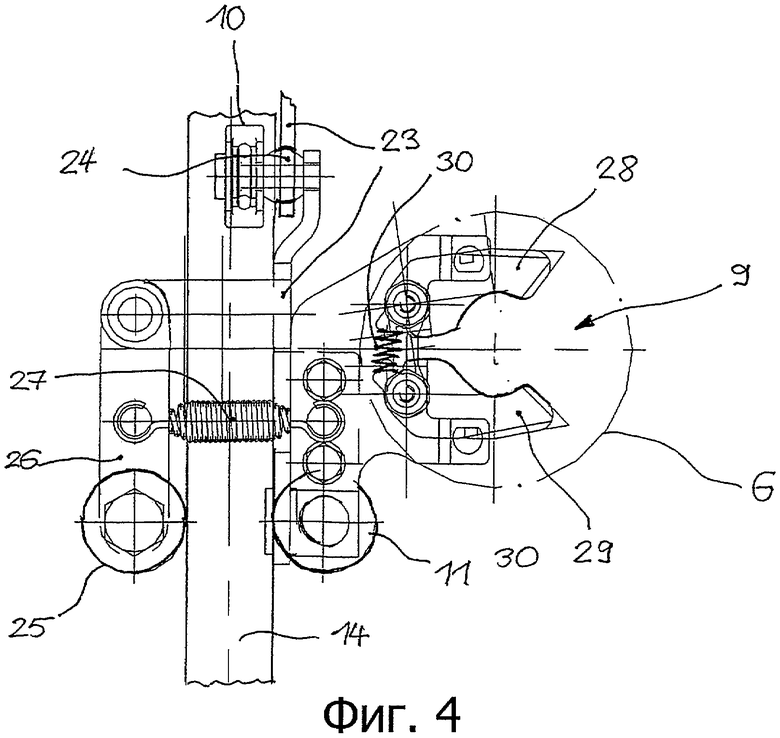
фиг.4 - вид С на фиг.2,
фиг.5 - вид сверху на приводную станцию транспортирующего средства,
фиг.6 - вертикальный разрез по приводной станции транспортирующего средства,
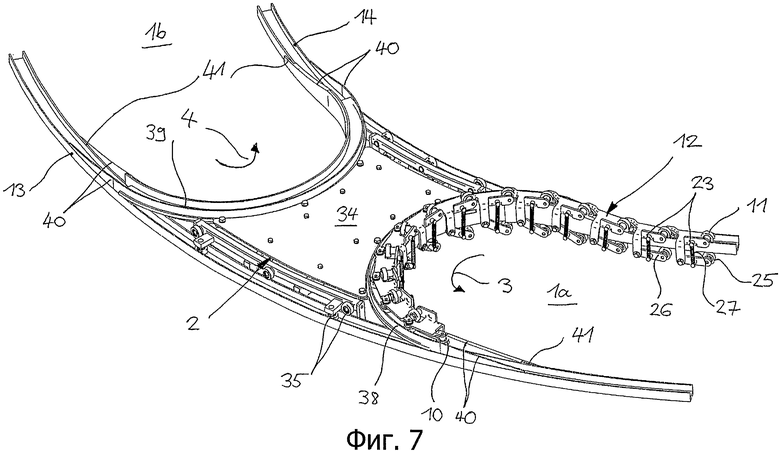
фиг.7 - вид в перспективе на каретку динамического накопителя на фигурах 1-6,
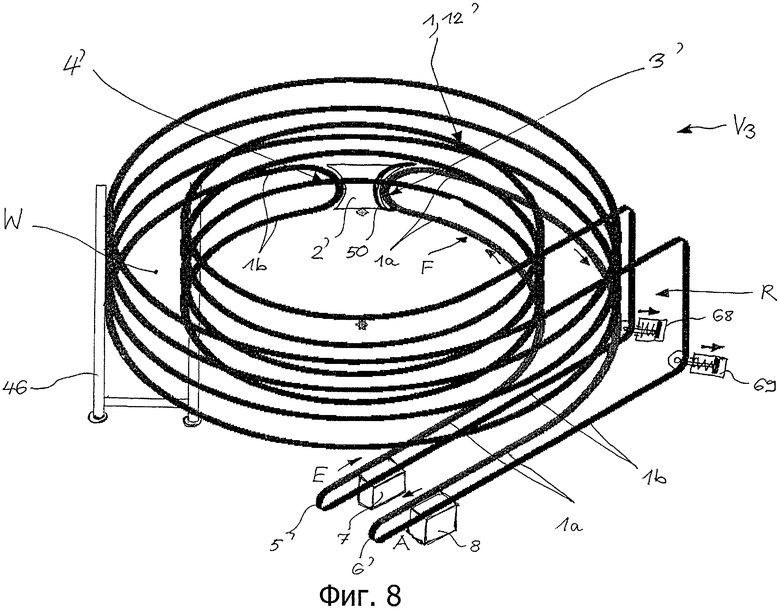
фиг.8 - схематическая траектория транспортирующего средства динамического накопителя согласно другому варианту выполнения,
фиг.9 - подробное изображение транспортирующего средства динамического накопителя на фиг.8,
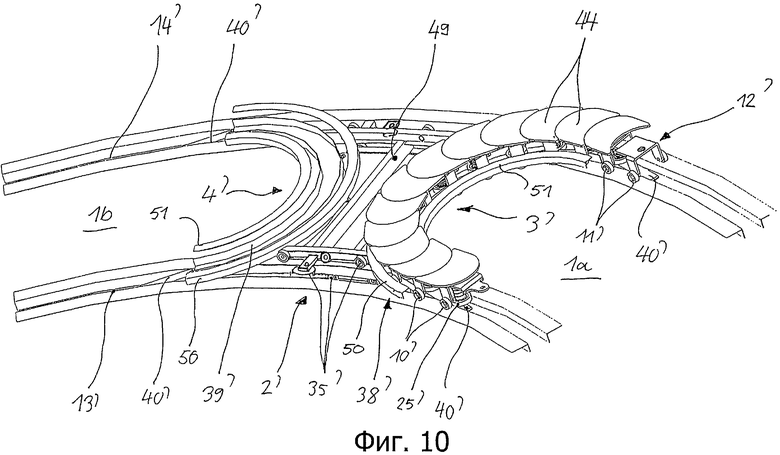
фиг.10 - вид в перспективе на каретку динамического накопителя на фиг.8,
фиг.11 - вид снизу на каретку с шарнирами,
фиг.12 - частичный вид сверху на транспортирующее средство с подвижными захватами,
фиг.13 - вид в перспективе на звено цепи с поворотным направляющим роликом,
фигуры 14, 15 - виды в перспективе на транспортирующее средство с направляющими роликами, способными совершать ножничное поворотное движение,
фиг.16 - вид сбоку на транспортирующее устройство с направляющими роликами, способными совершать рычажные повороты,
