541 СИСТЕМА УПРАВЛЕНИЯ ГРУЗОИЖИ ОПЕРАЦИЯМИ Изобретение относится к автоматизации специальных грузовых систем на танкере. По основному авт.св. W 596498 известна система управления грузовыми операциями на танкере, содержащая датчики уровня и датчики режимов работы насосов, связанные через устройство ввода и вывода информации с формирователем состояния объектов, датчики посадки танкера, связанные с формирователем критических параметров , к одним из выводов которого подключены блоки контроля посадки и прочности, сигнальные табло, исполнительные механиз насосов, блок коммутации управляющих команд и блок опроса, состоящий из регистров параметров по приоритету, матричных ячеек управления ими и матрич ных ячеек формирования управляющих команд .при этом входы блока опро са соединены с одним из выходов формирователей состояния объекта и критических параметров, а входы - соответственно с одним КЗ выходов блок коммутздии управляющих команд, други входы которого соединены соответ- , ственно с выходами устройства ввода НА ТАНКЕРЕ 1 вывода информации и формирователя состояния объекта, а выходы - соответственно с исполнительными механизмами насосов и затворов и сигнальными табло. Матричные ячейки управления регистрами параметров по приоритету выполнены на элементс1Х И, ИЛИ Задержка и И-НЕ, а блок коммутации управляющих команд состоит из переключателя и логических элементов И, НЕ и Задержка 1. Недостатком известной системы является то, что она не позволяет оператору пос.