фиг.17 - вид в перспективе на транспортирующее средство на фиг.16,
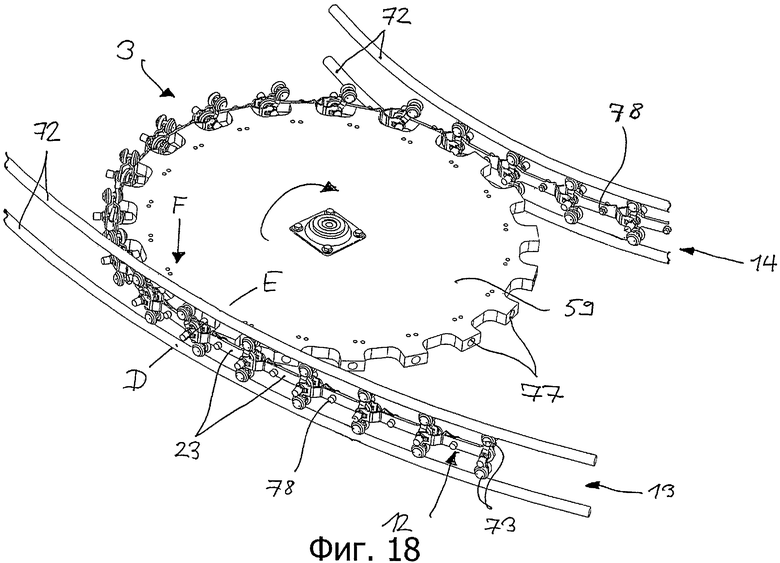
фиг.18 - вид в перспективе на поворот транспортирующего средства на фигурах 16, 17 без управляющих вилок,
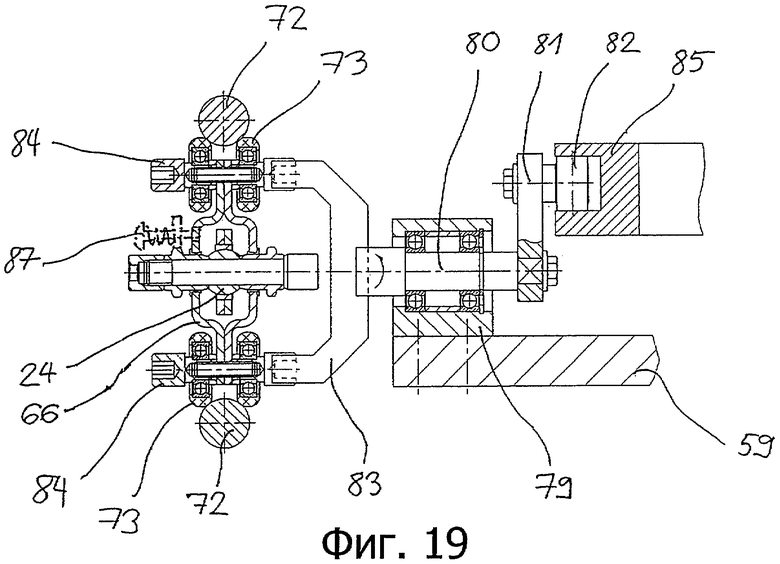
фиг.19 - разрез по D-Е на фиг.18 с управляющей вилкой,
фиг.20 - вид F на фиг.18,
фиг.21 - разрез по другому варианту выполнения роликовой цепи с рычажно-поворотными направляющими роликами,
фиг.22 - вид в перспективе на другой поворот транспортирующего средства на фигурах 16, 17,
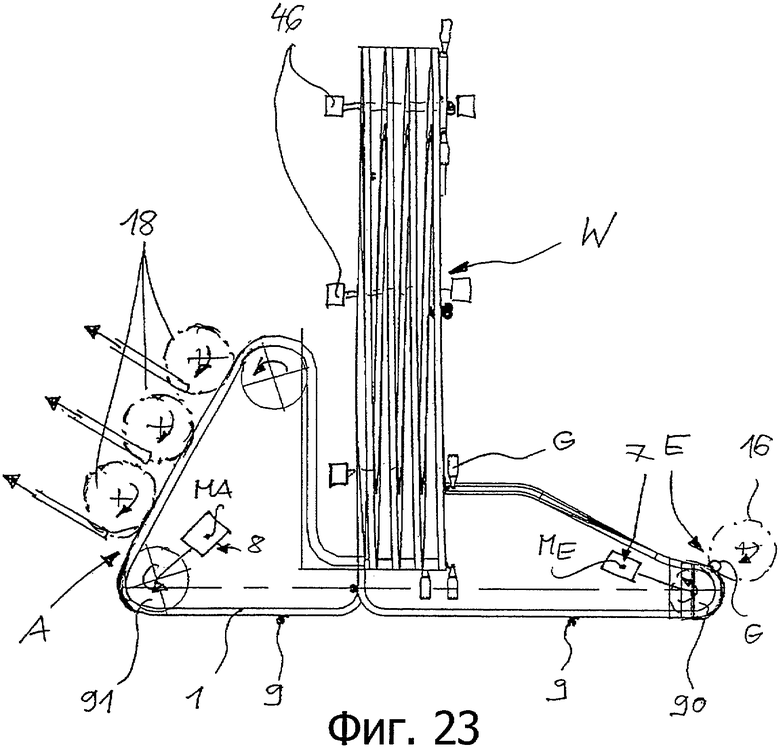
фиг.23 - вид сверху на динамический накопитель с горизонтальной спиральной осью,
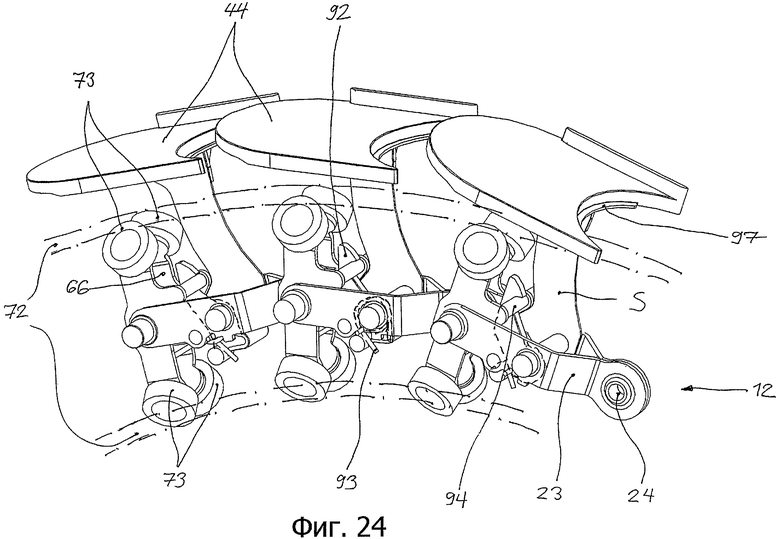
фигуры 24, 25 - виды в перспективе на другой вариант выполнения транспортирующего средства,
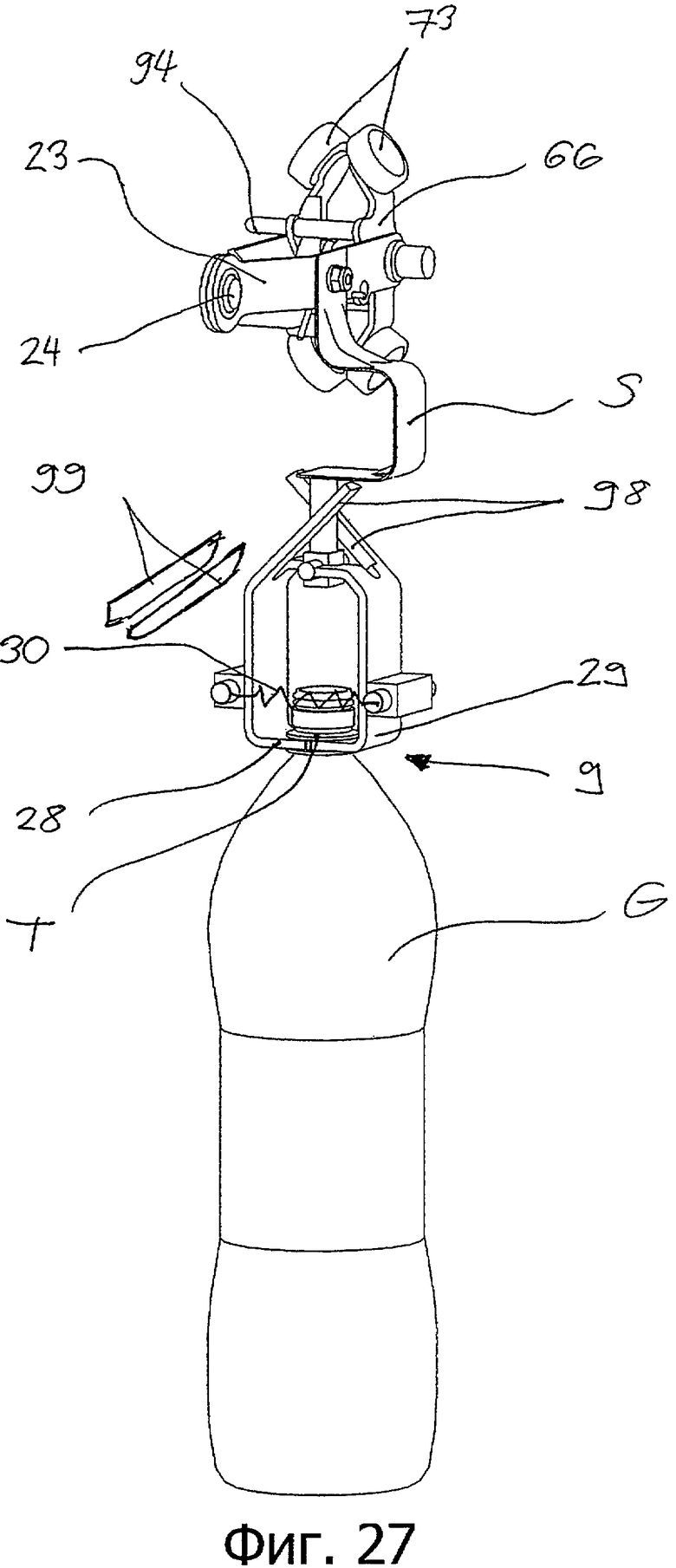
фигуры 26, 27 - виды в перспективе на транспортирующее средство на фигурах 24, 25 с разными захватами,
фиг.28 - вид в перспективе на каретку для транспортирующего средства на фигурах 24, 25, частично без роликовой цепи.