пе получения плана грузовых программ проверить будущий процесс проведения грузовых операций до начала приема груза с тем, чтобы определить правильность заложенных конечных значений параметров процесса грузовых операций и возможность выбега критического параметра и время его появления,что позволит к ним подготовиться или с помощью перераспределений приема груза во времени (корректировки генергшьной линии грузовых операций)исключить заранее возможнсэсть появления этих критических ситуаций.
Цель дополнительного изобретениярасширение функциональных возможностей системы.
Цель достигается тем,что системсс снабжена блоком имитации грузовых программ, состоящим из временного задатчика, подключенного к нему одним своим входом имитатора датчиков, другой вход которого соединен с одним из выходов переключателя блока коммутации управляющих команд и элемента И, один и другой входы которого пс дключены соответственно к одному из входов и одному из выходов имитатора датчиков, а выход - к формирователю состояния объектов, другой выхЬд имитатора датчиков подключен к одному из входов формирователя критических параметров, при этом блок коммутации управляющих команд снабжен логическими элементами ИЛИ, чере которые его другие Выходы подключены соответственно к сигнальному табло и из входов одного из элементов И.
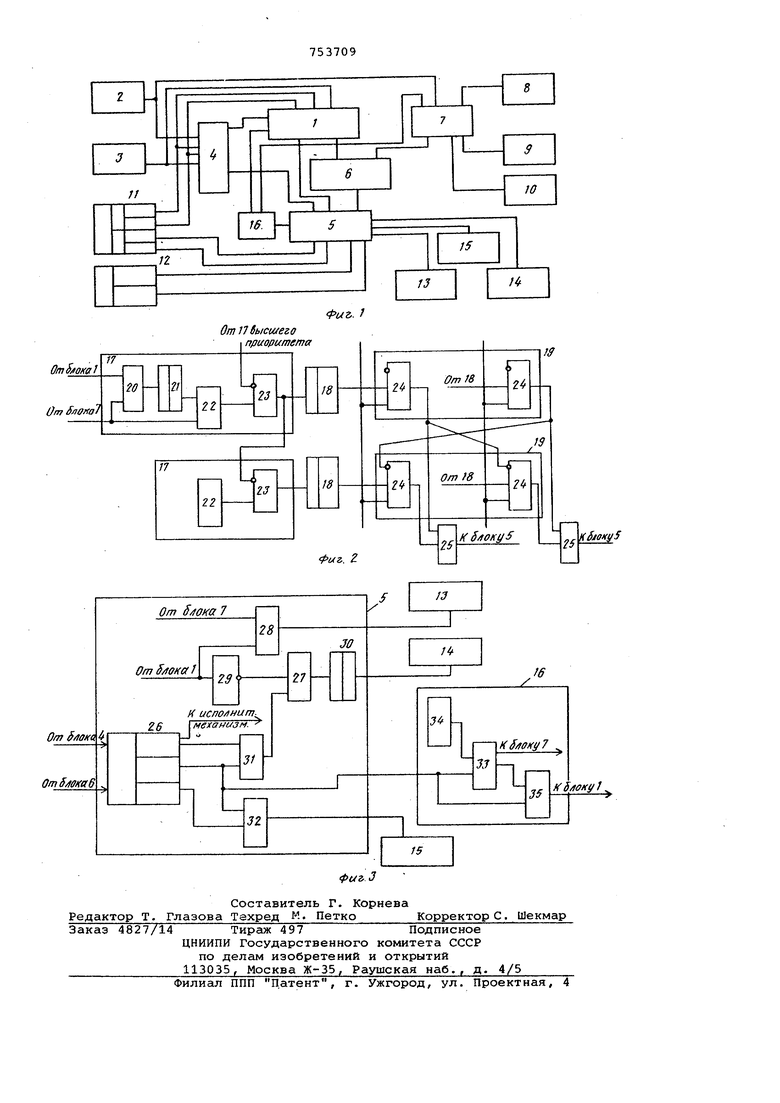
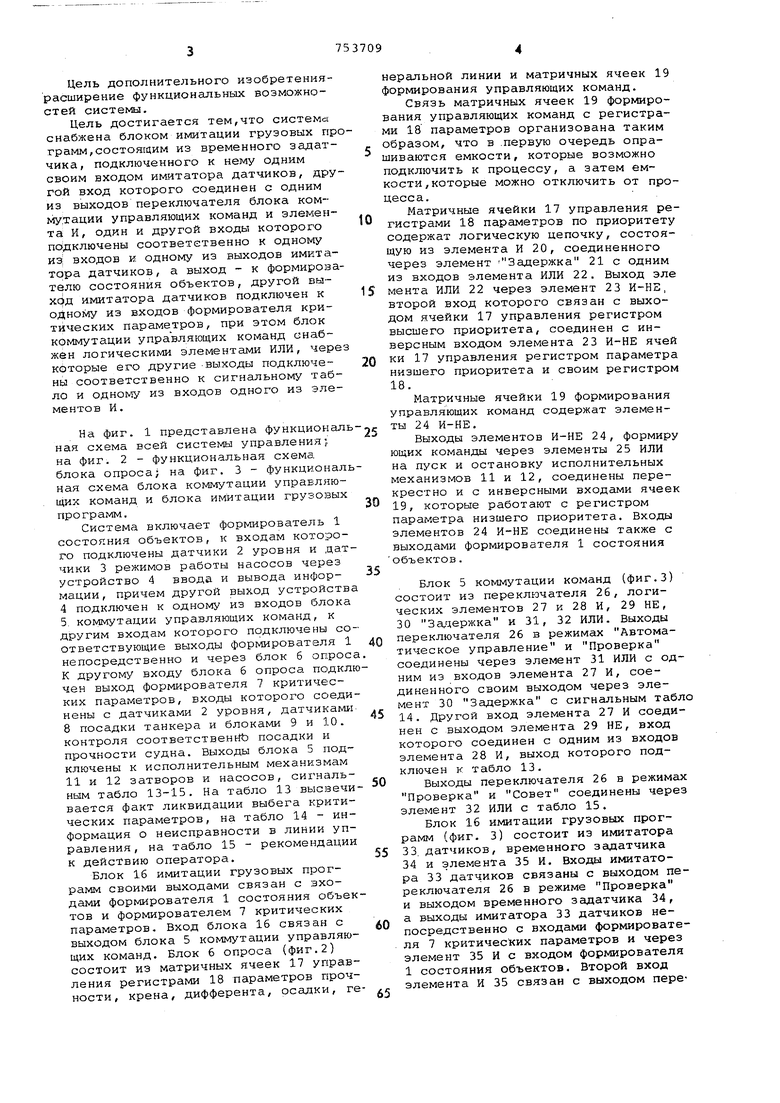
На фиг. 1 представлена функционалная схема всей системьа управления;, на фиг. 2 - функциональная схема блока опроса; на фиг. 3 - функционалная схема блока коммутации управляющих команд и блока имитации грузовых программ.