Установка на фиг.1 предназначена для изготовления, этикетирования, розлива, укупорки и упаковки изделий в виде бутылок из полиэтилентерефталата для напитков, называемых ниже бутылками G, которые в своей верхней части снабжены опорным кольцом Т. Установка состоит из вращающейся машины 15 для выдувания бутылок с выпускной звездочкой 16, вращающейся этикетировочной машины 17 с подающей 18 и выпускной 19 звездочками, вращающейся разливочно-укупорочной машины 20 с подающей 21 и выпускной 22 звездочками, а также из не показанной упаковочной машины обычной конструкции. Каждая машина снабжена отдельным, не показанным двигателем, которым она приводится в действие вместе со звездочками непрерывно с переменной скоростью. Между машиной 15 для выдувания бутылок и этикетировочной машиной 17, а также между разливочно-укупорочной машиной 20 и не показанной упаковочной машиной располагается динамический накопитель V. Первым динамическим накопителем V1 пустые бутылки G подаются непосредственно от выпускной звездочки 16 машины 15 для выдувания бутылок к подающей звездочке 18 этикетировочной машины 17, а второй динамический накопитель V2 подает снабженные этикетками, заполненные и укупоренные бутылки G непосредственно от выпускной звездочки 22 разливочно-укупорочной машины 20 в распределительное устройство 55, расположенное перед упаковочной машиной. От выпускной звездочки 19 этикетировочной машины 17 до подающей звездочки 21 разливочно-укупорочной машины 20 бутылки G перемещаются посредством простой бесконечной цепи 56 с захватами без функции динамического накопления. В соответствии с этим этикетировочная машина 17 и разливочная машина 20 приводятся в действие при нормальном режиме абсолютно синхронно.
Динамический накопитель V1, показанный на фигурах 1-7, состоит в основном из единственного бесконечного транспортирующего средства 1 в виде роликовой цепи 12 с захватами 9, стационарных направляющих 13, 14 для роликовой цепи U-образного сечения, перемещающейся по направляющим 13, 14 каретки 2 с первым поворотом 3 под углом 180° и вторым поворотом 4 под углом 180° для роликовой цепи, входного участка Е с третьим поворотом 5 под углом 180° и первым приводным механизмом 7 и выходного участка А с четвертым поворотом 6 под углом 180° и вторым приводным механизмом 8 для роликовой цепи 12. Все четыре поворота 3-6 под углом 180° расположены в основном горизонтально.
Третий и четвертый повороты 5, 6 образуют вместе с подключенными параллельными соосными ветвями направляющих 13, 14 некоторое подобие вытянутого овала OV, являющегося разомкнутым только в середине. К местам разрыва примыкают винтовой или спиральный участок W и вертикальная обратная направляющая R для порожней ветви 1b роликовой цепи 12.
Как изображено на фигурах 3-7, роликовая цепь 12 содержит множество одинаковых звеньев 23 цепи, связанных подвижно между собой через сферические опоры 24 подобно кардану. На каждом звене 23 цепи расположено с возможностью вращения три направляющих ролика 10, 11, 25. Направляющий ролик 10 установлен непосредственно на звене 23 цепи и заходит в выполненное в виде канавки углубление в направляющих 13, 14. Направляющий ролик 11 также расположен непосредственно на звене 23 цепи, при этом его ось вращения смещена по отношению к оси вращения ролика 10 на 90° и примыкает к свободному концу U-образного колена направляющих 13, 14, расположенного вверху на входном Е и выходном А участках. Направляющий ролик 25 расположен на качающемся рычаге 26, который, в свою очередь, установлен с возможностью поворота на звене 23 цепи. Поворотная ось качающегося рычага 26 и ось вращения направляющего ролика 25 располагаются параллельно оси вращения направляющего ролика 11, причем направляющий ролик 25 примыкает к месту перехода от U-образного колена к перемычке направляющих 13, 14 приблизительно на одинаковом уровне, что и направляющий ролик 11. Между звеном 23 цепи и поворотным рычагом 26 вставлена пружина растяжения 27, которой направляющий ролик 25 прижимается к направляющим 13, 14. За счет этого достигается точное направление каждого звена 23 цепи по направляющим 13, 14 и требуется незначительное усилие.
На каждом звене 23 цепи расположен пассивный захват 9 в виде упругого клещевого захвата. Каждый захват 9 содержит два захватных рычага 28, 29, установленных на звене 23 цепи с возможностью поворота и поджимаемых в положение захвата упругим элементом 30. Выемки в захватных рычагах 28, 29 выполнены такой формы, чтобы бутылка G охватывалась ими ниже опорного кольца Т более чем на 180° и за счет этого фиксировалась на транспортирующем средстве 1. При заталкивании бутылки G в захват 9 и при ее извлечении из него захватные рычаги 28, 29 упруго отклоняются; поэтому для них не требуется отдельного принудительного управления. Несмотря на это бутылки G точно и надежно фиксируются на транспортирующем средстве 1 захватами 9. При этом захваты занимают показанное на фиг.3 горизонтальное положение на входном Е и выходном А участках, при котором средняя ось каждой бутылки G проходит вертикально. При этом захват 9 располагается на внешней стороне траектории транспортирующего средства 1, а именно на открытой стороне направляющих 13, 14. Последние расположены на входном Е и выходном А участках таким образом, что открытая сторона U-образного профиля обращена горизонтально к внешней стороне траектории движения. На этих участках вес бутылок G и роликовой цепи 12 приходится на направляющие ролики 10, при этом направляющие ролики 11 и 25 обеспечивают боковое направление роликовой цепи 12.
Привод роликовой цепи 12 обеспечивается двумя идентично устроенными приводными механизмами 7, 8 на входном Е и выходном А участках. Каждый приводной механизм 7, 8 содержит два зубчатых колеса 31, 32 одинакового размера с вертикальной осью вращения, которые приводятся в действие с переменной скоростью кинематической системой 33 и электродвигателем ME, MA. Зубчатые колеса 31, 32 снабжены по своему периметру выемками, в которые заходят оси направляющих роликов 11. Зубчатые колеса 31, 32 смещены между собой на половину шага t роликовой цепи, т.е. на величину расстояния между двумя захватами 9, для обеспечения равномерного привода. Приводные механизмы 7, 8 заходят со стороны захватов 9 в зацепление с роликовой цепью 12 и поэтому располагаются на свободной от бутылок, порожней ветви 1b роликовой цепи 12.
Как показано на фиг.7, каретка 2 содержит практически горизонтальную опорную плиту 34 и установлена посредством нескольких роликов 35 с вертикальной и горизонтальной осью вращения с возможностью перемещения по двум направляющим 13, 14. Эти направляющие установлены точно равноудаленными на участке движения каретки 2, т.е. на винтовом или спиральном участке W пути подачи F, и своим отверстием в виде канавки обращены вверх. Переход из показанной на фигурах 3 и 4 позиции направляющих 13, 14 с боковым отверстием в упомянутую выше позицию с отверстием вверху происходит через две скрученные зоны 36, 37, из которых первая зона образована возле входного участка Е, и вторая зона - вблизи от выходного участка А, соответственно на участке транспортирующей ветви 1а. Благодаря связи между звеньями 23 цепи, обеспечиваемой сферическими опорами 24, трудностей при этом не возникает. Бутылки G, зафиксированные захватами 9 на роликовой цепи 12, перемещаются из своего нормального вертикального положения в горизонтальное положение накопления. Такое горизонтальное положение накопления бутылок G и соответствующее вертикальное положение захватов 9 сохраняется на всем участке транспортирующей ветви 1а между обоими скрученными участками 36, 37, а также на участке каретки 24.
Каретка 2 содержит первый поворот 3 под углом 180° для транспортирующей ветви 1а роликовой цепи и второй, расположенный напротив поворот 4 под углом 180° для порожней ветви 1b роликовой цепи 12. Для большей наглядности роликовая цепь 12 показана на фиг.7 частично, по этой же причины не показаны захваты и бутылки. Их положение на участке первого поворота 3 хорошо видно на фиг.2. Здесь можно также видеть, что бутылки G перемещаются в горизонтальном положении по опорной плите 34 вместе с роликовой цепью 12 от стационарной направляющей 14 к стационарной направляющей 13. Для обеспечения такого перемещения на опорной плите 34 закреплены две полукруглые направляющие дуги 38, 39 с U-образным, открытым вверх сечением. Направляющие дуги 38, 39 перекрывают своими концевыми участками стационарные направляющие 13, 14 и переходят в скошенные направляющие 40, расположенные строго соосно с верхними кромками неподвижных направляющих 13, 14. Для обеспечения беспрепятственного перехода на концах направляющих 40, лежащих на внутренней стороне дуг, расположены сбоку, возле направляющих 13, 14 клинья 41. Эти клинья 41 воздействуют на расположенные вверху направляющие ролики 11, выполненные несколько более широкими, чем боковые полки стационарных направляющих 13, 14. Положение клиньев 41 показано штрихпунктирной линией на фиг.3, причем изображение необходимо развернуть мысленно вправо на 90°.