Система включает формирователь 1 состояния объектов, к входам которого подключены датчики 2 уровня и датчики 3 режимов работы насосов через устройство 4 ввода и вывода информации, причем другой выход устройств 4 подключен к одному из входов блока 5. коммутации управляющих команд, к другим входам которого подключены соответствующие выходы формирователя 1 непосредственно и через блок б опрос К другому входу блока 6 опроса подклчен выход формирователя 7 критических параметров, входы которого соединены с датчиками 2 уровня, датчиками 8 посадки танкера и блоками 9 и 10. контроля соответственйЬ посадки и прочности судна. Выходы блока 5 подключены к исполнительным механизмам 11 и 12 затворов и насосов, сигнальным табло 13-15. На табло 13 высвечивается факт ликвидации выбега критических параметров, на табло 14 информация о неисправности в линии управления , на табло 15 - рекомендации к действию оператора.
Блок 16 имитации грузовых программ своими выходами связан с входами формирователя 1 состояния объектов и формирователем 7 критических параметров. Вход блока 16 связан с выходом блока 5 коммутации управляющих команд. Блок 6 опроса (фиг.2) состоит из матричных ячеек 17 управления регистрами 18 параметров прочности, крена, дифферента, осадки, генеральной линии и матричных ячеек 19 формирования управляющих команд.
Связь матричных ячеек 19 формирования управляющих команд с регистрами 18 параметров организована таким образом, что в .первую очередь опрашиваются емкости, которые возможно подключить к процессу, а затем емкости, которые можно отключить от процесса.
Матричные ячейки 17 управления регистрами 18 параметров по приоритету содержат логическую цепочку, состоящую из элемента И 20, соединенного через элемент Задержка 21 с одним из входов элемента ИЛИ 22. Выход эле мента ИЛИ 22 через элемент 23 И-НЕ, второй вход которого связан с выходом ячейки 17 управления регистром высшего приоритета, соединен с инверсным входом элемента 23 И-НЕ ячей ки 17 управления регистром параметра низшего приоритета и своим регистром 18.
Матричные ячейки 19 формирования управляющих команд содержат элементы 24 И-НЕ.
Выходы элементов И-НЕ 24, формиру ющих команды через элементы 25 ИЛИ на пуск и остановку исполнительных механизмов 11 и 12, соединены перекрестно и с инверсными входами ячеек 19, которые работают с регистром параметра низшего приоритета. Входы элементов 24 И-НЕ соединены также с выходами формирователя 1 состояния объектов.
Блок 5 коммутации команд (фиг.З) состоит из переключателя 26, логических элементов 27 и 28 И, 29 НЕ, 30 За чержка и 31, 32 ИЛИ. Выходы переключателя 26 в режимах Автоматическое управление и Проверка соединены через элемент 31 ИЛИ с одним из входов элемента 27 И, соединенного своим выходом через элемент 30 Зсщержка с сигнальным табл 14. Другой вход элемента 27 И соединен с выходом элемента 29 НЕ, вход которого соединен с одним из входов элемента 28 И, выход которого подключен к табло 13.
Выходы переключателя 26 в режимах Проверка и Совет соединены через элемент 32 ИЛИ с табло 15.