Благодаря описанному выше выполнению каретки 2 обеспечивается положение, при котором транспортирующая ветвь 1а и порожняя ветвь lb роликовой цепи 12 на участке первого поворота 3 и второго поворота 4 мягко и плавно перемещаются вверх от одной из направляющих и после прохождения поворота снова мягко опускаются на другую направляющую. Выражаясь точнее, подъем производится воздействующими на ролики 11 клиньями 41 и направляющими 40, при этом пружинящие направляющие ролики 25 смещаются под действием растяжения пружин 27, но вследствие предварительного напряжения пружины исключается выход из зацепления или подъем роликовой цепи 12. Направляющие ролики 10 входят в открытую канавку направляющих дуг 38, 39 и обеспечивают при этом точное боковое направление. Такая заданная функция является идентичной как в состоянии покоя каретки 2, так и при ее движении.
Точное боковое направление роликовой цепи 12 на участке поворотов 3, 4 имеет большое значение для функционирования динамического накопителя V1, так как движение каретки 2 происходит единственно под действием тягового усилия роликовой цепи 12: если транспортирующая ветвь 1а укорачивается вследствие соответствующей разницы между скоростями приводных механизмов 7, 8, то каретка 2 начинает двигаться в направлении к входному Е и выходному А участкам. Если укорачивается порожняя ветвь 1b вследствие соответствующей разницы между скоростями приводных механизмов 7, 8, то каретка 8 перемещается от входного Е и выходного А участков, увеличивая объем накопления.
Участок движения каретки 2 и, следовательно, переменный участок транспортировки F ограничиваются спиральным или винтовым участком W направляющих 13, 14, на котором они расположены точно равноудаленными и дугообразно с легким подъемом. Задаваемое этим нижнее конечное положение каретки 2 с минимальной длиной участка F транспортировки показано на фиг.2. Верхнее конечное положение каретки 2 при максимальной длине участка F транспортировки находится точно над нижним конечным положением. К верхнему конечному положению примыкают два горизонтальных, параллельных скрученных участка 42, 43 направляющих 13, 14, предназначенных для порожной ветви 1b, и рядом с ними, вертикальные обратные направляющие R, по которым роликовая цепь 12 направляется обратно в обычную, ограниченную поворотами 5 и 6 плоскость транспортировки и из нее наверх. Здесь также примыкают два других параллельных горизонтальных участка направляющих 13, 14, которые проходят до передней стороны овала OV и затем после поворотов под углом 90° заходят на входной Е или выходной А участок. На фиг.2 показаны только отдельные участки роликовой цепи 12 с захватами 9, в действительности же роликовая цепь 12 проходит по всему изображенному участку направляющих 13, 14 за исключением двух коротких отрезков между поворотами 3 и 4 каретки 2. Здесь располагаются опорные ролики 35 каретки 2.
Для большей наглядности на фиг.2 показана только одна спираль. На практике этот собственно накопительный участок образуют в виде многовитковой спирали с вертикальной и/или горизонтальной средней осью для соответствующего увеличения накопительной емкости. При этом соответственно удлиняются обратные направляющие R.
В нормальном режиме работы описанного выше устройства V1 двигатель ME работает синхронно с машиной 15 для выдувания бутылок, а двигатель МА - синхронно с этикетировочной машиной 17. Вместо этого возможно также соединить приводные механизмы 7, 8 посредством кинематической цепи с приводными двигателями машины 15 для выдувания бутылок или этикетировочной машины 17. При этом с входного участка Е вновь полученные выдуванием бутылки G подаются последовательно с соблюдением шага снабженной управляемыми захватными рычагами выпускной звездочкой 16 машины 15 для выдувания бутылок обычным образом в захваты 9 роликовой цепи 12 и надежно в них фиксируются. После этого транспортирующая ветвь 1а роликовой цепи 12 проходит в показанном стрелкой направлении последовательно через первую скрученную зону 36, более или менее длинный участок внутренней спирали W, первый поворот 3 каретки 2, более или менее длинный участок наружной спирали W, вторую скрученную зону 37 и достигает второго поворота 6 и выходного участка А. Здесь бутылки G последовательно отбираются из захватов 9 подающей звездочкой 18 этикетировочной машины 17, снабженной управляемыми захватами.
Миновав подающую звездочку 18, порожняя ветвь 1b роликовой цепи 12 проходит последовательно в указанном стрелкой направлении через второй приводной механизм 8, обратную направляющую R, скрученную зону 42, более или менее длинный наружный участок W, второй поворот 4 каретки 2, более или менее длинный участок внутренней спирали W, скрученную зону 43, обратную направляющую R, первый приводной механизм 7 и поступает снова к третьему повороту 5 и на входной участок Е.
Если оба приводных механизма 7, 8 работают с одинаковой скоростью, то описанное выше движение транспортирующего средства 1 происходит при нахождении каретки 2 в состоянии покоя. Если же этикетировочная машина 17 и, следовательно, второй приводной механизм 8 работает медленнее, чем первый приводной механизм 7, или если она простаивает, то транспортирующая ветвь 1а между входным участком Е и выходным участком А удлиняется; в одинаковой мере укорачивается порожняя ветвь lb, в результате чего каретка 2 перемещается из показанного на фиг.2 положения по часовой стрелке, и вследствие этого удлиняется участок F транспортировки, и увеличивается объем накопления. Такое движение каретки продолжается до тех пор, пока оба приводных механизма 7, 8 не начнут работать с одинаковой скоростью. Если приводной механизм 8 работает с большей скоростью, чем первый приводной механизм 7, то происходит обратный процесс и каретка 2 движется против часовой стрелки, вследствие чего участок F транспортировки и объем накопления уменьшаются.
Таким образом, без применения дополнительных приводов и мер по управлению кареткой 2, а лишь в зависимости от скорости работы приводных механизмов 7, 8, происходит автоматическое изменение длины участка F транспортировки. При этом благодаря своей постоянной фиксации захватами 9 бутылки G остаются в устойчивом положении на всем протяжении от входного участка Е до выходного участка А и могут перемещаться с большой скоростью также и на участке поворотов. Благодаря горизонтальному положению бутылок G на участке спиралей W достигается очень высокая плотность упаковки и, следовательно, высокая накопительная емкость при малой занимаемой площади. В случае необходимости бутылки G могут подаваться в соответствующие обрабатывающие машины, т.е. в моечную машину, в перевернутом состоянии, или же обработка, например охлаждение или очистка, проводится внутри устройства V1. Также возможно при этом проводить благодаря упругости захватов 9 отбраковку определенных бутылок G на определенных местах, например после обнаружения дефектов контрольным устройством или распределять бутылки G на выходном участке А между несколькими отводящими транспортерами. Кроме того, на звеньях 23 цепи могут быть установлены боковые опоры для бутылок G, и/или захваты могут быть выполнены за одно целое из упругой пластмассы.
Для транспортировки более тяжеловесных изделий, например, наполненных стеклянных бутылок, которые не предназначены для накопления в горизонтальном положении, скрученные зоны могут не применяться, в результате чего направляющие 13, 14 могут быть обращены на входном Е и выходном А участках своим отверстием в виде канавки вверх, как показано на фиг.7. В этом случае захваты 9 необходимо располагать на звене 23 цепи в положении, которое является развернутым на 90° по отношению к положению на фиг.3, а именно на достаточном удалении от направляющих роликов с тем, чтобы бутылки G могли беспрепятственно подаваться через каретку 2. Также в этом случае вместо захватов 9 на звеньях 23 цепи могут закрепляться в основном горизонтальные, проходимые по кривым несущие пластины 44, показанные на фиг.9 для другого примера выполнения. Эти несущие пластины образуют в основном сплошную транспортирующую поверхность для изделий, на которой они располагаются. При этом следует иметь в виду, что ход спирали W и подъем направляющих 40 суммируются. Для относительно устойчивых изделий, таких, например, как картонные коробки под напитки, это не создает трудности. При использовании менее устойчивых изделий, например, заполненных напитками бутылок, это является особо эффективным, как будет описано ниже в примере выполнения, показанном на фигурах 8-10, так как в этом случае несущие пластины 44 на участке каретки 2' не подвергаются дополнительному движению вверх.