Блок 16 имитации грузовых программ (фиг. 3) состоит из имитатора 33. датчиков, временного задатчика 34 и элемента 35 И. Входы имитатора 33 датчиков связаны с выходом переключателя 26 в режиме Проверка и выходом временного задатчика 34, а выходы имитатора 33 датчиков непосредственно с входами формирователя 7 критических параметров и через элемент 35 И с входом формирователя 1 состояния объектов. Второй вход элемента И 35 связан с выходом переключателя 26 в режиме Проверка. Система работает следующим образом. С устройства 4 для каждого конкретного случая погрузки-выгрузки в формирователь 1 состояния объектов вводятся конечные значения процесса грузовых операций по уровням. По посадке танкера вводятся конечные значения в формирователь 7 критических параметров. После введения плана грузовых программ и в .зависимости от намеченной скорости проведения грузовых операций, оператор на блоке 16 устанавливает режим работы имитатора 33 каждого датчика при помощи временного задатчика 34, т.е. устанавливается время заполнения или осушения каждой емкости. Переключатель 26 устанавливается в положение Проверка и система включается. Начинается процесс проверки введенного плана проведения грузовых операций. В соответствии с конечньами и текущими параметрами регист
18параметров генеральной линии осуществляет выбор необходимой матричной ячейки 19.
Выходные сигналы с матричных ячеек
19через элементы ИЛИ, 25 поступают на блок 5 коммутации управляющих команд, где через переключатель 26 поступают на вход имитатора 33 и на вход элемента 35 И. Управляющие команды, таКИМ образом, в режиме Проверка включают и выключают имитатор 33 датчика емкостей, на входе которых установлен объекты 11 управления. После включения имитатора 33 на его выходе появляется два сигнала. Первый идет на второй вход элемента 35 И, с выхода которого сигнал поступает на вход формирователя 1 состояния объекта для получения информации о выполнении управляющей командой своей функции.
Второй сигнал с имитатора 33 поступает непосредственно на вход формирователя 7 критических параметров для выработки информации о ходе протекания процесса Проверка.Обработанные в формирователях 1 и 7 сигналы поступают на блок 6 опроса для формирования последующих управляющих команд намеченной генеральной линии проведения грузовых операций.
Если текущее значение какого-либо параметра,например,прочности превзойдет допустимое значение,, информация с формирователя 7 критических параметров поступает на соответствующее табло блока 10 контроля прочности, а также на входеа матричных ячеек 17 управления регистрами 18 параметров по приоритету блока 6 опроса.
В матричной ячейке 17 управление регистром 18 параметра критический параметр поступает на вход элемента 22 ИЛИ и через элемент 23 И-НЕ-одноиременно на запрещающий вход элемента 23 И-НЕ матричной ячейки 17 параметра низшего приоритета и на включение своего регистра 18 параметра.
Регистр 18 параметра осуществляет подключение той матричной ячейки 19 формирования управляющих команд, на которую не поступают запрещающие сигналы от матричной ячейки 17, подключенной к регистру параметров 18 высшего приоритета, и имеются разрешающие сигналы формирователя 1 состоя;ния объектов Можно подключать или Можно отключать.
В случае формирования управляющей команды для ликвидации выбега критического параметра путем отключения емкости от процесса грузовых операций , после выдержки времени на элементе 21 сигналы о наличии выбега критического параметра с блока 7 и отключении емкости с блока 1 формирования состояния объектов через элемент 20 И, поступает на вход элемента 22 ИЛИ для выбора следующей рекомендации.
Сформированный в матричной ячейке 19 управляющий сигнал идет одновременно на вход блока 5 коммутации управляющих команд через элементы 25 ИЛИ, и перекрестно на запрещающие входы элементов 24 И-НЕ матричных ячеек 19 формирования управляющих команд, подключенных к регистрам 18 параметров низшего приоритета
В блоке 5 коммутации управляющих команд сигнал через переключатель 26 идет одновременно на табло 15 Рекомендация к действию и на подключение выбранного имитатора, 33 сигнал поступает на формирователь 7 критических параметров и одновременно через элемент 35 И на вход формирователя 1 состояния объектов.