Динамический накопитель V3, представленный на фигурах 8-10, содержит преимущественно одно бесконечное транспортирующее средство 1 в виде роликовой цепи 12' с проходимыми по кривым несущими пластинами, стационарные направляющие 13', 14' для роликовой цепи, состоящие из зеркально расположенных угловых профилей, каретки 2', перемещаемой по направляющим 13', 14' и содержащей первый поворот 3' под углом 180° и второй поворот 4' под углом 180° для роликовой цепи, входной участок Е с третьим поворотом 5' под углом 180° и первым приводным механизмом 7, а также выходной участок А с поворотом 6' под углом 180° и вторым приводным механизмом 8 для роликовой цепи 12'. Первый и второй повороты 3', 4' расположены практически горизонтально, а третий и четвертый повороты 5', 6' выполнены в основном вертикальными.
Схематически изображенный на фиг.8 участок F транспортировки вместе с транспортирующей ветвью 1а и порожней ветвью 1b ограничены поворотами 3'-6' и направляющими 13', 14', причем направляющие 13', 14' расположены параллельно между собой на входном Е и выходном А участках. Кроме того, спираль W содержит несколько витков для увеличения накопительной емкости; вследствие этого вертикальная обратная направляющая R выполнена удлиненной. В противном случае сохранится прежний эффект и действие, что и в динамическом накопителе V1 на фиг.2. Все устройство покоится на нескольких колоннах 46, из которых изображены только две. В противоположность динамическому накопителю V1 в динамическом накопителе V3 не предусмотрено наличия скрученных участков для транспортирующего средства 1'. Это означает, что несущие пластины 44 транспортирующей ветви 1а несмотря на ход спирали W расположены в основном полностью горизонтально, и поэтому вертикально установленные бутылки, картонные коробки и пр. могут транспортироваться бесперебойно с большой скоростью.
Как показано на фигурах 9 и 10, бесконечная роликовая цепь 12' содержит множество одинаковых звеньев 23', связанных подвижно между собой через сферические опоры 24'аналогично кардану. На каждом звене 23' цепи в целом расположено с возможностью вращения три направляющих ролика 10', 11', 25'. Два направляющих ролика 10', 11' с горизонтальной осью вращения находятся непосредственно на звене 23' цепи и перемещаются по двум горизонтальным полкам направляющих 13, 14.
Направляющий ролик 23' установлен на нижней стороне звена цепи с возможностью регулировки по высоте, закреплен вертикальным болтом 45 и поджимается вниз нажимной пружиной 47 в показанное на фиг.9, фиксируемое не показанными упорами нижнее конечное положение. На нижнем конце болта 45 расположен упорный подшипник 48 в виде шарика. Направляющий ролик 23' заходит между обеими вертикальными полками направляющих 13', 14', образующими своего рода направляющую канавку. Таким образом, каждое звено 23' цепи направляется точно по направляющим 13', 14' и для своего движения требует лишь незначительное усилие. Кроме того, на горизонтальной, слегка изогнутой вверх верхней полке каждого звена 23' цепи, несущей сферическую опору 24, закреплена соответственно горизонтальная несущая пластина 44 для размещения транспортируемых изделий. Несущие пластины 44 выполнены вогнуто-выпуклой формы и таким образом являются проходимыми по кривым в горизонтальном направлении.
Как изображено на фиг.10, каретка 2' содержит расположенную в основном горизонтально раму 49 и установлена с возможностью перемещения по обоим направляющим 13', 14' с помощью нескольких роликов 35' с вертикальной или горизонтальной осью вращения. Каретка содержит первый поворот 3' под углом 180° для транспортирующей ветви 1а роликовой цепи 12' и второй, противоположно расположенный поворот 4' под углом 180° для порожней ветви 1b роликовой цепи 12'. Для лучшей наглядности эта цепь показана на фиг.10 лишь частично. Повороты 3', 4' выполнены из двух закрепленных на раме 49 полукруглых направляющих дуг 38', 39' с U-образным, открытым сверху сечением. Направляющие дуги 38', 35' своими концевыми участками перекрывают направляющую канавку, образованную между двумя угловыми профилями каждой направляющей 13', 14'. Они переходят в скошенные направляющие 40', заведенные в направляющую канавку.
Этими направляющими 40', воздействующими на упорные подшипники 48, подвижные направляющие ролики 25' мягко извлекаются вверх из направляющей канавки направляющих 13', 14' или мягко опускаются в направляющую канавку. Между обеими направляющими 40' направляющей дуги скользят упорные подшипники 48 по всей поверхности дна соответствующей направляющей дуги 38', 39'. Такое вертикальное движение ограничено подвижными направляющими роликами 25', в то время как звенья 23' цепи и несущие пластины 44 постоянно остаются в плоскости транспортировки. Для обеспечения точного направления несущих пластин 44 и на участке поворотов 3', 4' концентрически по отношению к описанным выше направляющим дугам 38', 39' расположены дополнительные дугообразные направляющие элементы в виде двух параллельных прижимов 50, 51, воздействующих сверху на оба направляющих ролика 10', 11' каждого звена 23' цепи и надежно предупреждающих таким образом опрокидывание или подъем звеньев 23' цепи.
Благодаря описанному выше выполнению каретки 2' обеспечивается мягкое и плавное отсоединение транспортной ветви 1а и порожней ветви 1b роликовой ветви 12' на участке первого поворота 3' и второго поворота 4' от одной направляющей 13', 14' и соединение с другой направляющей 13', 14'. Эта функция выполняется одинаково при неподвижной и подвижной каретке 2'. Для улучшения направления на одной или обеих сторонах звеньев 23' цепи может быть расположен под направляющими роликами 10' или 11' дополнительный направляющий ролик 52, как это показано штрихпунктирной линией на фиг.9. Также можно расположить на роликовой цепи 12' вместо или дополнительно к несущим пластинам 44 захваты 9 для фиксации изделий G. Особенно в случае высокой производительности рекомендуется расположить на участке поворотов 3', 4' на каретке 2' по меньшей мере, с наружной стороны дуги направляющие элементы для изделий G в виде направляющего ограждения, лент, ограждений на роликах и пр. Направляющие элементы могут быть выполнены в случае необходимости приводными, при этом движение цепи завершается на участке каретки 2'. С внутренней стороны дуги могут размещаться на несущих пластинах 44 показанные штрихпунктирной линией направляющие рейки 53 для изделий G. Если спираль W вытянута в виде овала, то целесообразно выполнить каретку 2, 2' шарнирной, например с применением вертикального шарнира в середине опорной плиты 34 или рамы 49.
Еще более высокая проходимость каретки 2' по кривым достигается в том случае, когда, как это показано на фиг.11, каждый поворот 3', 4' расположен вместе со своей направляющей дугой 38', 39' и другими монтажными элементами с использованием шарнира 57, 58 на раме 49 с возможностью поворота и заходит своими опорными роликами 35' в направляющие 13', 14'. Соосно с шарнирами 57, 58 могут располагаться направляющие колеса 59, 60, которые охвачены роликовой цепью 12' и таким образом воспринимают производимые ею тяговые усилия. Направляющие дуги 38', 39' при этом разгружаются.
При использовании динамического накопителя, изображенного на фигурах 2-6, захваты 9 установлены на роликовой цепи 12 неподвижно. В противоположность этому захваты 9 в варианте выполнения на фиг.12 установлены на роликовой цепи 12 подвижно. Соответствующие два смежных захвата 9 объединены здесь в узел 61, который, в свою очередь, расположен с возможностью поворота на боковых консолях 62 роликовой цепи 12.
Не показанные пружины или аналогичные устройства прижимают узлы 61 к упорам 63 на консолях 62. В этой позиции соединительная линия проходит между двумя захватами 9 узла 61 в основном поперечно роликовой цепи 12, т.е. соединительная линия и роликовая цепь образуют прямой или тупой угол.
Посредством показанного штрихпунктирной линией стационарного кулачка управления 70 узлы 61 на участке поворотов 5, 6 входного участка Е и выходного участка А приводятся во вторую позицию, в которой соединительная линия проходит между двумя захватами 9 узла 61 в основном параллельно или по касательной к роликовой цепи 12. В этой позиции без затруднения изделия G могут последовательно вводиться раздельно в захваты 9 или извлекаться из них с помощью подающей звездочки 18 или выпускной звездочки 19. Это возможно посредством раздвижения узлов 61 благодаря зазору, образуемому консолью 62 с роликовой цепью 12. Напротив, на прямолинейных участках роликовой цепи захваты расположены вплотную друг к другу, в результате чего, по сравнению с транспортирующей цепью с неподвижными захватами, достигается существенно большая накопительная емкость при одинаковой длине роликовой цепи 12.