Обработанный в формирователе 1 .сигнал поступает на вход элемента 28 И для включения табло 13 Ликвидация выбега критического параметра
В случае выхода за допустимые пре делы одновременно нескольких параметров, выбор рекомендаций по параметрам низшего приоритета производится после выбора рекомендации по параметру высшего приоритета.
Таким образом, оператор одновременно получают информацию о выбеге критического параметра, о пути его устранения и о том, что начался процесс ликвидации выбега критического параметра. В зависимости от величины и длительности выбега критического параметра оператор принимает решениепроизводить ему корректировку введенного плана проведения грузовых операций или нет. Если значение выбега параметра большое и его ликвидация проводилась длительное время, то необходимо произвести корректировку плана грузовых операций. В этом илучае останавливается режим Проверка вводится с устройства 4 соответствующая корректировка в план грузовых операций, и система включается занов в режим Проверка. Если при повторной проверке никакого выбега парамет ра не произошло,то введенный в систе план проведения грузовых операций принимается к реализации. Переключатель 26 выбора режима пе реводится в режим Автоматическое уп равление или Совет. Выходные сигналы датчиков 2 уровня , датчиков 3 режимов работы насосов и исполнительных механизмов 11 затворов начинают поступать на (формирователь 1 состояния объектов, а сигналы датчиков 8 посадки танкера на формирователь 7 критических параметров для выработки информации о коде протекания процесса. На устройство 44 вода и вывода информации эти сигналы поступают для дистанционного контроля.Сигналы от датчиков 2 уровня поступают на вход формирователя 7 критических параметров по прочности. В зависимости от заданных конечных значений параметров процесса грузовых операций и начального состояния исполнительных механизмов 11 и- 12, обработанные в формирователи 1 состояния объектов, сигналы поступают в блок б опроса, где начинается процесс выработки управляющих команд, аналогичный режиму Проверка. Сформированные управлягацие команд с блока б опроса поступают на блок 5 коммутации управляющих команд. Через переключатель 26 в режиме Автоматическое управление они поступают на исполнительные механизмы 11 и 12. В случае работы системы в режиме Сове чика сформированные управляющие команды поступают через элемент ИЛИ 32 на табло 15 Рекомендация к деиствию . В случае неисправ1 ости в линиях контроля и управления загорается таб ло 14 путем включения