Роликовая цепь 12” на фиг.13 отличается от роликовой цепи 12' на фигурах 9 и 10 в основном тем, что подвижный ролик 25' выполнен не регулируемым по высоте, а шарнирно сочленен с возможностью поворота со звеном 23” цепи посредством качающегося рычага 26. В показанном нижнем конечном положении направляющего ролика 25', в котором он заходит в промежуток между не показанными направляющими 13', 14', он закреплен посредством соединения 64 с защелкой на звене 23” цепи с возможностью разъединения. Качающийся рычаг 26 жестко связан с управляющим пальцем 65. Этот палец отжимается вниз на участке поворотов 3', 4' каретки 2' кулачками управления аналогично прижимам 51, в результате чего направляющий ролик 25' поворачивается и выходит из направляющих 13', 14', а роликовая цепь 12” изменяет свое направление.
Непосредственно под несущей пластиной 44 на звене 23” располагается дополнительный направляющий ролик 71. Этот направляющий ролик обеспечивает направление роликовой цепи 12” на участке поворотов 3', 4' посредством либо направляющих дуг 39', либо поворотных колес 59, 60.
При таком конструктивном устройстве этот вариант выполнения обеспечивает особо мягкий переход роликовой цепи 12' на участке каретки 2' без регулировки несущей пластины 44 по высоте.
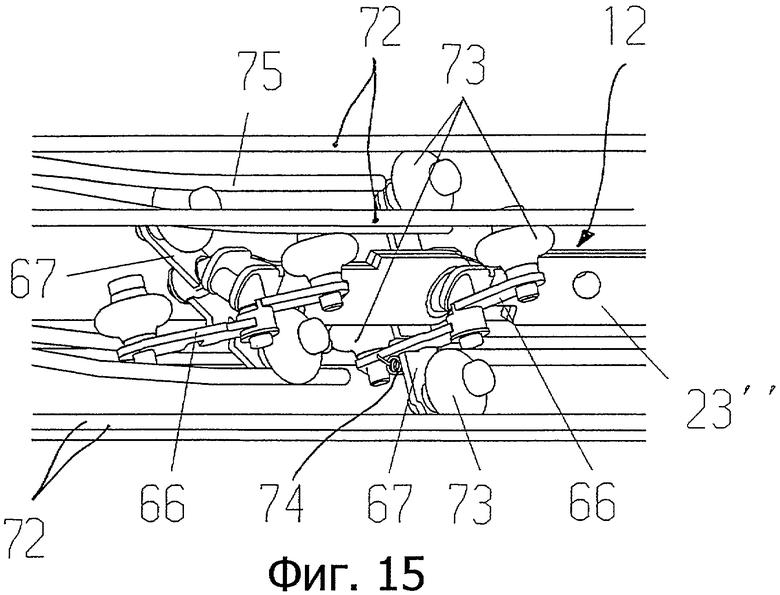
Динамический накопитель, представленный на фигурах 14 и 15, отличается от варианта его выполнения на фигурах 3 и 4 в числе прочего тем, что его направляющие 13, 14 состоят из шести параллельных круглых прутков 72. Кроме того, на каждом звене 23 цепи расположены два двойных рычага 66, 67 с возможностью совершать ножничное движение. На концах обоих двойных рычагов 66, 67 установлены с возможностью вращения в целом четыре профилированных направляющих ролика 73.
Спиральные пружины 74 поджимают двойные рычаги в положение разжима, показанное на фигурах 14, справа, и 15, в котором они располагаются в основном перпендикулярно круглым пруткам 72. В этом положении направляющие ролики 73 воздействуют на шесть круглых прутков 72, обеспечивая точное направление роликовой цепи 12.
Также и направляющие дуги 38,39 каретки 2 состоят из четырех параллельных круглых прутков 75. Эти прутки выполнены таким образом, что они заходят между круглыми прутками 72 направляющих 13, 14 и взаимодействуют с направляющими роликами 73 на конических участках. При достижении круглых прутков 75 направляющих дуг 38, 39 двойные рычаги 66, 67 сжимаются с преодолением усилия пружин 74 растяжения, в результате чего они устанавливаются косо по отношению к круглым пруткам 72. В этом разжатом положении они захватываются круглыми прутками 75 и перемещаются через направляющие дуги 38, 39 и повороты 3, 4 на другую направляющую 13 или 14. Здесь они освобождаются от круглых прутков 75, после этого двойные рычаги разжимаются, и круглые прутки 72 снова используются для осуществления направления.
На фигурах 16-22 представлен особо экономный и технически надежный вариант выполнения динамического накопителя. Этот накопитель отличается от накопителя на фигурах 14, 15 прежде всего тем, что в нем направляющие 13, 14 состоят из двух параллельных труб или круглых прутков 72, и что на каждом звене 23 цепи расположен с возможностью поворота только один двойной рычаг 66 с профилированными направляющими роликами 73.
На каждом конце каждого двойного рычага 66 установлены профилированные направляющие ролики 73 с возможностью независимого друг от друга вращения таким образом, что они содержат в себе или частично охватывают соответствующий круглый пруток 72.
Между каждым звеном 23 цепи и его двойным рычагом 66 размещена пружина 74 растяжения, которая стремится повернуть двойной рычаг 66. При этом она прижимает направляющие ролики 73 к круглым пруткам 72. На фиг.16 показано, что пружина 74 растяжения стремится повернуть двойной рычаг 66 в направлении против часовой стрелки.
Двойные рычаги 66 занимают слегка косое положение по отношению к звеньевой цепи 12 или круглым пруткам 72 и могут легко компенсировать незначительное изменение расстояния между круглыми прутками 72, закрепленными на распорках 76 сваркой или клеммовым соединением. Ось поворота между звеном 23 цепи и двойным рычагом 66 проходит либо строго по середине двойного рычага (фиг.17), либо при незначительном отклонении от нее (фиг.16). Расположение с отклонением от середины обеспечивает в некоторых случаях улучшенную стабилизацию двойных рычагов 66, в частности при повышенном тяговом усилии на участке поворотов.
Точное направление звеньевой цепи 12 на участке первого и второго поворотов 3, 4 каретки 2 достигается с помощью зубчатых поворотных колес 59, 60, аналогичных изображенным на фиг.11. На фиг.18 показано только одно поворотное колесо 59. Оба поворотных колеса 59, 60 содержат по периметру сверления 77, в которые заходят болты или головки 78, установленные на звеньях 23 цепи.
Непосредственно на каждом поворотном колесе 59, 60 или на жестко связанных с ним кольцах или дисках закреплены на участках между сверлениями 77 стойки 79 подшипника (на фиг.18 не показаны). В каждой стойке 79 подшипника установлен с возможностью вращения вал 80, ориентированный радиально к оси вращения поворотного колеса 59, 60. На внутреннем конце этого вала закреплен роликовый рычаг 81 с вращающимся контактным роликом 82. На наружном конце вала 80 закреплена двуплечая управляющая вилка 83, взаимодействующая с управляющими головками 84, расположенными с обеих сторон направляющих роликов 73 соосно с ними на двойных рычагах 66.
Управляющие вилки 83 выполнены таким образом, что они воздействуют на обе, расположенные друг над другом на одной стороне двойного рычага 66 управляющие головки 84 на участках, обращенных в направлении движения и встречно направлению движения роликовой цепи 12. Таким образом достигается точный поворот или фиксация двойных рычагов 66 на участке поворотов 3, 4.
Контактные ролики 82 заходят в два управляющих кулачка 85 с канавкой, закрепленные на каретке 2 или 2'. Управляющие кулачки 85 выполнены таким образом, чтобы управляющие вилки 83 на подающем и выпускном участках между поворотными колесами 59, 60 и роликовой цепью 12 соответствовали косому положению двойных рычагов 66, в котором они входят в зацепление с круглыми прутками 72. Таким образом обеспечивается спокойное начало и завершение движения роликовой цепи 12. Однако на промежуточном участке управляющие вилки 83 принимают более косое положение, вследствие чего двойные рычаги 66 выходят из зацепления с круглыми прутками 72 на подающем участке, положение слева на фиг.16, и входят в зацепление с ними на выпускном участке.