логической цепочки, состоящей из -элементов 30 Задержка, 27 И, 29 НЕ и 31 ИЛИ. Из-за влияния на процесс проведения грузовых операций внешних возмущанщих воздействий нельзя полностью исключить факт возможного выбега какого-либо параметра процесса за допустимое значение. Таким образом, в случае появления выбега какого-либо параметра за допустимое значение во времени проведения грузовых операций, информация с формирователя 7 критических параметров поступит на соответствующее табло блока 10 контроля прочности или контроля посадки 9, а также на входы матричных ячеек 17 управления регистрами 18 параметров .по приоритету блока б опроса для выработки управляющей команды с целью ликвидации выбега критического параметра. Формула изобретения Система управления грузовыми операциями на танкере, по авт.свид. № 596498, отличающаяся тем, что, с целью расширения функциональных возможностей, она снабжена блоком имитации грузовых программ, состоящим из временного задатчика, подключенного к нему одним своим входом имитатора датчиков, другой вход которого соединен с одним из выходов переключателя блока коммутации управляющих команд и элемента И, один и другой входы которого подключены соответственно к одному из входов и одному из выходов имитатора датчиков, а выход -- к формирователю состояния объектов, другой выход имитатора датчиков подключен к одному из входов формирователя критических параметров, при этом блок коммутации управлякяцих команд снабжен логическими элементами ИЛИ, через которые его другие выходы подключены соответственно к сигнальному табло и одному из входов одного из элементов И. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 596498, кл. В 63 В 27/24, 08.07.74 (прототип).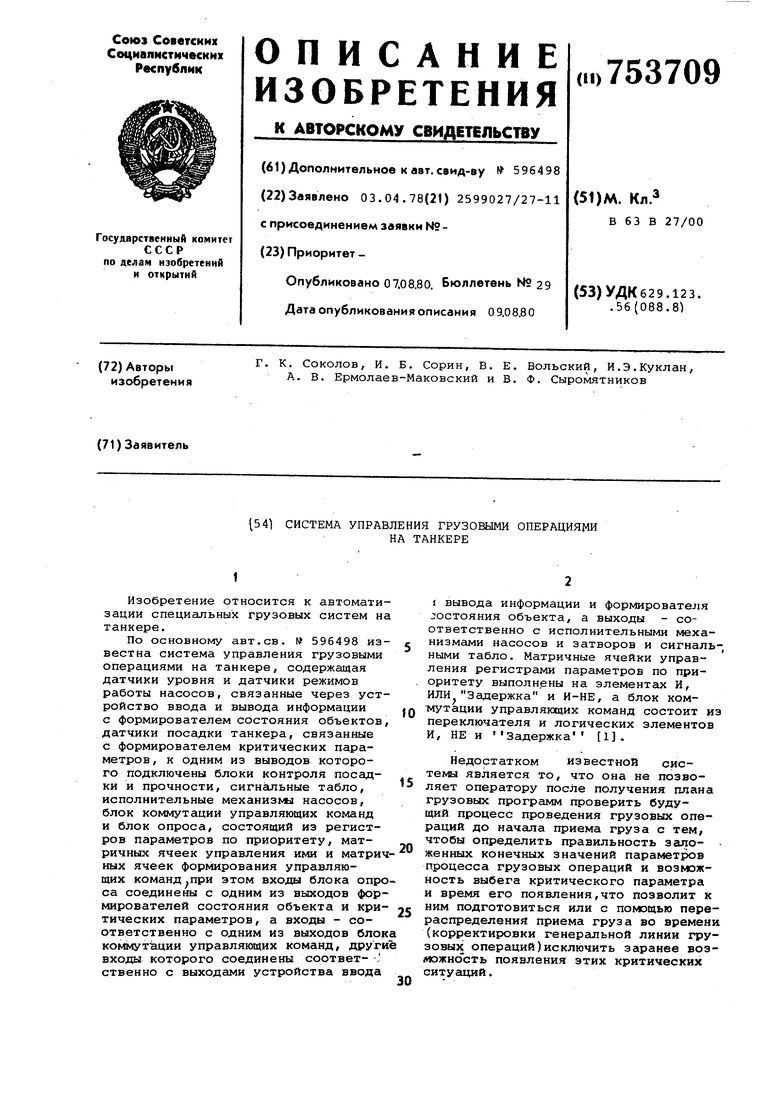
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления грузовыми операциями на танкере | 1979 |
|
SU919933A2 |
| Система управления грузовыми операциями на танкере | 1974 |
|
SU596498A1 |
| Коммутирующая сеть | 1986 |
|
SU1411766A1 |
| Устройство для приема и передачи телеинформации | 1977 |
|
SU696519A1 |
| Устройство для управления рабочимипОСТАМи | 1979 |
|
SU840927A2 |
| Устройство для сигнализации с индикацией местоположения аварийного объекта | 1982 |
|
SU1121689A1 |
| Устройство автоматизированного контроля | 1987 |
|
SU1525680A2 |
| Устройство для программного контроля электронных устройств | 1979 |
|
SU868775A1 |
| Устройство для управления распределенным объектом | 1986 |
|
SU1363144A1 |
| Телеметрическое устройство | 1979 |
|
SU858061A1 |