Дополнительно направление движения роликовой цепи 12 по круглым пруткам 72 может быть улучшено за счет цилиндрических опорных роликов 86, установленных неподвижно на звеньях 23 цепи. Опорные ролики 86 могут воспринимать на себя вес звеньевой цепи 12, захватов 9 и бутылок G. Благодаря своей цилиндрической боковой поверхности они не препятствуют круглым пруткам 72 и направляющим роликам 73 входить между собой в зацепление или выходить из него.
Также возможно фиксировать двойные рычаги 66 по отношению к звеньям 23 цепи с возможностью разъединения с помощью соединения 64 с защелкой, аналогичного показанному на фиг.13. Вместо этого также возможно установить на звеньях 23 цепи подпружиненные управляющие пальцы 87, которые посредством не показанных, закрепленных на каретке 2, 2' криволинейных направляющих приводятся в зацепление с двойными рычагами 66 или выводятся из него.
Динамический накопитель на фиг.22 отличается от накопителя на фигурах 16-21 прежде всего тем, что в нем расцепление поворотных направляющих роликов 73 достигается с помощью закрепленных на каретке 2 направляющих, аналогичных изображенным на фиг.7. Эти косо установленные направляющие 41 приподнимают наезжающие нижние направляющие ролики 73, в результате чего двойные рычаги 66 поворачиваются, и ролики 73 выходят из зацепления с круглыми прутками 72. В таком положении двойные рычаги 66 фиксируются опорной плитой каретки 2, по которой перемещаются ролики 73. При обратной последовательности на выпускном участке поворотов 3, 4 происходит опускание нижних направляющих роликов 73 под действием соответствующих направляющих 41. Уложенные на ролики 89 ремни 88 воспринимают создаваемое роликовой цепью 12 тяговое усилие, в результате чего отпадает необходимость в использовании поворотных колес.
Динамический накопитель на фиг.23 отличается от варианта выполнения на фиг.2 прежде всего тем, что в нем средняя ось спиралей W параллельных направляющих 13, 14 расположена горизонтально, вследствие чего спирали W располагаются как бы вертикально. Благодаря этому достигается компоновка, которая требует очень мало места. Кроме того, на выпускном участке А к транспортирующей ветви 1а гибкого транспортирующего средства 1 подключены три одинаковые выпускные звездочки 18, которые захватывают каждую третью бутылку G. В результате становится возможным распределение бутылок G по трем и более дорожкам.
Для динамического накопителя на фиг.23 не предусмотрено применения отдельных приводных механизмов 7, 8. Вместо них приводные двигатели MA, ME непосредственно воздействуют на зубчатые поворотные колеса 90, 91 на входном Е и выходном А участках.
Примеры выполнения изобретения на фигурах 24-28 частично основаны на примере выполнения на фигурах 16, 17 и 18. И здесь наружная направляющая 13 и внутренняя направляющая 14 состоят соответственно из двух параллельных круглых прутков 72 с распорками 76, закрепленных в станине с колоннами 46. Здесь также каждое звено 23 цепи содержит две пары профилированных направляющих роликов 73, перемещающихся по круглым пруткам 72, причем расположенные с наружной стороны дуги направляющие ролики 73 установлены на двойном рычаге 66, который, в свою очередь, расположен с возможностью поворота на звене 23 цепи. Расположенные с внутренней стороны дуги направляющие ролики 73 установлены непосредственно на звене 23 цепи и поэтому не являются поворотными. Эти направляющие ролики 73 обеспечивают направление движения роликовой цепи 12 на участке обоих поворотов 3 и 4 каретки 2 (см. фиг.28).
В примерах выполнения на фигурах 24-28 на каждом звене 23 цепи установлена с возможностью поворота стопорная защелка 93, предварительно напряженная торсионной пружиной 93. Ось поворота стопорной защелки 92 проходит параллельно оси поворота двойного рычага 66; торсионная пружина 93, показанная на фиг.24, действует по часовой стрелке. Стопорная защелка 93 взаимодействует с поперечным штифтом 94, закрепленным параллельно оси вращения на двойном рычаге 66 и выступающим с обеих сторон. Если поперечный штифт 94 находится в зацеплении со стопорной защелкой 92, то двойной рычаг 66 вместе с действующим в качестве упора звеном 23 цепи заблокирован от поворота, и его оба направляющих ролика 74 находятся в зацеплении с круглыми прутками 72. Эта позиция, в которой двойной рычаг располагается в основном перпендикулярно круглым пруткам, нарушается только при прохождении первого 3 и второго 4 поворотов на участке каретки 2.
С этой целью на стопорной защелке 92 предусмотрен управляющий палец 95, взаимодействующий с направляющей 41 каретки 2. При попадании управляющего пальца 95 на эту направляющую 41 стопорная защелка 92 поворачивается, преодолевая усилие торсионной пружины 93 (на фиг.24 против часовой стрелки), входит в зацепление с поперечным штифтом 94 и освобождает двойной рычаг 66. Теперь его положение определяется на участке каретки 2 закрепленным на ней, дугообразным кулачком 96. При этом двойной рычаг 66 непосредственно перед достижением поворота 3 или 4 поворачивается настолько, чтобы его оба направляющих ролика 74 могли пройти между круглыми прутками 72 (позиция X на фиг.28). И наоборот, после прохождения поворотов 3, 4 двойной рычаг 66, после того как он прошел между обоими круглыми прутками 72, поворачивается и занимает свое обычное положение, в котором его оба направляющих ролика 74 снова воздействуют «снаружи» на круглые прутки 72, после чего стопорная защелка 93 автоматически срабатывает на поперечном штифте 94.
В примерах выполнения на фигурах 17 и 24-27 на каждом выполненном из листового металла и/или пластмассы звене 23 цепи расположена косо отстоящая опора S. В примере выполнения на фиг.17 на каждой опоре S расположен захват 9, соответствующий изображенному на фиг.4 и содержащий два поворотных рычага 28, 29 и пружину 30, нагружающую их при закрытии или захвате. В примере выполнения на фигурах 24 и 25 на каждой опоре S расположена несущая пластина, соответствующая изображенной на фиг.9, на которой, кроме того, выполнен буртик 97 для взаимного упора. В примере выполнения на фиг.26 на каждой опоре S расположен захват 9, захватные рычаги 28, 29 которого выполнено за одно целое из упругой пластмассы. В примере выполнения на фиг.27 на каждой консоли S расположен захват 9, захватные рычаги 28, 29 которого выполнены для транспортировки в подвешенном состоянии преимущественно заполненных бутылок G. Захватные рычаги 28, 29 охватывают горлышко бутылки ниже несущего кольца Т почти полностью, обеспечивая, таким образом, устойчивое положение бутылок G. Захватные рычаги снабжены по ту сторону своей оси поворота ответными рычагами 98, с помощью которых они могут принудительно открываться посредством стационарных управляющих кулачков 99 на входном Е и выходном А участках, преодолевая усилие пружины 30.
Благодаря захватам 9, показанным на фигурах 4, 17, 26 и 27 и охватывающим горлышко бутылок, по меньшей мере частично, бутылки G фиксируются и центрируются с геометрическим и силовым замыканием. Таким образом бутылки G точно сохраняют свое положение по отношению к роликовой цепи 12 во время прохождения внутри динамического накопителя.
Каретка 2 на фиг.28, как и каретка 2 на фиг.22, является подвижной и направляется с помощью нескольких опорных роликов 35 в целом по четырем круглым пруткам 72 наружной направляющей 13 и внутренней направляющей 14. Она содержит помимо уже описанной направляющей 41 для управления стопорной защелкой 92 и управляющего кулачка 96 для управления двойными рычагами 66 две образующие первый и второй повороты 3, 4 направляющие дуги 100, взаимодействующие с расположенными непосредственно на звеньях 23 цепи направляющими роликами 73 и изменяющими при этом направление движения роликовой цепи 12 исключительно за счет трения качения. Направляющие дуги 100 воздействуют на обращенные друг к другу стороны направляющих роликов 73, в то время как обращенные друг от друга стороны направляющих роликов 73 взаимодействуют с круглыми прутками 72. Таким образом, становится возможным напускной и плавный переход направляющих роликов 73 с круглых прутков 72 на направляющие дуги 100 и наоборот.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для группирования и установки бутылок в стандартные ящики с перегородками | 1957 |
|
SU112199A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА БАРАНОЧНЫХ ИЗДЕЛИЙ | 1965 |
|
SU214451A1 |
| Устройство для выгрузки бутылок из тары | 1983 |
|
SU1121188A1 |
| Машина для укладки бутылок в ящики | 1954 |
|
SU100092A1 |
| Устройство для выгрузки бутылок из контейнера | 1981 |
|
SU1000351A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ БУТЫЛОК ИЛИ ПОДОБНЫХ СОСУДОВ | 2007 |
|
RU2414698C2 |
| Машина для укладки бутылок в ящики | 1955 |
|
SU102961A2 |
| ТРАНСПОРТЕР, ИМЕЮЩИЙ ПАРАЛЛЕЛЬНЫЕ И ПЕРЕСТАВЛЯЕМЫЕ ПО ВЫСОТЕ ТРАНСПОРТИРОВОЧНЫЕ УСТРОЙСТВА | 2016 |
|
RU2714699C2 |
| ГАЗЕТНЫЙ ТРАНСПОРТЕР КАСКАДНОЙ ПОДАЧИ | 1971 |
|
SU309493A1 |
| ГОРИЗОНТАЛЬНЫЙ ЛЕНТОНАКОПИТЕЛЬ | 1996 |
|
RU2182857C2 |















Устройство содержит бесконечное гибкое транспортирующее средство (1), разделенное на переменные транспортирующую (1а) и порожнюю (1b) ветви. Транспортирующая и порожняя ветви содержат встречно подвижные участки переменной длины, перемещающуюся в плоскости транспортировки каретку (2) для изменения накопительной способности, содержащую первый поворот (3) для транспортирующей ветви и второй поворот (4) для порожней ветви, первый приводной механизм (7) для транспортирующего средства на входном участке и второй приводной механизм (8) для транспортирующего средства на выходном участке. Первый и второй приводные механизмы приводятся в действие независимо друг от друга с разной скоростью транспортировки. Транспортирующее средство содержит звеньевую цепь (12) с вращающимися направляющими роликами, которая перемещается по одной стационарной направляющей. Направляющие ролики шарнирно соединяются с соответствующими звеньями цепи посредством качающихся рычагов. Обеспечивается бесперебойная транспортировка изделий с большой скоростью. 2 н. и 17 з.п. ф-лы, 28 ил.
1. Устройство (V) для динамического накопления изделий (G) вдоль участка (F) транспортировки между входным (Е) и выходным (А) участками, содержащее бесконечное гибкое транспортирующее средство (1), разделенное на переменные транспортирующую (1а) и порожнюю (1b) ветви, причем транспортирующая и порожняя ветви содержат встречно подвижные участки переменной длины, по меньшей мере одну перемещающуюся в плоскости транспортировки каретку (2) для изменения накопительной способности, содержащую первый поворот (3) для транспортирующей ветви и второй поворот (4) для порожней ветви, первый приводной механизм (7) для транспортирующего средства (1) на входном участке и второй приводной механизм (8) для транспортирующего средства на выходном участке, причем первый и второй приводные механизмы приводятся в действие независимо друг от друга с разной скоростью транспортировки, отличающееся тем, что транспортирующее средство (1) содержит звеньевую цепь (12) с вращающимися направляющими роликами (10, 11, 25, 73), которая по меньшей мере на отдельных участках перемещается по меньшей мере по одной стационарной направляющей (13, 14), причем по меньшей мере один направляющий ролик (25, 73) подвижно установлен на соответствующем звене (23) цепи и шарнирно сочленен с соответствующим звеном (23) цепи посредством качающегося рычага (26, 66).
2. Устройство по п.1, отличающееся тем, что на подвижный направляющий ролик (25, 73) воздействует пружинящий элемент (27), поддерживающий направляющий ролик (25, 73) в зацеплении со стационарной направляющей (13, 14).
3. Устройство по п.1, отличающееся тем, что качающийся рычаг (26, 66) в позиции, в которой подвижный направляющий ролик (25, 73) находится в зацеплении со стационарной направляющей (13, 14), закреплен с возможностью отсоединения на соответствующем звене (23) цепи преимущественно с помощью соединения (64) с защелкой или стопорной защелки (92).
4. Устройство по п.3, отличающееся тем, что качающийся рычаг (26, 66) выполнен реверсивным с помощью управляющего устройства (65, 99) на участке между позицией, в которой направляющий ролик (25, 73) воздействует на стационарную направляющую (13, 14), и позицией после поворота в ее сторону.
5. Устройство по п.1, отличающееся тем, что подвижный направляющий ролик (25) установлен с помощью по меньшей мере одного болта (45) параллельно оси вращения на звене (23) цепи с возможностью смещения.
6. Устройство по п.1, отличающееся тем, что подвижный направляющий ролик (25) связан с упорным подшипником (48), нагруженным кареткой (2).
7. Устройство по п.1, отличающееся тем, что на соответствующем звене (23) цепи расположены с возможностью ножничного поворота по меньшей мере два двойных рычага (66, 67), на обоих концах которых установлены направляющие ролики (25'').
8. Устройство по одному из пп.1-7, отличающееся тем, что каретка (2) содержит две встречно изогнутые направляющие дуги (38, 39, 100) для звеньевой цепи (12), концевые участки которой соответствуют направляющим (13, 14, 72) и при необходимости приводят роликовую цепь (12) в зацепление с направляющими (13, 14, 72) или выводят из зацепления с ними.
9. Устройство по п.8, отличающееся тем, что направляющие дуги содержат на своих концевых участках скошенные направляющие (40) и/или клинья (41), взаимодействующие с направляющими роликами (10, 11, 25, 73), и/или упорными подшипниками (48), и/или стопорными защелками (92).
10. Устройство по п.8, отличающееся тем, что оба поворота (3, 4) и/или направляющие дуги (38, 39) расположены с возможностью поворота на совместной раме (49) и снабжены опорными роликами (35), воздействующими на направляющие (13, 14).
11. Устройство по п.1, отличающееся тем, что на порожнюю ветвь (1b) гибкого транспортирующего средства (1) воздействует по меньшей мере один предварительно упруго напряженный зажимный элемент (68, 69).
12. Устройство по п.1, отличающееся тем, что направляющие (13, 14) для роликовой цепи (12) содержат два параллельных круглых прутка (72).
13. Звеньевая цепь, снабженная вращающимися направляющими роликами, предназначенная, в частности, для устройства динамического накопления изделий по п.1, отличающаяся тем, что по меньшей мере один направляющий ролик (25, 73) подвижно установлен на соответствующем звене (23) цепи, при этом подвижный направляющий ролик (25, 74) шарнирно сочленен с соответствующим звеном (23) цепи посредством качающегося рычага (26, 66).
14. Звеньевая цепь по п.13, отличающаяся тем, что подвижный направляющий ролик (25, 73) нагружен пружинящим элементом (27, 74).
15. Звеньевая цепь по п.13, отличающаяся тем, что качающийся рычаг (26, 66) в позиции, в которой подвижный направляющий ролик (25, 73) находится в зацеплении со стационарной направляющей (13, 14), закреплен на соответствующем звене (23) цепи с возможностью отсоединения.
16. Звеньевая цепь по п.13 или 14, отличающаяся тем, что подвижный направляющий ролик (25) установлен с помощью по меньшей мере одного болта (45) параллельно оси вращения на звене (23) цепи с возможностью смещения.
17. Звеньевая цепь по п.13 или 14, отличающаяся тем, что подвижный направляющий ролик (25) связан с упорным подшипником (48).
18. Звеньевая цепь по п.13, отличающаяся тем, что на соответствующем звене (23) цепи расположен с возможностью поворота по меньшей мере один двойной рычаг (66, 67), на обоих концах которого установлены направляющие ролики (25, 73).
19. Звеньевая цепь по п.13 или 18, отличающаяся тем, что качающийся рычаг (26) или двойной рычаг (66) закреплен на соответствующем звене (23) цепи с помощью соединения (64) с защелкой или стопорной защелки (92) с возможностью отсоединения.
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ЦЕПНЫМ ПРИВОДОМ (ВАРИАНТЫ) | 1996 |
|
RU2160694C2 |
| НАКОПИТЕЛЬ ПЕРЕМЕННОЙ ЕМКОСТИ ДЛЯ ПРЕДМЕТОВ СТЕРЖНЕОБРАЗНОЙ ФОРМЫ | 1999 |
|
RU2212834C2 |
| US 2002195317 A1, 26.12.2002 | |||
| Способ получения сополимеров этилена с винилхлоридом | 1976 |
|
SU618381A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ МОДУЛЯТОРА СВЯЗЫВАНИЯ МЕЖДУ ПОЛИПЕПТИДОМ α И VCAM-1 (ВАРИАНТЫ) | 1998 |
|
RU2215006C2 |
| Амортизатор | 1980 |
|
SU1011930A1 |
| Одноканальное устройство для управления многофазным тиристорным регулятором напряжения | 1981 |
|
SU1053257A1 |

